

9.3. Работа силы тяжести и силы упругости
Работа силы тяжести. Работа силы тяжести равна взятому со знаком плюс или минус произведению силы тяжести на вертикальное перемещение точки ее приложения
![]() ,
,
где Н – перемещение точки приложения силы по вертикали.
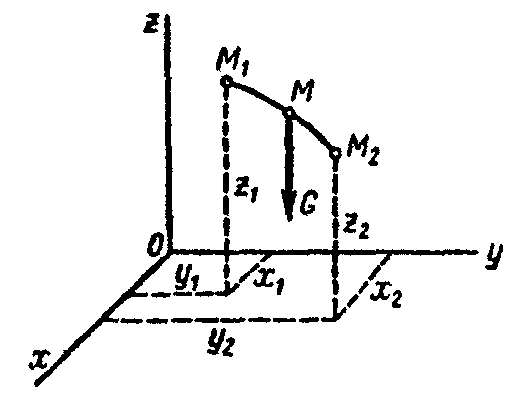
Рис. 3.58
Знак плюс соответствует перемещению точки вниз, а знак минус - перемещению точки вверх (рис. 3.58).
Работа силы тяжести не зависит от вида траектории перемещения точки, а зависит лишь от расстояния, пройденного точкой.
Работа
силы упругости.
Пружина АВ1
растягивается только вдоль оси х.
Проекция
силы упругости P
на ось х
![]() .
Работа силы
упругости на перемещении B1B2
=h
(рис. 3.59)
.
Работа силы
упругости на перемещении B1B2
=h
(рис. 3.59)
![]() ,
,
где h – величина деформации пружины.
Наибольшей
деформации пружины B1B2
соответствует наибольшее значение силы
упругости
![]() ,
а потому
,
а потому
![]() .
.

Рис. 3.59
Если
деформация пружины возрастает, работа
силы упругости отрицательна. Работа
силы упругости положительна, когда
деформация уменьшается. Если начальная
деформация пружины не равна нулю, а
равна хо,
то работа силы упругости на дополнительной
деформации (![]() )
)
 .
.
9.4. Работа сил, приложенных к твердому телу
а) Поступательное движение. Работа внутренних сил твердого тела при поступательном движении на любом его перемещении равна нулю.

Рис. 3.60
Элементарная работа всех сил, приложенных к телу, равна элементарной работе внешних сил (рис. 3.60):
![]() ;
;
![]() ;
;
![]() ,
,
где
![]() - главный вектор всех внешних сил.
- главный вектор всех внешних сил.
Работа на конечном перемещении
![]() .
.
б) Вращение твердого тела вокруг неподвижной оси. Элементарная работа сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси, равна произведению главного момента внешних сил относительно оси вращения на приращение угла поворота (рис. 3.61):
![]() .
.
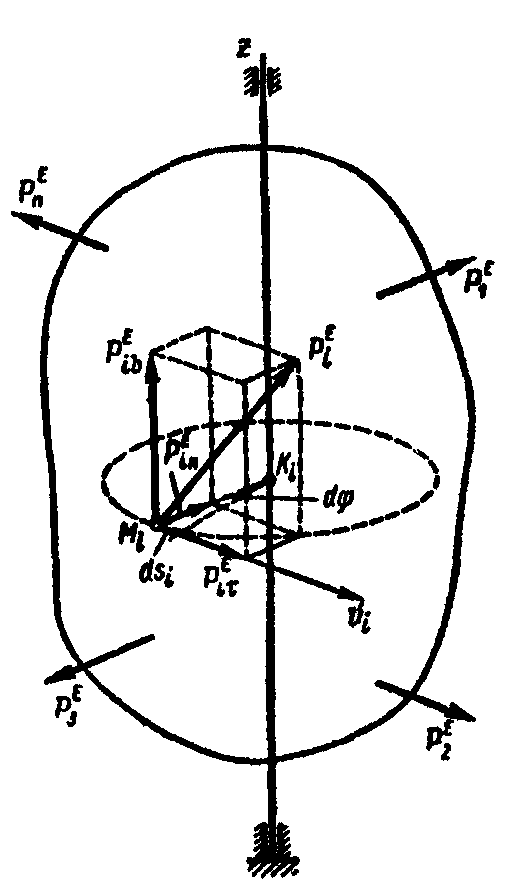
Рис. 3.61
Если при вращении тела значение его угла поворота изменяется от φ1 до φ2, то сумма работ сил на этом конечном перемещении
 .
(3.35)
.
(3.35)
В
случае, если главный момент внешних сил
относительно оси вращения тела постоянен,
![]() ,
,
 ,
(3.27)
,
(3.27)
т. е. в этом случае сумма работ сил на конечном перемещении равна произведению главного момента внешних сил относительно оси вращения на конечное изменение угла поворота тела.
В формуле (3.27) угол поворота выражен в радианах, а размерность работы совпадает с размерностью момента. Пользуясь формулой (3.26), можно определить мощность сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси с угловой скоростью ω:
![]() .
.
Задача
3.16. Груз 1
массой т1
= 2 кг
приводит в движение каток 2 массой
m2
= 1 кг.
Коэффициент трения качения
![]() =
0,01 м.
Определить работу внешних сил системы
при опускании груза 1 на высоту h
= 1 м,
если радиус катка R
= 0,1 м
(рис. 3.62).
=
0,01 м.
Определить работу внешних сил системы
при опускании груза 1 на высоту h
= 1 м,
если радиус катка R
= 0,1 м
(рис. 3.62).

Рис. 3.62
Решение.
Обозначим работу, совершаемую грузом
при перемещении, через
![]() ,
а работу катка через
,
а работу катка через
![]() .
.
![]()
![]()
![]()
![]() .
.
Глава 10. Теоремы об изменении кинетической энергии