

Задача 4. Применение общего уравнения динамики к изучению механической системы
Для
заданной механической системы определить
ускорение груза 1 и натяжение в ветви
нити 1, к которой прикреплен груз. Массами
нитей пренебречь. Система движется из
состояния покоя. Считать, что
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() см,
см,
![]() ,
f=
0,1 (рис. 1).
,
f=
0,1 (рис. 1).
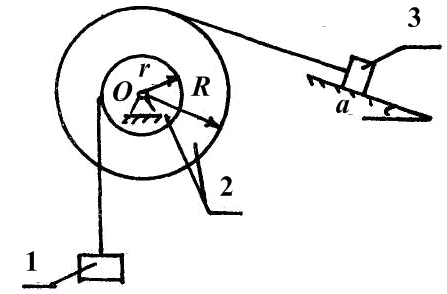
Рис 1
Решение.
1.
Составление расчетной схемы. На
механическую систему действуют активные
силы
![]() ,
,
![]() ,
,
![]() .
Применяя принцип освобождаемости от
связей к внешним связям, покажем
.
Применяя принцип освобождаемости от
связей к внешним связям, покажем
![]() ,
,
![]() ,
N. Силу трения
,
N. Силу трения
![]() изобразим в сторону, противоположную
предполагаемую направлению движения.
изобразим в сторону, противоположную
предполагаемую направлению движения.
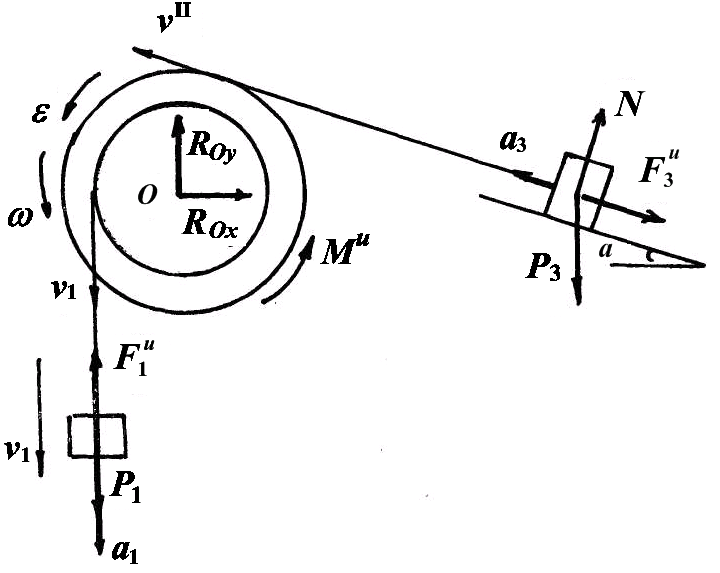
Рис. 2
Так как система пришла в движение из состояния покоя, то ускорения точек системы 1 направлены в сторону движения.
Приложим силы инерции. Тела 1 и 3 движутся поступательно, силы инерции этих тел выражаются векторами
![]()
и показываются на расчетной схеме противоположно ускорениям.
Силы
инерции блока 2, вращающегося вокруг
неподвижной оси Oz
с угловым ускорением
![]() ,
приводятся к паре, момент которой равен
,
приводятся к паре, момент которой равен
![]()
и изображается на схеме в сторону противоположную .
2. Выбор теоремы.
Применим общее уравнение динамики
![]() .
.
Произведение силы, перемещения точки приложения силы и косинуса угла, который образуют сила и направление движения, представляет собой работу силы на данном перемещении.
Работа силы на заданном перемещении равна нулю, если точка приложения силы неподвижна или сила перпендикулярна направлению движения.
3. Составление уравнения.
![]() ,
(1)
,
(1)
где
![]() - возможное перемещение тела 1,
- возможное перемещение тела 1,
![]() - угол поворота блока 2,
- угол поворота блока 2,
![]() -возможное перемещение центра масс тела
3 по направлению скорости,
-возможное перемещение центра масс тела
3 по направлению скорости,
![]() -высота, на которую поднимется центр
масс тела 3 при перемещении на
.
-высота, на которую поднимется центр
масс тела 3 при перемещении на
.
Уравнения связей. В общее уравнение динамики входят неизвестные перемещения. Выразим скорости центров масс и угловую скорость тел системы через скорость тела 1. Зависимости между возможными перемещениями такие же, как и между соответствующими скоростями.
Скорость
любой точки обода блока малого радиуса
равна скорости тела 1, а также произведению
угловой скорости тела 2 и радиуса вращения
![]() .
.
![]() ,
,
отсюда
![]() .
(2)
.
(2)
Вращательная
скорость любой точки обода блока большого
радиуса
![]() с одной стороны, равна произведению
угловой скорости блока
с одной стороны, равна произведению
угловой скорости блока
![]() и радиуса вращения R,
а с другой - скорости тела 3.
и радиуса вращения R,
а с другой - скорости тела 3.
![]() .
.
Подставляя значение угловой скорости, получим
![]() .
(3)
.
(3)
Проинтегрируем при нулевых начальных условиях равенство (2) и (3) и получим соотношения возможных перемещений точек системы
![]() .
.
Подставим полученные возможные перемещения в (1) и произведем замену
![]() .
.
![]()
Поделив
обе части равенства на
![]() запишем
запишем
![]()
Модули
силы инерции: тела 1
![]() ;
тела 2
;
тела 2
![]() .
.
Момент пары сил инерции
.
Связь между ускорениями точек системы получим, продифференцировав по времени уравнения (2) и (3)
![]() .
.
Тогда силы инерции точек системы запишутся
;
![]() .
.
Момент инерции блока
![]() .
.
Тогда
![]() .
.
Сила трения скольжения
![]() .
.
В
выражение (4) подставим значения сил
инерции, силы трения и учитывая, что
![]() ,
,
![]() запишем
запишем
![]() .
.
4. Определение неизвестных.
![]() .
.
Откуда
 .
.
Окончательно

Для
определения натяжения в ветви 1 - 2
мысленно разрежем нить и заменим ее
действие на груз 1 реакцией
![]() .
.
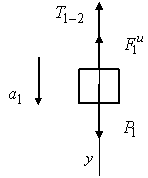
Общее уравнение динамики
![]() .
.
Откуда
![]() .
.