

11.4. Определение динамических реакций подшипников при вращении твердого тела вокруг неподвижной оси
Динамические давления в опорах и их реакции при вращении твердого тела (рис. 3.73,а) вокруг неподвижной оси определяются по формулам:
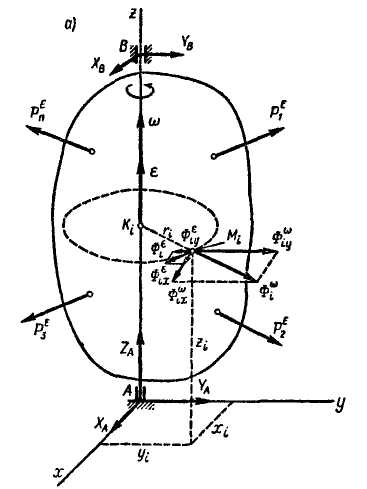
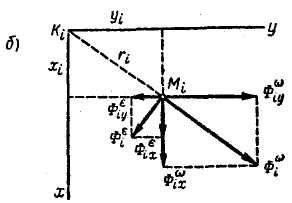
Рис. 3.73
Последнее
из уравнений не содержит реакций опор.
Это
уравнение
представляет собой дифференциальное
уравнение вращения тела. Остальные пять
уравнений позволяют определить пять
составляющих реакций подпятника А
и подшипника
В. В
первое, второе, четвертое и пятое
уравнения, из которых определяются
составляющие реакций опор вдоль осей
х и
у,
входят члены, зависящие как от внешних
задаваемых сил, так и от сил инерции.
Следовательно, каждая из этих реакций
имеет статическую составляющую,
вызываемую действием внешних задаваемых
сил
![]() и динамическую составляющую, зависящую
от сил инерции.
и динамическую составляющую, зависящую
от сил инерции.
Установлено, что динамические составляющие реакций подпятника и подшипника равны нулю в том случае, если ось вращения тела является главной центральной осью инерции тела.
Задача
3.20. Груз
массой
![]() =100
кг
поднимается при помощи лебедки массой
=100
кг
поднимается при помощи лебедки массой
![]() =110
кг
с постоянным ускорением
=110
кг
с постоянным ускорением
![]() м/с.
Лебедка установлена на горизонтальной
балке длиной l
= 2,6 м,
жестко закрепленной одним концом в
стене (рис. 3.74,а).
Подъем груза вызывается парой внешних
сил, действующих на барабан лебедки, с
моментом М=160
Н∙м,
радиус инерции барабана равен
м/с.
Лебедка установлена на горизонтальной
балке длиной l
= 2,6 м,
жестко закрепленной одним концом в
стене (рис. 3.74,а).
Подъем груза вызывается парой внешних
сил, действующих на барабан лебедки, с
моментом М=160
Н∙м,
радиус инерции барабана равен
![]() м,
а геометрический радиус R=0,12
м.
Определить реакции внешних связей
балки.
м,
а геометрический радиус R=0,12
м.
Определить реакции внешних связей
балки.
Решение.
Составление
расчетной схемы.
Объектом изучения является механическая
система, состоящая из трех тел: балки,
лебедки и груза. Активные силы:
![]() -
вес груза,
-
вес груза,
![]() -
вес лебедки, пара сил с моментом
-
вес лебедки, пара сил с моментом
![]() .
Система имеет внешние (жесткая заделка)
и внутренние (опирание лебедки на балку,
трос, связывающий груз и барабан лебедки)
связи.
.
Система имеет внешние (жесткая заделка)
и внутренние (опирание лебедки на балку,
трос, связывающий груз и барабан лебедки)
связи.
Принцип освобождаемости от связей применяем только к внешней связи, мысленно ее отбрасывая и заменяя действие связи на систему реакциями.
а) б)
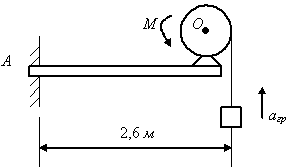
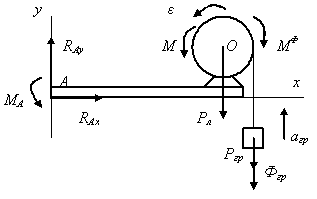
Рис. 3.74
Ускорение груза направлено вертикально вверх. Так как груз движется поступательно и прямолинейно, то полное ускорение груза равно его касательной составляющей
![]() .
.
Барабан лебедки при заданном направлении ускорения груза имеет угловое ускорение, направленное против часовой стрелки.
Силы
инерции точек барабана лебедки приводятся
к главному моменту сил инерции
![]() ,
который на расчетной схеме покажем в
сторону, противоположную угловому
ускорению, а сила инерции груза
,
который на расчетной схеме покажем в
сторону, противоположную угловому
ускорению, а сила инерции груза
![]() - в сторону, противоположную ускорению
груза.
- в сторону, противоположную ускорению
груза.
Систему отсчета изобразим так, чтобы начало отсчета совпало с точкой закрепления балки, направив ось х вдоль оси балки вправо, а ось у – вертикально вверх.
Выбор
теоремы. К
механической системе приложена плоская
произвольная система сил, которую можно
привести к главному вектору
![]() и
и
главному
моменту
![]() ,
выбрав за центр приведения точку А.
,
выбрав за центр приведения точку А.
Главный
вектор
![]() представляет
собой геометрическую сумму задаваемых
сил, реакций связей и сил инерции, а
главный момент
-
алгебраическую сумму моментов задаваемых
сил, реакций связей и сил инерции
относительно центра приведения.
представляет
собой геометрическую сумму задаваемых
сил, реакций связей и сил инерции, а
главный момент
-
алгебраическую сумму моментов задаваемых
сил, реакций связей и сил инерции
относительно центра приведения.
Принцип Даламбера запишем, используя главный вектор и главный момент сил, так как в задаче в качестве неизвестных выступают и силы реакции и реактивный момент.
![]() ,
(а)
,
(а)
![]() .
(б)
.
(б)
Составление уравнений. Спроецируем равенство (а) на оси декартовых координат и запишем алгебраическую сумму моментов всех сил, действующих на механическую систему:
![]() (в)
(в)
![]() (г)
(г)
![]() .
(д)
.
(д)
Определение неизвестных параметров. Из уравнения (в) следует, что
![]() .
.
Из уравнения (г) получим
![]() .
(е)
.
(е)
Из уравнения (д) получим
![]() .
(ж)
.
(ж)
Определение силы инерции груза и момента инерции барабана лебедки:
![]() ,
,
где
![]() - момент инерции барабана лебедки
относительно оси вращения, проходящей
через точку О.
- момент инерции барабана лебедки
относительно оси вращения, проходящей
через точку О.
Угловое
ускорение
![]() в
задаче не задано. Чтобы его определить,
запишем внутренние связи между лебедкой
и грузом. Если трос считать идеальной
связью (гибким и нерастяжимым), то
выполняется равенство
в
задаче не задано. Чтобы его определить,
запишем внутренние связи между лебедкой
и грузом. Если трос считать идеальной
связью (гибким и нерастяжимым), то
выполняется равенство
![]() .
.
Продифференцировав уравнение связи один раз по времени, получим связь ускорения груза и углового ускорения барабана лебедки
![]() ,
,
откуда
![]() .
.
Подставим
значения
![]() ,
а также заменив вес каждого тела на
произведение массы и ускорения свободного
падения, запишем:
,
а также заменив вес каждого тела на
произведение массы и ускорения свободного
падения, запишем:
![]()
![]()
 .
.
В
полученных выражениях часть слагаемых
(выделенные рамкой) имеют сомножитель
![]() ,
поэтому при равномерном прямолинейном
движении груза или его покое эти слагаемые
будут равны нулю.
,
поэтому при равномерном прямолинейном
движении груза или его покое эти слагаемые
будут равны нулю.
Части равенств, имеющих сомножителем ускорение, представляют собой динамические соотношения составляющих реакций:
![]() ;
;
![]() .
.
Остальные слагаемые относятся к статическим составляющим реакций
![]() ;
;
![]() .
.
Подставляя числовые параметры, определим:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Реакции жесткой заделки запишем в виде суммы статических и динамических составляющих:
![]() ;
;
![]() .
.
Анализ полученных результатов. При ускорении груза , направленным вверх, реакции жесткой заделки увеличиваются за счет динамических составляющих.