

ДОСЛІДЖЕННЯ СИСТЕМИ СИНХРОННОГО ОБЕРТАННЯ ДВИГУНІВ ПОСТІЙНОГО СТРУМУ З ДОПОМІЖНИМИ ІНДУКЦІЙНИМИ МАШИНАМИ
І Н С Т Р У К Ц І Я
до лабораторної роботи № 3
з курсу
“ Тягові передачі електротранспорту“
Відповідальний за випуск О.Ю. Лозинський, д.т.н., проф.
1. Основні відомості.
Для багатьох механізмів необхідне точне синхронне обертання двох або декількох валів. Воно може бути забезпечене з допомогою різного роду механічних передач і привода механізму від одного двигуна. Але для спрощення кінематики слід ставити окремі двигуни для кожного робочого органу і використовувати схему синхронного обертання, яку називають також “електричним валом”. В окремих випадках синхронність обертання валів може бути досягнена тільки з допомогою синхронного вала. Системи синхронного обертання використовують в транспортних засобах механізмах гідротехнічних споруд (затвори, ворота шлюзів, розвідні мости), в металургійній промисловості (летючі ножиці, привід візків для транспортування великих листів в піч для відпалювання ), в металорізальних верстатах (замість ходових гвинтів та валів) та інших.
Існує дві основні групи систем синхронного обертання:
системи з допоміжними синхронізуючими (вирівнюючими) машинами;
системи в яких зворотний зв'язок здійснюється між основними привідними двигунами.
Незважаючи на те, що системи другої групи простіші у виконанні, вони отримали менше розповсюдження, ніж системи першої групи, тому що мають ряд істотних недоліків.
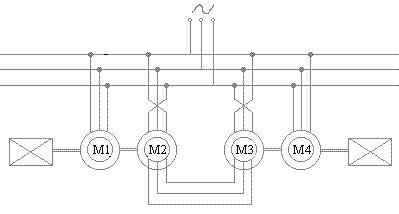
Рис.3.1.
Принципова схема системи синхронного
обертання двох валів з допоміжними
асинхронними машинами зображена на
рис.1. Головними привідними двигунами
М1 і М4 можуть бути як двигуни змінного
так і постійного струму. В ролі допоміжних
синхронізуючих машин М2 і М3 в більшості
використовуються асинхронні машини з
фазним ротором. Обмотки статорів головних
і допоміжних машин приєднуються до
однієї мережі змінного струму. Відповідні
фази роторів з’єднані між собою таким
чином, щоб їх е.р.с. були направлені
зустрічно. Якщо навантаження на обох
валах робочих машин 1 і 2 рівні, а механічні
характеристики головних привідних
двигунів М1 і М4 ідентичні, то ротори цих
двигунів будуть обертатися синхронно.
При цьому е.р.с. роторів допоміжних машин
М2 і М3 рівні за величиною і знаходяться
в протифазі. В результаті струм в колі
роторів допоміжних машин не протікає,
а в їх статорні обмотки надходить з
мережі лише намагнічуючий струм. На
рис. 2 зображено миттєве взаємне
розташування роторів, умовно показаних
в вигляді витків, а також векторні
діаграми вторинних е.р.с. і зрівноважувальних
струмів для цього розподілу навантажень
і при обертанні роторів допоміжних
машин в напрямі поля. Магнітні поля обох
машин збігаються, отже зображені умовно
одним полюсом, який рухається з синхронною
швидкістю
![]() .
.
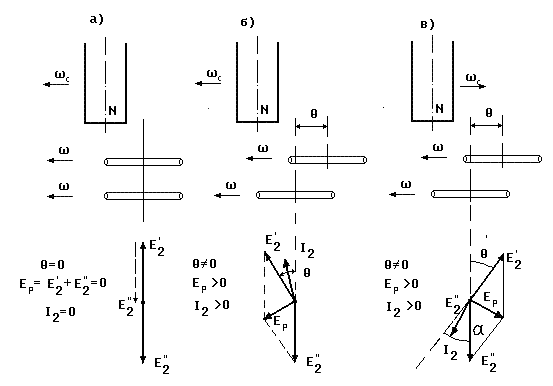
Рис.2.
Якщо статичні моменти на валах 1 і 2 не
рівні, наприклад, якщо
![]() ,
то ротор більше завантаженого привідного
двигуна М1 відстане від ротора двигуна
М3 на деякий кут
,
то ротор більше завантаженого привідного
двигуна М1 відстане від ротора двигуна
М3 на деякий кут
![]() .
При цьому е.р.с. відстаючої машини
.
При цьому е.р.с. відстаючої машини
![]() буде випереджувати е.р.с.
буде випереджувати е.р.с.
![]() на той же кут
(рис.2.б). Отже виникне результуюча е.р.с.
на той же кут
(рис.2.б). Отже виникне результуюча е.р.с.
![]() ,
яка викличе зрівнюючий струм
,
яка викличе зрівнюючий струм
![]() .
Активна складова струму
знаходиться в фазі з е.р.с.
.
Активна складова струму
знаходиться в фазі з е.р.с.
![]() ,
тобто допоміжна машина того вала, який
навантажений більшим статичним моментом,
працює в режимі двигуна, споживаючи
енергію з мережі. Таким чином робочий
двигун M1 розвантажується. Момент, який
розвиває машина M2, при знехтуванні
активним опором обмотки статора
визначається за формулою
,
тобто допоміжна машина того вала, який
навантажений більшим статичним моментом,
працює в режимі двигуна, споживаючи
енергію з мережі. Таким чином робочий
двигун M1 розвантажується. Момент, який
розвиває машина M2, при знехтуванні
активним опором обмотки статора
визначається за формулою
 , (1)
, (1)
де
- кут непогодження в електричних градусах;
s - ковзання допоміжної машини;
![]() - критичне ковзання допоміжної машини.
- критичне ковзання допоміжної машини.
Активна складова роторного струму
у відношенні до е.р.с.
![]() другої допоміжної машини знаходиться
в протифазі і викликає від’ємний момент.
Допоміжна машина, навантажена меншим
статичним моментом, працює як генератор
по відношенні до мережі, а це значить,
що вона підвантажує зв’язаний з нею
робочий двигун. Таким чином, навантаження
привідних двигунів буде вирівнюватись.
другої допоміжної машини знаходиться
в протифазі і викликає від’ємний момент.
Допоміжна машина, навантажена меншим
статичним моментом, працює як генератор
по відношенні до мережі, а це значить,
що вона підвантажує зв’язаний з нею
робочий двигун. Таким чином, навантаження
привідних двигунів буде вирівнюватись.
Момент, який розвиває машина M4, визначається за формулою
 . (2)
. (2)
Допоміжні машини можуть обертатись не
тільки за полем, але й проти поля. Умови
роботи системи при цьому не міняються.
Але в цьому випадку ротор допоміжної
машини M2, з’єднаний з валом двигуна,
який навантажений більшим статичним
моментом, при відставанні буде зміщуватися
в напрямку обертання поля. Відповідно
вектор е.р.с. ротора M2 буде відставати
від вектора е.р.с. ротора М4 на кут
,
а не випереджувати, як це було при
обертанні за полем. Це викличе зміну
напрямку результуючої е.р.с. і
вирівнювального струму в колі роторів.
Як видно з векторної діаграми рис. 2.в,
побудованій для цього випадку, активна
складова струму ротора знаходиться в
протифазі у відношенні до е.р.с.
,
тобто перша допоміжна машина у відношенні
до мережі працює в генераторному режимі,
споживаючи енергію з боку ротора. Тому
що ковзання, при якому працюють допоміжні
машини,
![]() ,
то частина енергії, яка споживається
машиною М4 з боку ротора, передається
на вал системи, розвантажуючи робочий
двигун, вал якого навантажений більшим
статичним моментом.
,
то частина енергії, яка споживається
машиною М4 з боку ротора, передається
на вал системи, розвантажуючи робочий
двигун, вал якого навантажений більшим
статичним моментом.
Моменти, які розвивають допоміжні машини при обертанні їх роторів проти поля, визначаються за формулами
, (3)
 . (4)
. (4)
Формули для
![]() і
і
![]() начебто помінялися місцями у відношенні
до випадку обертання роторів допоміжних
машин за полем. Але машина М2 буде й далі
працювати в режимі двигуна, а машина
М4 в режимі генератора. Зміна знаків
моментів допоміжних машин вказує лише
на те, що ці моменти інакше будуть
орієнтовані відносно напрямку обертання
магнітного поля.
начебто помінялися місцями у відношенні
до випадку обертання роторів допоміжних
машин за полем. Але машина М2 буде й далі
працювати в режимі двигуна, а машина
М4 в режимі генератора. Зміна знаків
моментів допоміжних машин вказує лише
на те, що ці моменти інакше будуть
орієнтовані відносно напрямку обертання
магнітного поля.
В результаті аналізу формул (1)-(4) випливає, що при малих ковзаннях допоміжні машини можуть розвивати дуже малі моменти. Тому, звичайно, стараються обертати допоміжні машини проти поля і працювати при ковзаннях, близьких до двох. На рис. 1 це умовно показано перехрещенням провідників, які підходять до статорів допоміжних машин. Для роботи електричного вала найбільш істотним є не абсолютне значення моментів допоміжних машин, а їх різниця, тому що тільки вона вирівнює навантаження основних приводних двигунів. Згідно з рівняннями(1) і (2)
 . (5)
. (5)
Звідси виходить, що кут
=90![]() є граничним; при дальшому збільшенні
нерівномірності навантажень на валах
механізмів, коли кут
стає більшим від 90
,
робота установки порушиться - машини
випадуть з синхронного режиму.
є граничним; при дальшому збільшенні
нерівномірності навантажень на валах
механізмів, коли кут
стає більшим від 90
,
робота установки порушиться - машини
випадуть з синхронного режиму.
Перед ввімкненням системи синхронного обертання в мережу необхідно спочатку її синхронізувати. Для цього можна застосувати одну з однофазних схем вмикання допоміжних машин, зображену на рис. 3. Застосування трифазної схеми вмикання для попередньої синхронізації недопустиме, тому що при цьому в кривій моментів при s=1 виникає постійна складова, направлена в сторону обертання поля машин, що може викликати небажані явища. Якщо після вмикання привода є невеликий кут непогодження між роторами, то вони, зробивши декілька коливань, займуть узгоджене положення. Якщо є деякий кут непогодження, а момент статичного опору невеликий, то двигуни можуть навіть декілька разів обернутись і тільки через деякий час зупиняться в узгодженому положенні. Якщо ж статичний момент на валі першої машини малий, а на валі другої великий, тобто, практично, її ротор загальмований, то перша машина почне обертатись і працюватиме в режимі подвійного живлення.

Рис.3. Схеми вмикання допоміжних машин.
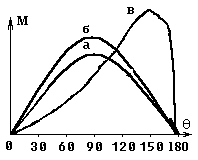
Рис.4. Залежність узгоджую чого моменту від кута непогодження роторів допоміжних машин .
В однофазних схемах постійної складової в кривій моментів немає. Для однофазних схем вмикання, зображених на рис. 3, криві моментів наведені на рис. 4. Як видно з рис. 4, характеристика моментів ”в”, яка відповідає схемі рис. 3.в, хоч і має максимум моменту вищий, ніж у характеристик “а” і ”б”, але є менш сприятлива, тому що при невеликих кутах непогодження має дуже малий момент. Тому на практиці для попередньої синхронізації частіше використовують схему рис. 3.а або 3.б. В більшості випадків перевагу віддають схемі рис. 3.а, тому що, хоч вона має менший синхронізуючий момент, але не потребує складних перемикань при переході від попередньої синхронізації до робочої.
Метою роботи є вивчення впливу величини ковзання допоміжних машин на роботу системи синхронного обертання, вивчення способів попередньої синхронізації таких систем і набуття навиків налагодження подібних схем.