

2.4 Багатомасові механічні системи
При проведенні у попередньому
розділі операції зведення реальної
схеми механічної частини ЕП до
розрахункової було знехтувано жорсткістю
елементів. Дійсно, елементи механічної
частини ЕП мають певну кінцеву жорсткість
(у попереднім підрозділі ми вважали
жорсткість елементів нескінченною),
тобто при певних навантаженнях елементи
деформуються (у межах пружних деформацій).
Звертаючись до вищерозглянутої схеми
механічної частини ЕП піднімальної
лебідки, до таких елементів слід віднести
канат К
й вали, що з’єднують двигун з редуктором
та редуктор з барабаном. Для урахування
впливу таких деформацій уводять поняття
коефіцієнтів жорсткості пружних
елементів. При поступальному русі
характер коефіцієнта жорсткості лінійний
![]() .
При обертальному русі коефіцієнт
жорсткості кручення
.
При обертальному русі коефіцієнт
жорсткості кручення
![]() .
Для двомасової системи ураховується
один пружній елемент реальної схеми.
Для три масової – два пружних елемента
реальної схеми.
.
Для двомасової системи ураховується
один пружній елемент реальної схеми.
Для три масової – два пружних елемента
реальної схеми.
Для пружного елемента, що рухається поступально, коефіцієнт жорсткості при розтяганні або стисканні є коефіцієнтом пропорційності між лінійною деформацією елемента та зусиллям, що виникає у ньому
![]() ,
[
,
[![]() ]
]
де
![]() - зусилля, що виникає у пружному елементі
при розтяганні, або стисканні його, [Н];
- зусилля, що виникає у пружному елементі
при розтяганні, або стисканні його, [Н];
![]() - лінійна деформація елемента
при його розтяганні або стисканні, [м].
- лінійна деформація елемента
при його розтяганні або стисканні, [м].
Для пружного елемента (вала)
при крученні коефіцієнт жорсткості
![]() є коефіцієнтом пропорційності між
кутовою деформацією вала та моментом,
що виникає на ньому
є коефіцієнтом пропорційності між
кутовою деформацією вала та моментом,
що виникає на ньому
![]() ,
[Нм]
,
[Нм]
де
![]() - момент, що виникає на пружному елементі
(на валу) при його обертанні, [Нм];
- момент, що виникає на пружному елементі
(на валу) при його обертанні, [Нм];
![]() - кутова деформація вала при
його обертанні, [радіан].
- кутова деформація вала при
його обертанні, [радіан].
Двомасова розрахункова механічна система буде у тому випадку, коли ураховується один пружній елемент реальної кінематичної схеми. Така розрахункова система має вигляд поданий на рисунку 2.4.
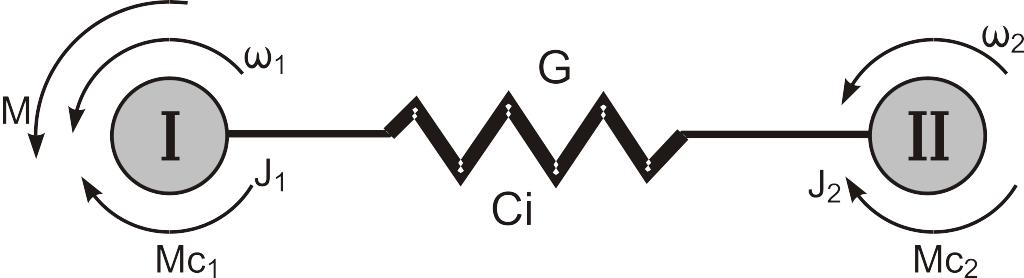
Рисунок 2.4 – Двомасова зведена розрахункова схема.
Тут найчастіше першу масу І утворюють маса рухомої частини електродвигуна (ротора) й маса решти елементів механічної частини ЕП між електродвигуном та пружним елементом G. Другу масу ІІ утворюють маса робочого органу й маса решти елементів механічної частини ЕП між робочим органом та пружним елементом G. Обидві інерційні маси (І та ІІ) пов’язані пружним елементом G з коефіцієнтом жорсткості Сі.
Рух двомасової системи має досить складний коливальний характер у більшості випадків. Ці коливання визначаються процесом обміну енергією проміж масами І та ІІ через пружній елемент G. При цьому можливе виникнення явища механічного резонансу.
Ще більш складним рух у тримасових механічних системах, коли враховується пружність (не одного як у двомасових системах), двох елементів механічної частини ЕП.
Багатомасові розрахункові системи одержуються й в інших випадках, наприклад, коли враховуються проміжки між елементами механічної частини ЕП. Наявність проміжків надає руху нелінійний характер, що також суттєво ускладнює розрахунок таких систем.
2.5 Типові статичні навантаження еп
Електромагнітний момент (зусилля) двигуна є вихідною величиною системи автоматизованого електропривода й вхідною величиною його механічної частини, а решта моментів або зусиль визначають його статичне навантаження
![]() .
.
Для будь-якої розрахункової схеми (одно-, дво-, три масової) це навантаження (для конкретного ЕП) залишається одним і тим же.
Усі ці моменти (зусилля) навантаження, які прикладені до механічної частини ЕП можна поділити на дві групи:
корисні навантаження робочого органа;
моменти й сили механічних втрат.
![]() ,
[Нм]
,
[Нм]
де
![]() - сумарний зведений момент корисного
навантаження, Нм;
- сумарний зведений момент корисного
навантаження, Нм;
![]() - сумарний зведений момент
втрат (включає й момент механічних втрат
електродвигуна), Нм.
- сумарний зведений момент
втрат (включає й момент механічних втрат
електродвигуна), Нм.
Корисне навантаження є одним з головних факторів, які пов’язують ЕП з технологічним процесом механізму чи машини, які приводить до руху цей ЕП.
Моменти (зусилля) корисного навантаження у різних виробничих механізмах (робочих машинах) мають різний характер. Усе різноманіття виробничих механізмів за характером моментів (зусиль) навантаження можна умовно поділити на чотири категорії (класи). Критерієм такої класифікації править залежність навантаження від швидкості, так звана механічна характеристика виробничого механізму. Для обертальних ЕП вона має вигляд
![]() ,
(2.5)
,
(2.5)
де - зведений до вала двигуна статичний момент опору, [Нм];
- зведена до вала двигуна кутова швидкість (кутова швидкість двигуна), [ ].
Розглядаючи далі особливості зусиль й моментів, що діють у механічній частині електропривода, слід відзначити наступне.
За характером взаємодії з ЕП усі сили й моменти поділяються на
активні;
реактивні.
Активними силами й моментами звуться сили й моменти, що створюються зовнішніми відносно електродвигуна джерелами механічної енергії незалежно від напрямку руху ЕП, наприклад, потенційною енергією вантажів, що переміщуються вертикально або енергією вітру й таке інше. Характерним є прояв активних сил й моментів у вантажопіднімальних механізмах.
Реактивними силами й моментами називають сили й моменти опору руху, що виникають як реакція на активний рушійний момент, що створює електродвигун, або на інший будь-який активний рушійний момент, який не створюється електродвигуном, наприклад, реакція на момент, створений силою інерції. Ці навантаження завжди діють у напрямку, протилежному напрямку руху ЕП, вони змінюють свій напрямок при реверсі швидкості електродвигуна.
Отже, усі реактивні сили й моменти залежать від швидкості. За характером цієї залежності їх поділяють на:
навантаження сухого тертя;
навантаження в’язкого тертя;
навантаження вентиляційного типу.
Навантаження сухого тертя залежить від значень коефіцієнтів тертя (від матеріалу, характеру технологічного процесу, наприклад, обробка різанням, тиском й таке інше).
Навантаження в’язкого тертя у дійсності зустрічається мало. Суттєвим вони можуть бути при динамічних процесах у механічній системі електропривода при деформаціях валів, муфт, канатів та інших елементів механічної частини ЕП.
Навантаження вентиляційного типу виникають на розвинених частинах елементів механічної частини ЕП й самого електродвигуна, що обертаються.