

5.4 Пуск дпс нз до основної швидкості при багатоступінчастому пусковому резисторі
Перехідний процес пуску ДПС НЗ до основної кутової швидкості при багатоступінчастому пусковому реостатові здійснюється за схемою (для триступінчастого пускового реостата), наведеною на рисунку 5.4.
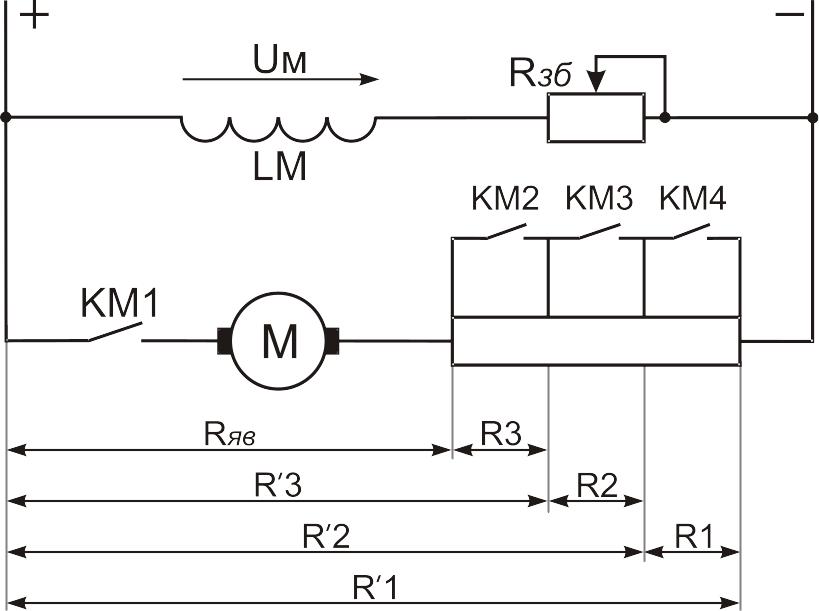
Рисунок 5.4 – Схема пуску ДПС НЗ для триступінчастого пускового реостата.
Аналіз електромагнітної сталої (рівняння 5.5):
![]()
показує, що для прискорення перехідного режиму (при заданих та ) слід зменшувати опір якірного кола, але це призведе до зростання струму при пуску. Вищерозглянутий випадок запуску ДПС НЗ з постійно (на час пуску) уведеним резистором дозволяє знизити пусковий струм до бажаного, але при цьому час пуску досить значний. Багатоступінчастий пуск (з поступовим виведенням ступенів пускового реостату) дозволяє зберегти у заданих межах пусковий струм, зменшивши при цьому час запуску, оскільки при виведенні ступенів опору резистора, стала часу зменшується.
При запуску ДПС НЗ у декілька
ступенів задаються певними межами
коливань пускового струму (або момента)
- від
![]() та
та
![]()
![]() - мінімальний струм перемикання.
- мінімальний струм перемикання.
Цей струм повинен перевищувати номінальний на (10 – 20)% для впевненого здійснення запуску при найбільшому (номінальному) навантаженні.
![]() - максимальний струм перемикання
(він же й початковий струм запуску).
- максимальний струм перемикання
(він же й початковий струм запуску).
Цей струм бажано збільшувати для прискорення часу перехідного режиму – покращення динаміки розгону. Але більш ніж у ~2,5 рази порівняно з номінальним він не може бути збільшеним, оскільки зростає нагрівання обмоток й суттєво погіршується комутація.
З цих міркувань пускова діаграма ДПС НЗ (при триступінчастому резисторі) буде мати вигляд, показаний на рисунку 5.5.
На рисунку R1; R2; R3 і Rяв позначені у масштабі, збільшеному у I2/IС разів.
У міру виведення пускового реостата опір якірного кола зменшується, отже зменшується , що призводить до зменшення часу розгону якоря (зменшення сталої часу)
![]() ,
отже
,
отже
![]() .
.
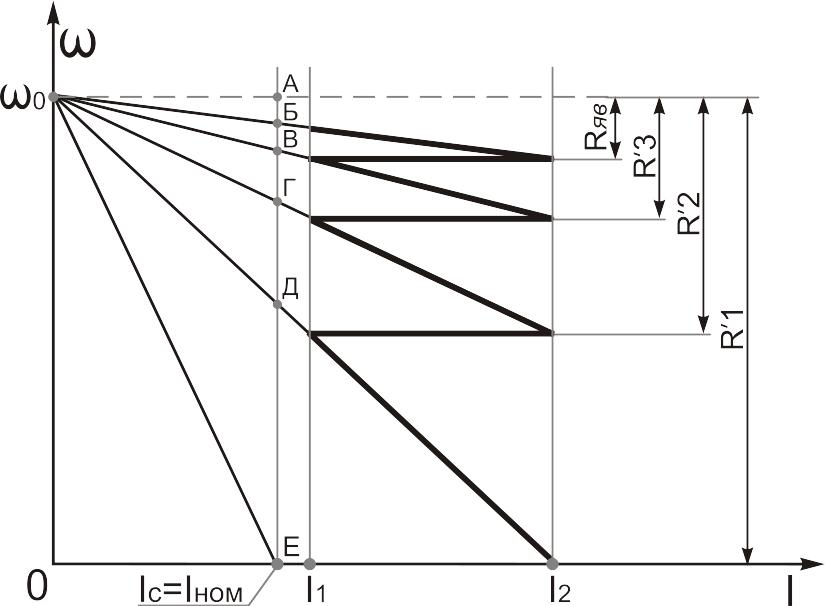
Рисунок 5.5 – Пускова діаграма ДПС НЗ з триступінчастим пусковим реостатом.
Величину опорів ступенів
пускового реостата
(![]() )
можна визначити графічно.
)
можна визначити графічно.
![]() ;
;
![]() ;
;
![]() .
.
![]() ;
;
![]() - номінальний опір двигуна;
- номінальний опір двигуна;
![]() ;
;
![]() ;
;
![]() ,
,
або:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
де
![]() - масштаб опору.
- масштаб опору.
Зауваження. Умовні позначення усіх опорів (та їх складових), прийнятих на рисунках 5.4 та 5.5, збігаються й відповідають таким текстової частини підрозділу 5.4.
Графік пуску ДПС НЗ у три ступеня пускового реостата поданий на рисунку 5.6.
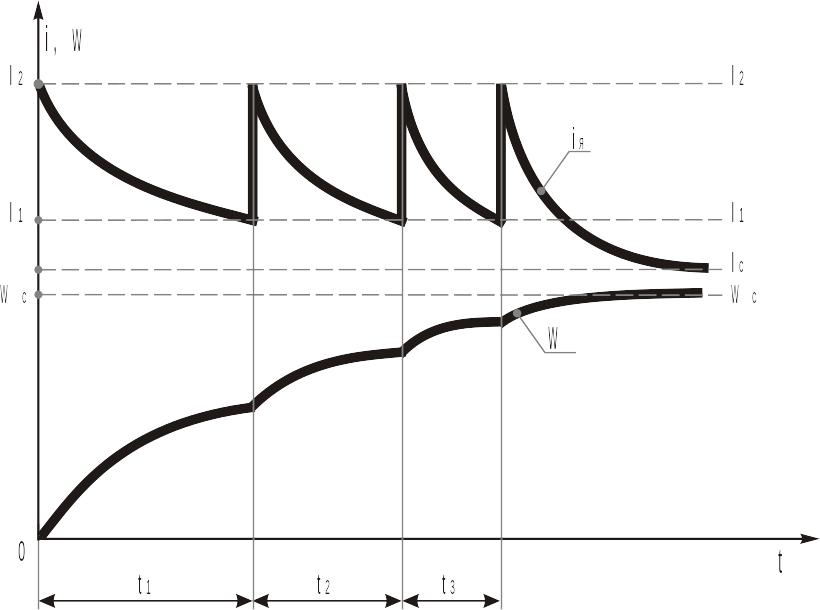
Рисунок 5.6 – Графік змінювання струму якоря і кутової швидкості ДПС НЗ.
Він характерний тим, що струм
двигуна при пуску коливається у межах
від
до
на початку пуску
![]() ,
далі, у міру прискорення якоря, зростає
ЕРС двигуна, внаслідок чого його струм
починає зменшуватись (отже й момент).
Коли струм досягне значення
слід вимкнути перший ступінь
резистора
з таким розрахунком, щоб струм якоря
знову досяг значення
,
й так далі. Аналогічним чином змінюється
й крива кутової швидкості.
,
далі, у міру прискорення якоря, зростає
ЕРС двигуна, внаслідок чого його струм
починає зменшуватись (отже й момент).
Коли струм досягне значення
слід вимкнути перший ступінь
резистора
з таким розрахунком, щоб струм якоря
знову досяг значення
,
й так далі. Аналогічним чином змінюється
й крива кутової швидкості.
і
![]() - усталені значення струму якоря і
швидкості відповідно для заданого
статичного навантаження двигуна.
- усталені значення струму якоря і
швидкості відповідно для заданого
статичного навантаження двигуна.