

3.16.3 Механічні статичні характеристики сд у гальмівних режимах
Електричне гальмування СД можливо здійснити тільки двома способами:
- противвімкненням;
- динамічним гальмуванням.
Гальмування противвімкненням здійснюється аналогічно асинхронним двигунам, застосовується рідко, оскільки воно супроводжується значними поштовхами струму, які перевищують пускові струми й суттєво „лихоманять” мережу.
Значно більше розповсюджене динамічне гальмування СД (обмотка статора відмикається від мережі й через додатковий опір замикається сама на себе). Інтенсивність гальмування вище, ніж при противвімкненні, витрати енергії значно менші, динамічні удари й поштовхи струму майже відсутні.
Інтенсивність гальмування залежить від величини опору, на який замкнена обмотка статора (якоря) СД.
3.17 Механічні статичні характеристики двигунів у багатодвигуневому приводі
Бувають випадки, коли у системі електропривода працюють не один, а два або більше двигунів на спільне навантаження.
Такі системи мають наступні переваги порівняно з однодвигуневим приводом:
- більш широкі можливості регулювання швидкості й момента;
- взаємне реверсування машин;
- зниження сумарного момента інерції системи;
- створення потужних установок з використанням серійних машин порівняно невеликої одиночної потужності;
- спрощення механічного обладнання та краще конструктивне розміщення електродвигунів;
- підвищення надійності.
Якщо взяти два АД з фазним ротором половинної потужності аніж вимагає це виконавчий механізм, то це зменшить момент інерції майже вдвічі, якщо був би один двигун номінальної потужності (момент інерції пропорційний масі у першому степені, а лінійному розміру – в квадраті). При цьому можна одержати механічні характеристики з малою крутістю (як у двигуневому, так і у гальмівному режимах).
Оскільки обидва ротори механічно жорстко пов’язані між собою, а обмотки статорів підімкнені до мережі таким чином, що у двигуневому режимі напрямок моментів двигунів співпадають, то вихідний момент системи буде дорівнювати алгебраїчній сумі моментів окремих двигунів.
Для одержання знижених швидкостей та механічних характеристик з малою крутістю слід одну з машин перевести у двигуневий режим роботи, а другу - в режим гальмування противвімкненням (дивись рисунок 3.52). Величина моментів, що розвиває кожний двигун, забезпечується відповідним підбором активних опорів у колах роторів ( й ).
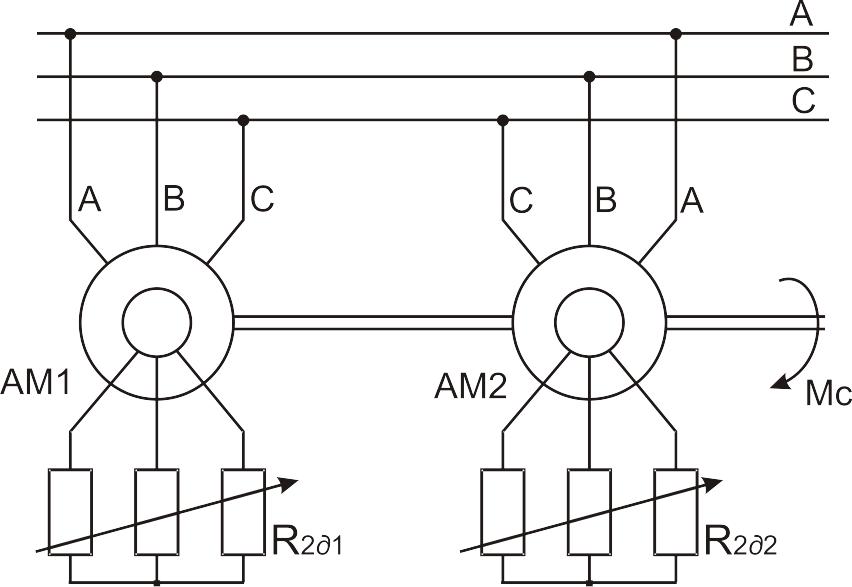
Рисунок 3.52 – Комбінований режим (двигуневий і гальмівний) дводвигуневого ЕП на базі АД з фазним ротором.
Якщо двигун
![]() працює у двигуневому режимі, то
працює у двигуневому режимі, то
![]() - у гальмівному режимі противвімкнення.
- у гальмівному режимі противвімкнення.
Механічна характеристика такого привода (рисунок 3.53) будується як сума моментів двигуна та двигуна для поточних значень швидкості у двигуневому та гальмівному режимах, на рисунку:
1 – механічна характеристика двигуна (у двигуневому режимі);
2 – механічна характеристика двигуна (у режимі противвімкнення);
3 – вислідна механічна характеристика привода.
Як видно з характеристики 3
швидкість ідеального неробочого
ходу
електропривода нижче синхронних
швидкостей першого і другого двигуна
відповідно
![]() та
(за модулем).
та
(за модулем).
Крутість механічної характеристики привода (лінія 3) менше крутості характеристики першого і другого двигунів, відповідно лінії 1 та 2.
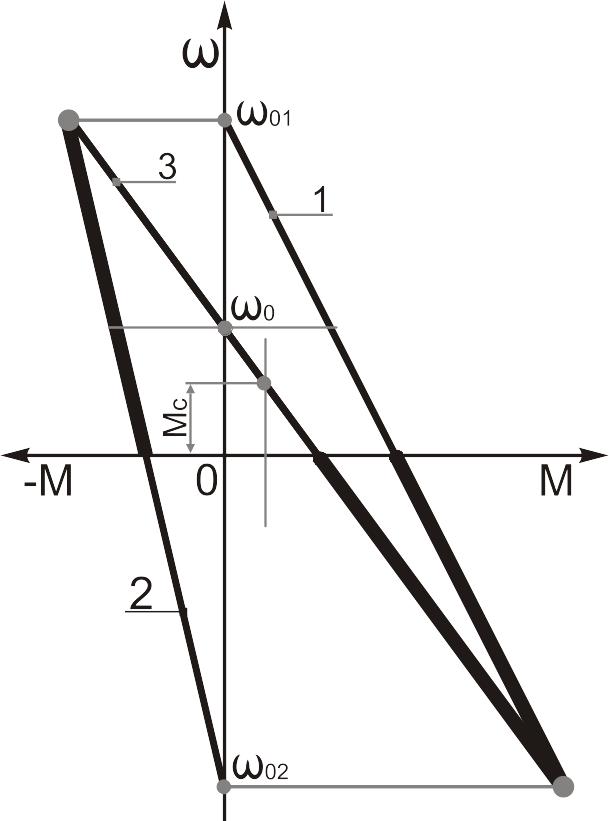
Рисунок 3.53 – Механічна характеристика дводвигуневого ЕП у комбінованому режимі роботи двигунів.
І нарешті рушійний момент (або гальмівний) привода (крива 3) дорівнює сумі моментів в обох двигунів (криві 1 та 2)
![]() ,
,
де
![]() - момент привода;
- момент привода;
![]() - момент 1-го двигуна;
- момент 1-го двигуна;
![]() - момент 2-го двигуна.
- момент 2-го двигуна.
Вадами такої системи є суттєво нагрівання машини, що працює у режимі противвімкнення. Щоб зменшити нагрівання двигуна, що працює у режимі гальмування противвімкнення, його можна використовувати не у гальмівному режимі противвімкненням, а у режимі динамічного гальмування з незалежним збудженням, а режим роботи 1-ї машини залишити без змін.
Другий приклад. Обидва двигуни ( й ) працюють у двигуневому режимі на спільне навантаження , хай це будуть АД з короткозамкненим ротором із різною жорсткістю механічних характеристик (рисунок 3.54), механічні характеристики такого привода подані на рисунку 3.55.
На цих рисунках прийняті такі позначення:
1 – механічна характеристика - двигуна з більш жорсткою механічною характеристикою;
2 – механічна характеристика - двигуна з менш жорсткою механічною характеристикою;
3 – вислідна механічна характеристика привода;
4 – механічна характеристика виконавчого (вантажопідіймального) механізму.
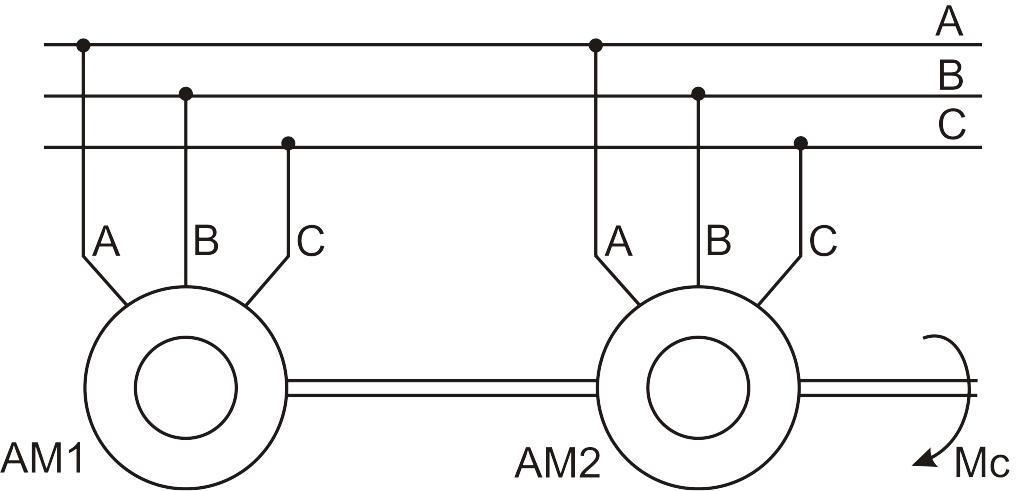
Рисунок 3.54 – Дводвигуневий ЕП для випадку роботи обох двигунів у двигуневому режимі.
Характеристика 3 будується як вислідна характеристик 1 та 2 – механічних характеристик двигунів й , обмотки статорів яких увімкнені так, що обидва працюють у двигуневому режимі (обидва мають однакову черговість слідування фаз: А, В, С), а вали двигунів жорстко пов’язані між собою і з’єднані з навантаженням (вантажопідіймальний механізм).
Вислідний момент
![]() (характеристика 3) дорівнює
(характеристика 3) дорівнює
![]() .
.
Як видно, двигуни завантажені не рівномірно, двигун з більш жорсткою характеристикою ( ) завантажений більше, ніж двигун з більш м’якою механічною характеристикою. Отже, якщо обидва двигуна однакової потужності, то при повному завантаженні привода, двигун виявиться перевантаженим, а двигун - недовантаженим. При однаковій жорсткості механічних характеристик двигунів вони будуть завантажені рівномірно.
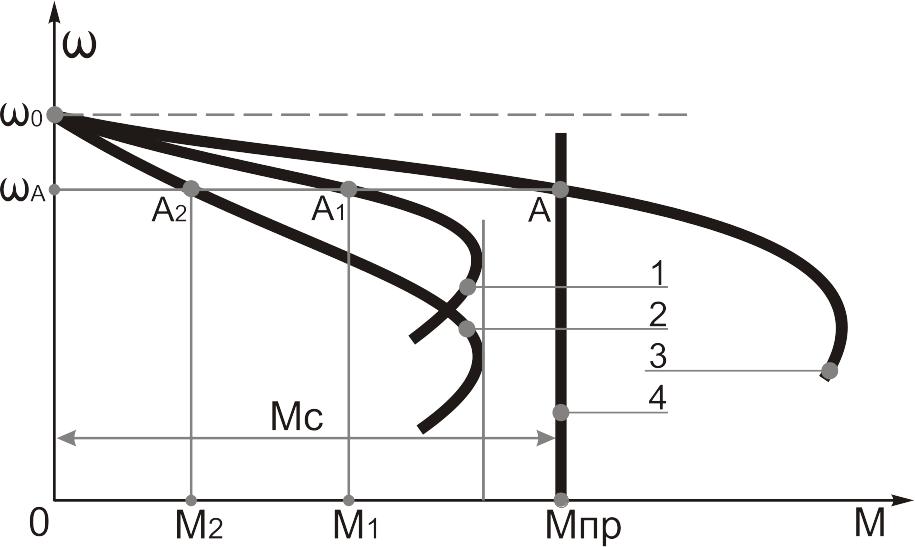
Рисунок 3.55 – Механічні характеристики дводвигуневого ЕП для випадку роботи обох двигунів у двигуневому режимі.
Тому при підбиранні двигунів для роботи на спільне навантаження за вищенаведеною схемою необхідно ураховувати жорсткість їх механічних характеристик.