

7.4.2 Основи автоматичного керування електроприводів змінного струму
Для прикладу розглянемо автоматичне регулювання кутової швидкості асинхронних електроприводів за допомогою тиристорних регуляторів напруги (ТРН).
Як відомо, у розімкненій системі керування асинхронний двигун не може працювати на нестійкій ділянці механічної статичної характеристики.
У замкнених системах керування асинхронний двигун може стійко працювати забезпечуючи плавне регулювання швидкості у доволі широкому діапазоні регулювання.
Функціональна схема ЕП з регулюванням кутової швидкості за допомогою тиристорного регулятора напруги на базі АД з фазним ротором має вигляд поданий на рисунку 7.16.
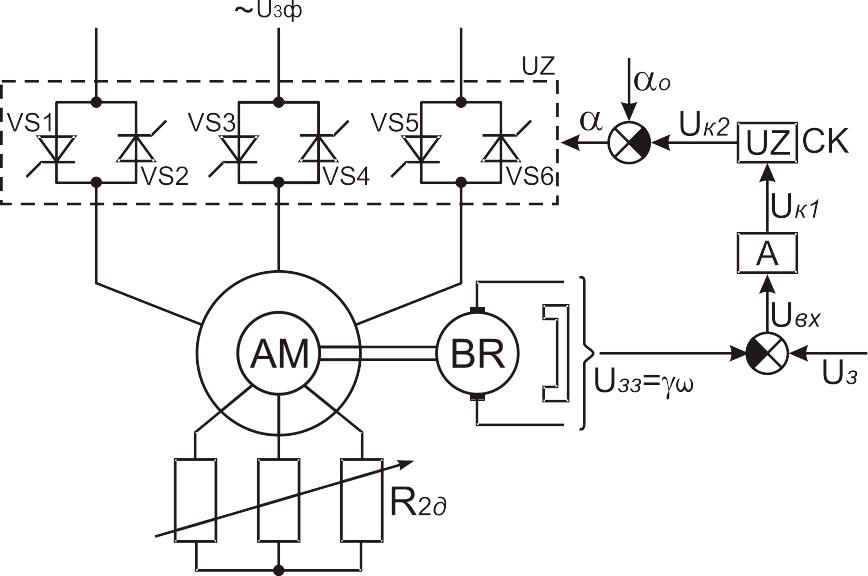
Рисунок 7.16 – Функціональна схема ЕП з регулюванням кутової швидкості за допомогою ТРН.
На схемі прийняті позначення:
~ - напруга живлення ТРН;
- тиристорний регулятор напруги (ТРН);
- система керування ТРН;
![]() - силові тиристори;
- силові тиристори;
- кут керування тиристорами;
![]() - кут відкривання тиристорів при
відсутності сигналу керування
- кут відкривання тиристорів при
відсутності сигналу керування
![]() ;
;
![]() - сигнал керування на вході
(системи керування перетворювача);
- сигнал керування на вході
(системи керування перетворювача);
![]() - сигнал керування на виході
;
- сигнал керування на виході
;
- підсилювач;
![]() - напруга на вході підсилювача
;
- напруга на вході підсилювача
;
![]() - задавальна напруга;
- задавальна напруга;
![]() - тахогенератор (давач швидкості);
- тахогенератор (давач швидкості);
![]() - сигнал (напруга) зворотного зв’язку;
- сигнал (напруга) зворотного зв’язку;
- коефіцієнт передачі тахогенератора
![]() ;
;
![]() - додатковий опір у колі ротора АД.
- додатковий опір у колі ротора АД.
Регулювання напруги на статорі
АД здійснюється ТРН, кут керування
тиристорів
![]() якого змінюється системою керування
перетворювача.
якого змінюється системою керування
перетворювача.
На вхід
подається сигнал керування
від підсилювача
.
Цей сигнал залежить від різниці
задавальної напруги
й напруги негативного зворотного зв’язку
за швидкістю
![]() яка знімається з затискачів тахогенератора
яка знімається з затискачів тахогенератора
![]() .
.
Механічні характеристики АД
можна одержати у межах мінімального та
максимального значень кута керування
тиристорів
![]() .
.
Мінімальний кут керування
тиристорами
![]() дорівнює фазному куту навантаження
(який визначається величиною ковзання,
активного та індуктивного опорів АД й
характером навантаження).
дорівнює фазному куту навантаження
(який визначається величиною ковзання,
активного та індуктивного опорів АД й
характером навантаження).
Максимальний кут керування
тиристорами
![]() для схем, що розглядається, приблизно
дорівнює
для схем, що розглядається, приблизно
дорівнює
![]() .
При такому куті момент, що розвиває АД
як правило менше статичного момента
неробочого ходу двигуна
.
При такому куті момент, що розвиває АД
як правило менше статичного момента
неробочого ходу двигуна
![]() .
.
Таким чином при роботі АД у замкненій системі в міру збільшення його навантаження кут керування повинен зменшуватись від деякого максимального до мінімального. Тому система керування тиристорами повинна виробляти при відсутності сигналу керування імпульси з кутом керування
![]() ,
,
а зі зростанням сигналу
керування в міру зростання навантаження
АД й зменшенням його кутової швидкості
кут
повинен зменшуватись. (При цьому,
максимальному куту керування
відповідає мінімальне значення напруги
живлення двигуна, мінімальному значенню
кута керування
![]() відповідає номінальне значення напруги
живлення статора):
відповідає номінальне значення напруги
живлення статора):
![]() (при
(при
![]() ),
),
![]() (при
(при
![]() ),
),
оскільки
![]() ,
,
![]() .
.
Такий процес у системі керування перетворювачем відбито на рисунку 7.16 вузлом порівняння на виході . У відповідності до нього можна записати
![]() ,
,
![]() ,
,
де
![]() - коефіцієнт підсилення (передатний
коефіцієнт) системи керування
;
- коефіцієнт підсилення (передатний
коефіцієнт) системи керування
;
![]() - коефіцієнт підсилення
(передатний коефіцієнт) підсилювача
.
- коефіцієнт підсилення
(передатний коефіцієнт) підсилювача
.
Використовуючи останнє рівняння можна розрахувати необхідні значення та , що будуть забезпечувати необхідні значення кутової швидкості й жорсткості механічної характеристики.