

7.3.3 Керування пуском дпс у функції струму
Із пускової діаграми (рисунок 7.7) видно, що струм під час пуску коливається у певних межах ( - ). Початковий поштовх струму визначається значенням необхідного пускового момента й допустимого струму для даного двигуна . При підвищенні швидкості струм двигуна зменшується до значення , при цьому частина пускового резистора шунтується, що призводить до збільшення струму до значення .
Струм перемиканням вибирається таким чином, щоб його значення забезпечило необхідне мінімальне прискорення при пуску двигуна з заданим навантаженням, тобто цей струм повинен бути трохи більшим струму, що визначається моментом опору.
Схема автоматичного пуску, що побудована за принципом керування у функції струму, повинна передбачити одно або кілька реле струму, які вмикаються безпосередньо у коло якоря двигуна. Кількість реле залежить від числа пускових ступенів реостата.
Схемотехнічне рішення способу керування пуску у функції струму буде зрозумілим із розгляду спрощеної схеми рисунок 7.10.
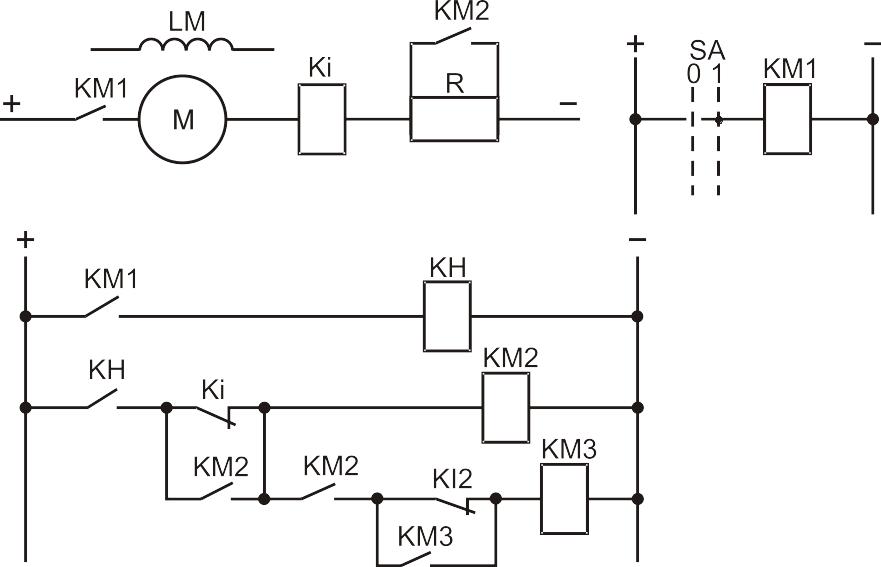
Рисунок 7.10 – Спрощена схема пуску ДПС НЗ у функції струму якоря.
Тут застосоване струмове
реле кутового прискорення
й для спрощення пусковий резистор в
один ступінь. При вмиканні лінійного
контактора
за допомогою командоапарата
![]() одночасно з колом якоря вмикається на
живлення котушки блокувального реле
одночасно з колом якоря вмикається на
живлення котушки блокувального реле
![]() (у колі якоря одержує живлення й котушка
струмового реле
).
(у колі якоря одержує живлення й котушка
струмового реле
).
Контакт розмикається перед вмиканням контакта блокувального реле, тому котушка пускового контактора знеструмлена (його контакт розімкнений і двигун, запускається через резистор ). Контакт блокувального реле не дозволяє, таким чином, пусковому контактору увімкнутися відразу ж після вмиканням лінійного контактора . Струм відпускання струмового реле прискорення дорівнює струму , що призводить до спрацювання пускового контактора , тобто до шунтування пускового резистора . При наступному (другому) кидку струму від до пусковий контактор не відмикається внаслідок того, що контакт струмового реле зашунтований тепер контактом пускового контактора.
Достоїнством способу є те, що перемикання пускового резистора відбувається при заданому значенні струму й не залежить від коливань напруги живлення при пуску.
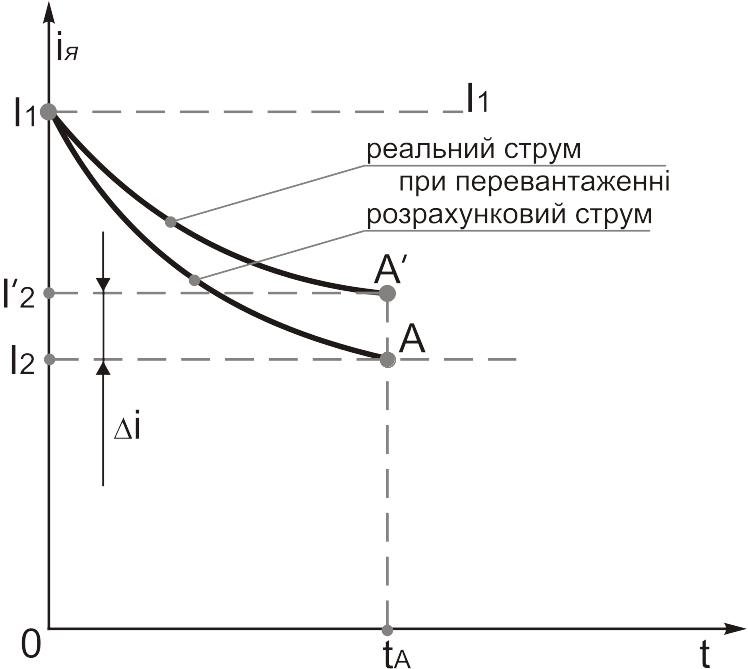
Рисунок 7.11 – Графік змінювання струму при збільшенні навантаження під час пуску.
Одначе, цей спосіб має й вади
(дивись рисунок 7.11). Так, якщо при пуску
двигуна момент навантаження на його
валу за будь-яких причин виявиться вище
розрахункового, то струм
![]() може тривалий час перевищувати значення
на величину
може тривалий час перевищувати значення
на величину
![]() при якому відбувається відпускання
реле струму
,
отже воно не спрацює, а пусковий резистор
виявиться незахищеним (увімкненим),
подальшого розгону двигуна не станеться
(як кажуть, двигун „застряв” на якомусь
пусковому ступені), крім того така
ситуація призводить до перегоряння
резистора, оскільки він розрахований
на короткочасну роботу.
при якому відбувається відпускання
реле струму
,
отже воно не спрацює, а пусковий резистор
виявиться незахищеним (увімкненим),
подальшого розгону двигуна не станеться
(як кажуть, двигун „застряв” на якомусь
пусковому ступені), крім того така
ситуація призводить до перегоряння
резистора, оскільки він розрахований
на короткочасну роботу.
7.3.4 Керування пуском дпс у функції часу
Із пускової діаграми
![]() та
та
![]() ,
(рисунок 7.7) видно, що шунтування ступенів
пускового резистора повинно здійснюватись
через певні проміжки часу:
,
й
,
(рисунок 7.7) видно, що шунтування ступенів
пускового резистора повинно здійснюватись
через певні проміжки часу:
,
й
![]() ,
тобто через
треба зашунтувати перший ступінь
резистора,
– другий,
– третій. Цим й визначається можливість
створення схеми керування пуском у
функції часу.
,
тобто через
треба зашунтувати перший ступінь
резистора,
– другий,
– третій. Цим й визначається можливість
створення схеми керування пуском у
функції часу.
Для цього використовуються різні реле часу, що настроюються на відповідні проміжки часу. Найбільш розповсюджене вживання електромеханічних та електронних реле.
Рисунок 7.12 – Триступінчаста пускова діаграмма для струму якоря при змінюванні навантаження під час пуску.
Необхідна витримка часу кожного реле визначається на основі пускової діаграми, для цього треба із часу пуску, отриманого при розрахунках, відняти власний час вмикання контакторів:
![]()
![]() – контактори постійного струму;
– контактори постійного струму;
![]() – контактори змінного струму.
– контактори змінного струму.
Реле часу керують контакторами прискорення, після закінчення витримки часу, незалежно від того, який струм протікає через двигун й до якої швидкості розігнався якір, відповідний ступень пускового резистора шунтується (рисунок 7.12). За цих умов, якщо двигун під час пуску був перевантажений, то процес пуску буде здійснюватися у відповідності до кривої 2, а якщо двигун під час пуску був недовантажений то процес пуску буде здійснюватися у відповідності до кривої 3.
Порівняно з кривою 1 буде:
середній пусковий момент підвищиться, а час пуску залишиться незмінним (крива 2);
середній пусковий момент зменшиться при незмінному часу пуску (крива 3).
Для того щоб при змінному навантаженні пусковий момент залишився рівним розрахунковому треба відповідно змінювати витримки часу на реле, які б відповідали змінюванню навантаження.
Так якщо пуск здійснюється у відповідності до кривої 2 (перевантаження) витримка часу реально буде
![]() ;
;
![]() ;
;
![]() .
.
Якщо пуск здійснюється у відповідності до кривої 3 (недовантаження), то
![]() ;
;
![]() ;
;
![]() .
.
Достоїнством таких схем є відсутність небезпеки скількись тривалої роботи двигуна на неповній кутовій швидкості (не „застряє” на будь-якому ступені пускового резистора), чого не вдається уникнути в схемах керування у функції швидкості й у функції струму.
Небезпека, що може виникнути при раптовому різкому зростанні навантаження при пуску за будь-яких зовнішніх чи внутрішніх причин, усувається наявністю максимального захисту, за допомогою якої двигун відмикається від мережі.
Простота й надійність у роботі, а також можливість застосування однотипних реле часу при багатоступеневому пуску, призвели до широкого застосування способу керування пуском у функції часу.
В електроприводах постійного струму застосовуються електромагнітні реле часу, доволі простих й надійних у роботі.
Для таких реле часу при двоступеневому пуску ДПТ схема має вигляд, зображений на рисунку 7.13.
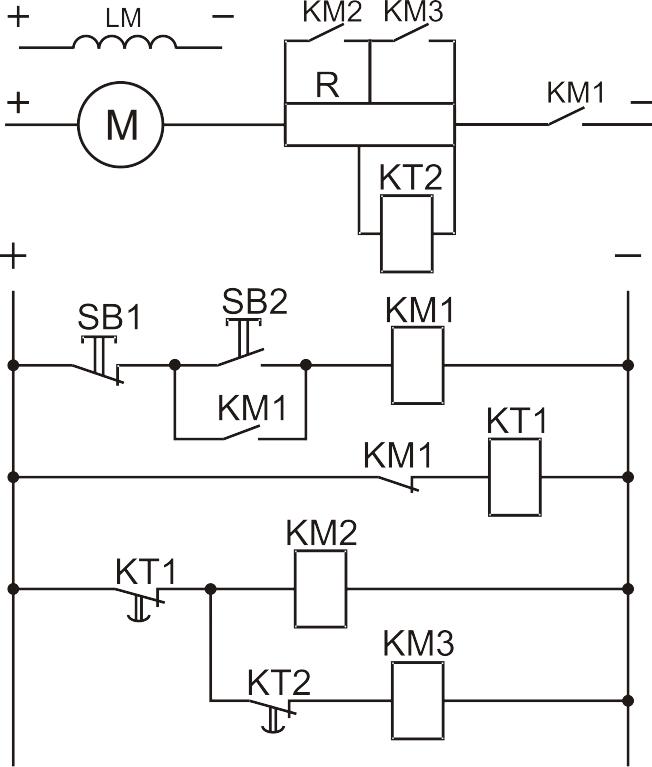
Рисунок 7.13 – Керування пуском ДПС НЗ у функції часу.
Схема має два реле часу
![]() й
й
![]() ,
кожне з яких відраховує час змінювання
кутової швидкості при пуску на відповідному
ступені резистора й вмикає відповідні
контактори прискорення
й
.
Команда на відлік часу кожному реле
часу подається попереднім контактором
при його вмиканні:
,
кожне з яких відраховує час змінювання
кутової швидкості при пуску на відповідному
ступені резистора й вмикає відповідні
контактори прискорення
й
.
Команда на відлік часу кожному реле
часу подається попереднім контактором
при його вмиканні:
- реле контактором ;
- реле
![]() контактором
;
контактором
;
- реле
![]() контактором
(якщо було б три ступеня пускового
резистора) й так далі.
контактором
(якщо було б три ступеня пускового
резистора) й так далі.
Схема працює наступним чином. У початковому стані реле увімкнене, значить його замикальний контакт розімкнений, отже котушки контакторів прискорення й не підімкнені до живлення, а силові контакти цих контакторів й – вимкнені.
Після вмикання лінійного
контактора
(кнопкою
![]() вмикаємо котушку контактора
,
спрацьовує контактор
,
здійснюючи самопідхоплення контактами
,
що шунтують кнопку
)
вмикається його головний контакт
,
у колі якоря й розмикається замикальний
контакт
у колі котушки реле часу
.
вмикаємо котушку контактора
,
спрацьовує контактор
,
здійснюючи самопідхоплення контактами
,
що шунтують кнопку
)
вмикається його головний контакт
,
у колі якоря й розмикається замикальний
контакт
у колі котушки реле часу
.
При цьому обмотка якоря
двигуна
під’єднується до мережі через пусковий
резистор
-
![]() й починається пуск двигуна. При першому
кидку струму за рахунок спаду напруги
на резисторі
вмикається реле
й розмикає свій замикальний контакт
у колі котушки контактора
(другий ступінь пускового резистора
залишається увімкненим).
й починається пуск двигуна. При першому
кидку струму за рахунок спаду напруги
на резисторі
вмикається реле
й розмикає свій замикальний контакт
у колі котушки контактора
(другий ступінь пускового резистора
залишається увімкненим).
Реле , втративши живлення на початку пуску, починає відрахунок часу (який приблизно дорівнює часу роботи двигуна на першому ступені ). Після закінчення цього часу реле спрацьовує й контактом (у колі котушок контакторів й ) вимикає котушку контактора , який своїми силовими контактами у колі якоря двигуна відмикає перший ступінь резистора й замикає накоротко котушку реле часу . Це реле починає відрахунок часу витримки, що дорівнює часу роботи двигуна на другому ступені пускового резистора . Після закінчення цього часу замикається його контакт (у колі котушки контактора ) й вимикаються силові контакти які відмикають (шунтують) другий ступінь резистора.
Достоїнством керування моментом двигуна при пуску у функції часу є незмінність часу пуску при змінюванні збурних дій:
- момента опору;
- момента інерції;
- напруги мережі;
- температури навколишнього
середовища
![]() й таке інше.
й таке інше.
Наприклад, при змінюванні
статичного момента опору
,
двигун змінює величину моментів
перемикання
![]() та
зберігаючи час змінювання швидкості
практично незмінним (дивись рисунок
7.14).
та
зберігаючи час змінювання швидкості
практично незмінним (дивись рисунок
7.14).
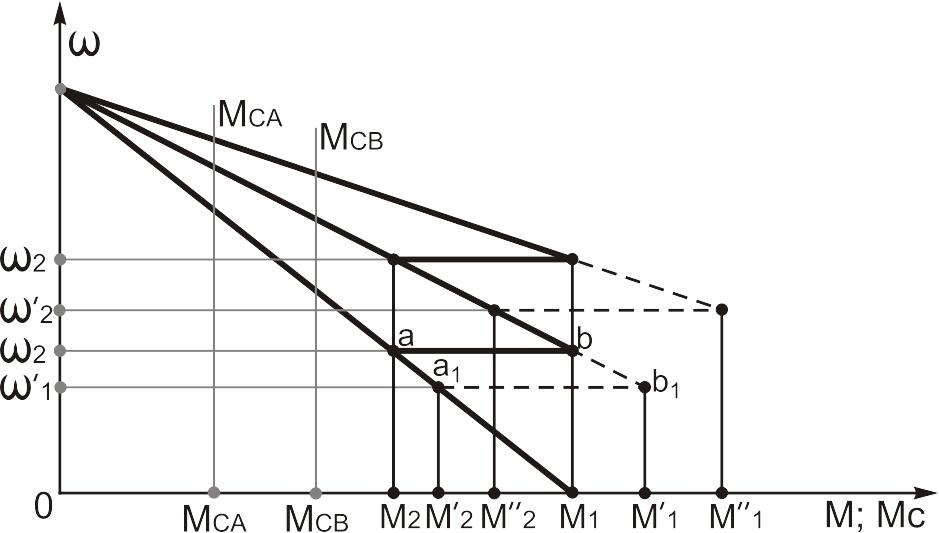
Рисунок 7.14 – Механічні характеристики при змінюванні статичного момента опору.
Якщо
підвищиться від
![]() до
до
![]() ,
то момент перемикання теж збільшиться
відповідно з
до
,
то момент перемикання теж збільшиться
відповідно з
до
![]() з
до
з
до
![]() (якщо вимкнути опір першого ступеня),
тобто точка а
переміститься у а1,
а точка в у
в1.
Це відбувається тому, що при збільшенні
момента опору з
до
,
швидкість двигуна за час (незмінний),
що відраховувало реле
(якщо вимкнути опір першого ступеня),
тобто точка а
переміститься у а1,
а точка в у
в1.
Це відбувається тому, що при збільшенні
момента опору з
до
,
швидкість двигуна за час (незмінний),
що відраховувало реле
![]() зросло не до значення
зросло не до значення
![]() ,
а до значення
причому
<
.
На наступних ступенях моменти перемикання
ще більше зростуть. Так на другому
ступені:
,
а до значення
причому
<
.
На наступних ступенях моменти перемикання
ще більше зростуть. Так на другому
ступені:
![]() ,
а
,
а
![]() ,
,
а загальний час пуску практично не зміниться (не зміниться витримка часу реле і так далі).
Недоліком керування пуском
у функції часу є можливість значного
підвищення струмів та моментів двигуна
при збільшенні
,
,
і зниженні
![]() порівняно з їх розрахунковими значеннями.
порівняно з їх розрахунковими значеннями.
Оскільки зі зростанням процес розгону на першому ступені уповільнюється, до то моменту закінчення часу витримки реле часу швидкість двигуна не досягає значення розрахункової швидкості ( ), а після спрацювання першого контактора прискорення ( ) відбудеться небажаний кидок струму й момента, які можуть перевищити допустимі значення. Передчасне спрацювання контактора вимусить друге реле часу почати також передчасний відрахунок часу, що призведе до передчасного спрацювання другого контактора прискорення й ще більшому кидку струму та момента й так далі. Така ж картина буде спостерігатись і при змінюванні других параметрів ( , , ...).