

6 Вибір електродвигунів
Процедура проектування електропривода починається з обґрунтування вимог до нього й виробу, у відповідності з названими вимогами, ЕП за родом струму та принципом його дії.
На рисунку 6.1 показані основні варіанти ЕП, що одержують живлення від джерел змінного та постійного струмів.
Тут: КВ - керований випростувач, ПЧ – перетворювач частоти, ІП – імпульсний перетворювач.
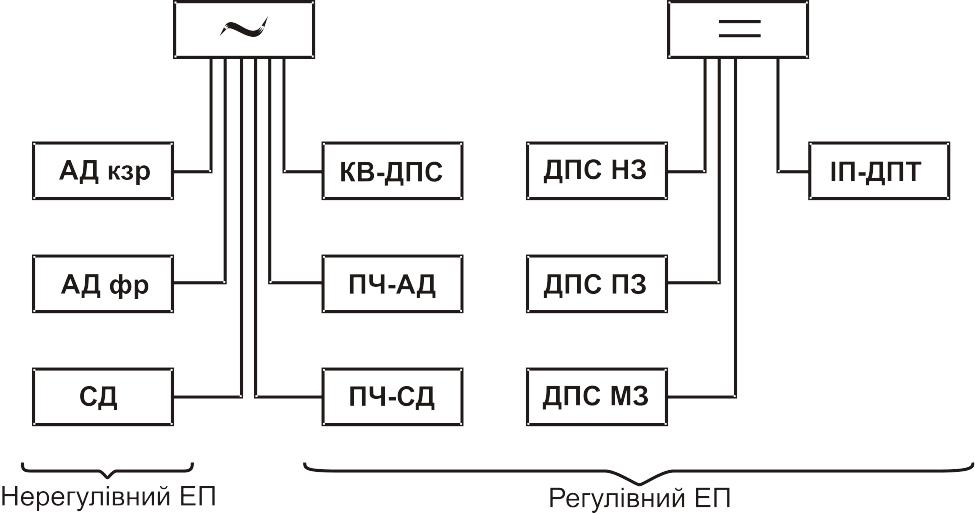
Рисунок 6.1 – До ілюстрації процедури вибору електроприводів.
Перебирання варіантів слід починати з найпростішого. Якщо це нерегулівний ЕП, то з АД кзр, якщо кидки струму, то АД фр, якщо тривало робота без вимикання – СД.
Якщо привод регулівний, то слід починати з основних показників регулювання швидкості (діапазон, характер змінювання момента й допустимий момент й таке інше).
Надійна й економічна робота ЕП можлива тільки при правильному виборі типу й потужності електродвигуна.
Потужність двигуна повинна вибиратися у суворій відповідності до режиму роботи та очікуваного навантаження.
Установлення ЕД надмірної потужності недоцільне із-за невиправданного зростання габаритів ЕД, маси його та початкової вартості. До того ж погіршуються енергетичні характеристики незавантаженої машини (к.к.д, cos ).
При експлуатації навіть вдало вибраного за потужністю ЕД, завжди можуть виникнути короткочасні сплески навантаження, які значно перевершують потужність двигуна. Вони помітно не підвищують нагрівання ЕД, однак у випадку, якщо буде перевершена їх певна межа, нормальний режим буде порушений.
Таким чином при виборі ЕД у першу чергу слід виходити із наступних двох факторів:
- величина миттєвого перевантаження;
- нагрівання.
Вибір ЕД за перевантаженням полягає у визначенні необхідного номінального момента із величини перевантажувальної здатності двигуна
![]()
- перевантажувальна здатність ЕД за моментом.
Використовують також перевантажувальну здатність за струмом
![]() .
.
Перевантажувальна здатність ДПС суттєво залежить від комутації (тобто перевантаження обмежується допустимим іскрінням на колекторі при перевантаженні). Відомо, що іскріння на колекторі є результат відсутності балансу:
![]() ,
,
де
![]() - е.р.с. секції, що комутується;
- е.р.с. секції, що комутується;
![]() - реактив е.р.с.;
- реактив е.р.с.;
![]() - е.р.с комутації, що створюється
потоком додаткових полюсів;
- е.р.с комутації, що створюється
потоком додаткових полюсів;
![]() - трансформаторна е.р.с яка
індукується магнітним потоком головних
полюсів, що міняється.
- трансформаторна е.р.с яка
індукується магнітним потоком головних
полюсів, що міняється.
Величина ДПС тривалого режиму роботи не повинна бути меншою 2,5
![]() .
.
Перевантажувальна здатність
АД обмежується величиною момента при
критичному ковзанні
![]() .
Вона суттєво нижче ніж для ДПС
.
Вона суттєво нижче ніж для ДПС
![]() .
.
З другого боку, момент АД
залежить від
![]() ,
а стандартом допускається зниження
мережної напруги до 90%, тому
для АД слід вважати 0,7 – 0,8 від
заданої при номінальній напрузі.
,
а стандартом допускається зниження
мережної напруги до 90%, тому
для АД слід вважати 0,7 – 0,8 від
заданої при номінальній напрузі.
Перевантажувальна здатність СД найвища і складає =3 – 3,5.
Номінальна потужність ЕД обмежується їх нагріванням, тобто, у решті – решт, нагрівостійкістю ізоляційних матеріалів, що застосовуються,тобто класом ізоляції (Y, A, E, B, F, H, C). Так клас ізоляції А має межову температуру нагрівання 105С, а клас ізоляції С – вище 180С.
Як показує досвід вивчення навантажувальної спроможності ЕД, навіть незначне перевищення температури ізоляції над допустимою значно скорочує термін служби ЕД.
Крім основних факторів перевантаження та нагрівання, слід звернути увагу ще й на такі фактори.
Способи вентиляції й захисту від дії навколишнього середовища.
Від правильного вибору двигуна за цим фактором залежить довготривалість роботи двигуна, надійність й безпечність його обслуговування.
За способом вентиляції двигуна розрізняють двигуни з природною вентиляцією, з самовентиляцією та незалежною (примусовою) вентиляціями.
Якщо вибраний двигун має самовентиляцію а швидкість його може регулюватися униз від основної, то постає питання про ефективність охолодження на низьких швидкостях.
За захистом від дії на двигун навколишнього середовища двигуни розрізняють на:
- відкритого виконання;
- захищеного виконання;
- закрите виконання;
- герметичне виконання.
Захищене виконання у свою чергу поділяється на:
- краплезахищене (захищає від попадання у середину крапель, що попадають на оболонку двигуна вертикально, або під кутом не більше 60 до вертикалі);
- бризкозахищене (захищає від попадання у середину крапель та бризк, які попадають на оболонку двигуна у будь-якому напрямку).
Герметичного виконання двигуни працюють зануреними у воду. Їх різновид є водозаглибне виконання – двигун працює зануреним у воду під гідростатичним тиском.
Конструктивне виконання у відповідності до умов його компоновки з виробничим механізмом.
Бувають, наприклад, такі виконання як:
- один чи два вихідних кінця вала;
- форма вихідного кінця вала (циліндрична, конічна й таке інше);
- спосіб з’єднання вала (шпонка, шліц й таке інше);
- спосіб монтажу (двигун на лапах, фланцевий й таке інше).
При виборі електродвигуна слід мати на увазі не тільки усталені режими його роботи, але й перехідні, тобто пуск, реверс, регулювання швидкості й гальмування. З цією метою будуються так звані навантажувальні діаграми:
![]() .
.
Враховуючи вищевикладене, необхідно відмітити, що у кожному конкретному випадку, двигун, вибраний у відповідності до заданої навантажувальної діаграми, повинен бути повністю завантажений і при цьому працювати не перегріваючись поверх допустимих меж. У рівній мірі він повинен забезпечити нормальну роботу при можливих короткочасних перевантаженнях і при відповідних пускових характеристиках.