

5.2 Класифікація виконавчих механізмів у залежності від характеру дії статичного момента опору (мс)
Навіть при самому більшому спрощенні при розгляді перехідних режимів (знехтуванні електромагнітними й тепловими режимами), коли враховується тільки електромеханічний перехідний процес, розглядається система диференційних рівнянь, куди входять рівняння рівноваги напруги й рівняння руху.
Таким чином, рівняння руху є одним з двох основних рівнянь, які описують протікання перехідного процесу, а його складовою, що суттєво впливає на характер руху, є статичний момент опору , який для різних виконавчих механізмів проявляється по різному.
Основними факторами, від яких залежить величина , є швидкість, шлях, час, особливості технологічного процесу виконавчих механізмів.
В залежності від характеру усі виконавчі механізми умовно можна поділити на 5 класів.
1-й клас. До цього класу належать виконавчі механізми з незмінним статичним моментом
![]() ,
,
такі, як вантажо-піднімальні механізми, прокатні стани, розвантажувально-навантажувальні роботи, стругальні верстати.
2-й клас. До цього класу належать виконавчі механізми, у яких залежить від швидкості v
MС=f(v).
Ця залежність може бути незначною, або значною, лінійною, або нелінійною. Момент може залежати від швидкості у степені 0-2, а для дуже швидкохідних машин – навіть 3-4. до цього класу належать виконавчі механізми з вентиляторною характеристикою (відцентрові насоси, вентилятори, компресори, центрифуги, гребні гвинти, оброблювальні верстати).
3-й клас. До цього класу належать механізми, у яких залежить від шляху (від кута повороту у обертальних приводів)
![]() ,
,
це виконавчі механізми у механічній частині яких наявні такі перетворювальні ланки, як кривошипно-важільні механізми, ексцентриковий механізм, кулісний механізм, кулачковий механізм і таке інше (ножиці, преси, кантувачі, щокові дробарки, поршневі та інші машини). Для багатьох таких виконавчих механізмів функцію важко задати аналітично, тоді вона задається графічно.
4-й клас.
До цього класу належать механізми,
яких одночасно залежить й від швидкості
![]() й від шляху
й від шляху
MC=f(v, ),
такі як рейковий транспорт (електровози, тепловози, трамваї), привод розвідних мостів, привод стернових пристроїв й таке інше. Наприклад, рух рейкового екіпажу під кутом або на кривих. Тут залежність від швидкості – тертя в осях, тертя по рейкам, а залежність від шляху – рух по схилу, рух на повороті й інше.
5-й клас.
До цього класу належать механізми,
статичний момент опору яких є функцією
часу
![]()
![]() ,
,
такі, які працюють під дією збурної сили, що змінюється у часі за періодичним законом, або стежний привод. До цього класу також належать виконавчі механізми, у яких залежить від часу в силу властивостей оброблювального матеріалу, або характеру технологічного процесу. Збурна сила при цьому несе випадковий характер (кульові млини, чесальні машини, шліфувальні верстати, дробарки й таке інше).
5.3 Пуск дпс нз до основної швидкості при одному ступені пускового реостата
Перехідний процес пуску ДПС НЗ до основної кутової швидкості відбувається у випадку живлення двигуна від мережі постійного струму при вмиканні у коло якоря лінійного контактора КМ, дивись рисунок 5.1.
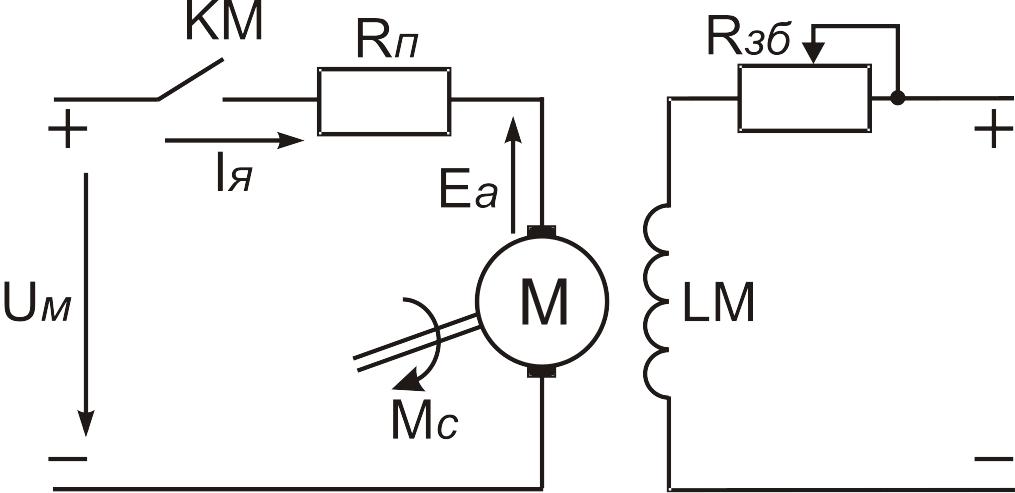
Рисунок 5.1 – Схема пуску з ввімкнутим на весь час пуску пусковим реостатом.
У наведеній схемі на увесь
час пуску постійно увімкнений резистор
![]() (пусковий реостат), отже загальний опір
якірного кола буде
(пусковий реостат), отже загальний опір
якірного кола буде
![]() .
.
Хай виконавчий механізм , на який працює ДПС НЗ буде 1-го класу , отже
.
Для спрощення будемо вважати, що відбувається тільки електромеханічний перехідний процес (електромагнітним перехідним процесом нехтуємо), отже індуктивність якоря відсутня
![]() .
.
Будемо вважати, що джерело живлення якірного кола має значну потужність, отже
![]() .
.
Будемо також вважати, що ДПС НЗ скомпенсований (усунено реакцію якоря), тоді магнітний потік під час пуску не змінюється, тобто
![]() .
.
З урахуванням цих спрощуючих припущень рівняння рівноваги при пуску будуть мати вигляд:
- рівняння рівноваги напруги
![]() ;
(5.1)
;
(5.1)
- рівняння руху
![]() .
(5.2)
.
(5.2)
У рівняннях (5.1) й (5.2) складові їх мають такі значення.
ЕРС якоря:
![]() ,
[В]
,
[В]
де
![]() [
[![]() ].
].
Динамічний момент:
![]() ,
,
![]()
де
![]() –момент інерції, [кг.м2],
–момент інерції, [кг.м2],
![]() - кутове прискорення, [с-2].
- кутове прискорення, [с-2].
Момент двигуна:
![]() ,
[Н.м].
,
[Н.м].
З урахуванням цих позначень, із рівняння (5.2) визначимо значення струму якоря й підставимо його в рівняння (5.1)
![]()
![]() (5.3)
(5.3)
![]() ,
,
![]() .
.
Поділимо останнє рівняння
на
(![]() )
)
![]() .
(5.4)
.
(5.4)
Уведемо такі позначення
![]() - швидкість ідеального
неробочого ходу; [
- швидкість ідеального
неробочого ходу; [![]() ];
];
![]() - електромеханічна стала
часу, [с];
[
- електромеханічна стала
часу, [с];
[![]() ];
];
![]() - перепад швидкості при
навантаженні двигуна статичним моментом
навантаження
- перепад швидкості при
навантаженні двигуна статичним моментом
навантаження
![]() (характеристика 2, дивись рисунок 5.2);
(характеристика 2, дивись рисунок 5.2);
![]() .
.
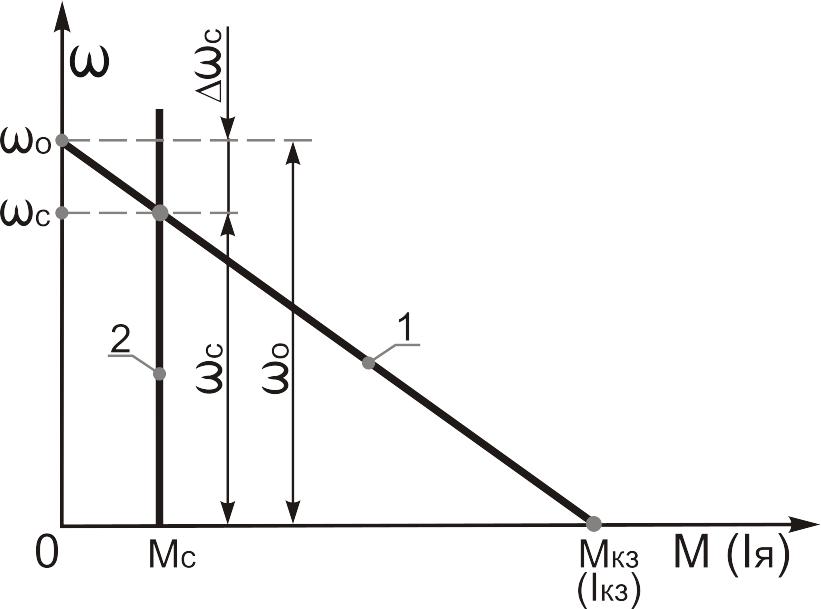
Рисунок 5.2 – Пускова статична характеристика.
У свою чергу електромеханічна
стала часу
![]() через момент короткого замикання
можна записати:
через момент короткого замикання
можна записати:
![]() ,
,
тобто
![]() (5.5)
(5.5)
Це досить легко довести:
![]() ,
,
оскільки
![]()
![]()
оскільки
![]()
![]() ,
або
,
або
![]() (5.6)
(5.6)
Співвідношення (5.6), одержані із розгляду фізичної суті початкового пускового момента, підтверджують написане рівняння (5.5).
Із виразу (5.5) можна сформулювати фізичну суть електромеханічної сталої часу:
Електромеханічною сталою часу називають час, на протязі якого ЕП, що має момент інерції , розгониться без навантаження із нерухомого стану до швидкості ідеального неробочого ходу (характеристика 1) при незмінному моменті двигуна, що дорівнює моментові короткого замикання двигуна (дивись рисунок 5.2).
Із (5.5) випливає, що величина
![]() не залежить від навантаження
,
а залежить від
не залежить від навантаження
,
а залежить від
![]() .
Зі зростанням
зменшується
,
отже збільшується стала
.
.
Зі зростанням
зменшується
,
отже збільшується стала
.
З урахуванням (5.3), (5.4) та прийнятих позначень, рівняння (5.1) та (5.2) можна подати у такому вигляді
![]() ,
(5.7)
,
(5.7)
![]() ,
(5.8)
,
(5.8)
де
![]() .
.
Рішення рівнянь (5.7) й (5.8)
відносно
![]() та
(які тут не наводяться) показують, що
зменшення струму під час пуску (фрагмент
а рисунку
5.3) й збільшення швидкості (фрагмент б)
ДПС НЗ у функції часу являють собою
прості експоненти.
та
(які тут не наводяться) показують, що
зменшення струму під час пуску (фрагмент
а рисунку
5.3) й збільшення швидкості (фрагмент б)
ДПС НЗ у функції часу являють собою
прості експоненти.
Теоретично процес пуску закінчується за нескінченно довгий час, проте практично можна вважати, що процес пуску завершується при
![]() ,
,
оскільки кутова швидкість у цьому випадку відрізняється від свого усталеного значення не більш, ніж на (5 – 2)%.
Таким чином, через час
![]() після пуску швидкість установлюється
практично усталеною, процес пуску можна
вважати завершеним.
після пуску швидкість установлюється
практично усталеною, процес пуску можна
вважати завершеним.
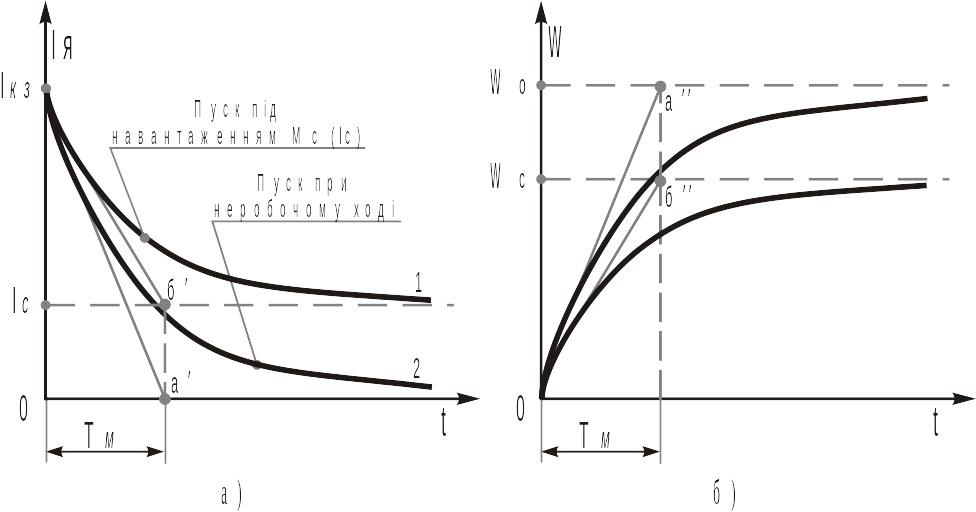
а – експоненти затухання струму якоря;
б - експоненти зростання кутової швидкості.
Рисунок 5.3 – Графіки змінювання струму і швидкості при пуску.
Якби пуск здійснювався весь
час під дією момента
,
то кутова швидкість змінювалась би в
часу по прямій
![]() (при пуску двигуна
без навантаження) й по прямій
(при пуску двигуна
без навантаження) й по прямій
![]() – при пуску під навантаженням, рисунок
5.3, фрагмент б.
Отже, якщо провести через початок
координат дотичну до кривої 2 до перетину
з горизонталлю, що проходить через точку
,
то одержаний відрізок
– при пуску під навантаженням, рисунок
5.3, фрагмент б.
Отже, якщо провести через початок
координат дотичну до кривої 2 до перетину
з горизонталлю, що проходить через точку
,
то одержаний відрізок
![]() дає у масштабі величину електромеханічної
сталої
(теж саме можна визначити, якщо з початку
координат провести дотичну до кривої
1 до перетину з горизонталлю, що проходить
через точку
дає у масштабі величину електромеханічної
сталої
(теж саме можна визначити, якщо з початку
координат провести дотичну до кривої
1 до перетину з горизонталлю, що проходить
через точку
![]() ).
).
У першому випадку був неробочий хід, а у другому – робота під навантаженням – залишилась без змін.
Аналогічні міркування й при
визначенні електромеханічної сталої
графічним шляхом з графіків струму.
Тільки у цьому випадку дотичну слід
проводити (до кривих 1 чи 2) з точки
![]() ,
рисунок 5.3, фрагмент а.
,
рисунок 5.3, фрагмент а.