

4.5.4 Регулювання координат ад змінюванням напруги живлення статора
Одним з можливих способів регулювання координат АД є змінювання напруги живлення обмотки статора без змінювання частоти.
Для реалізації цього способу між мережею живлення й АД розташовується перетворювач напруги, наприклад, ТРН – тиристорний регулятор напруги, для змінювання величини напруги у відповідності до сигнала керування , що підводиться до статорного кола, рисунок 4.34.
При такому регулюванні
синхронна кутова швидкість та критичне
ковзання залишаються незмінними при
зменшенні напруги, жорсткість механічних
характеристик падає. Це не кращий спосіб
регулювання швидкості, бо зі зменшенням
напруги діапазон регулювання змінюється
мало, проте суттєво зменшуються
максимальний та поточний моменти двигуна
(з огляду на те, що
![]() ),
а отже і його перевантажувальна здатність
(дивись штучні характеристики 1-3, рисунок
4.35), натомість цей спосіб більш доцільний
при регулюванні інших координат АД,
наприклад, момента і струму.
),
а отже і його перевантажувальна здатність
(дивись штучні характеристики 1-3, рисунок
4.35), натомість цей спосіб більш доцільний
при регулюванні інших координат АД,
наприклад, момента і струму.
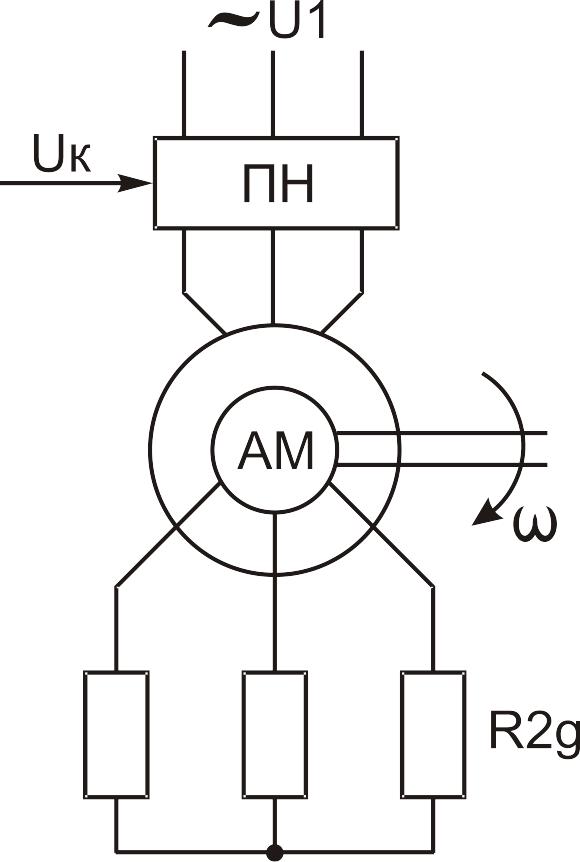
Рисунок 4.34 – Схема живлення АД з регулятором напруги.
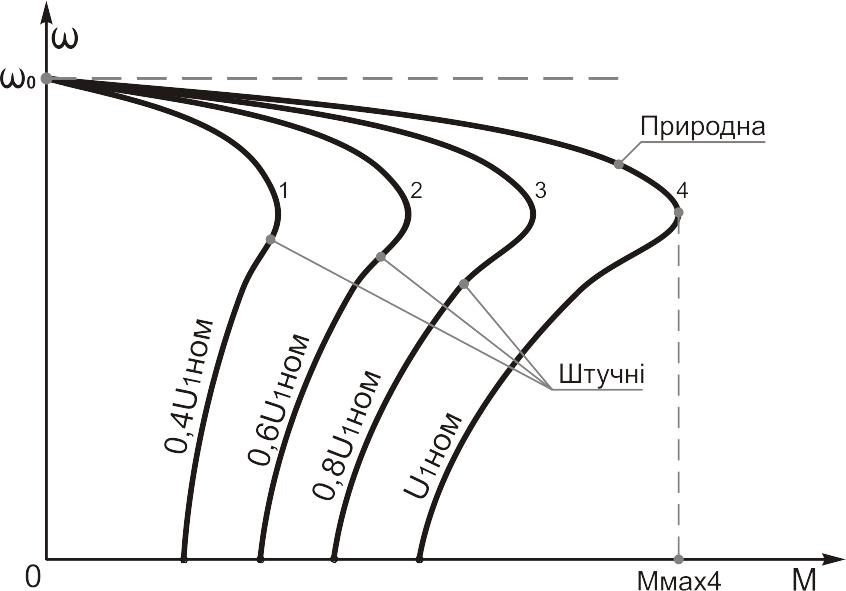
Рисунок 4.35 – Механічні характеристики АД при зменшенні напруги живлення.
4.5.5 Частотне регулювання ад
Частотний спосіб регулювання швидкості АД у різних його різновидах є одним із найрозповсюджених. Суть способу витікає з відомої залежності для синхронної швидкості
![]() ,
,
звідки видно, що кутова швидкість 0 змінюється не тільки при змінюванні числа пар полюсів р, але й при змінюванні частоти живлення.
Цей спосіб має найкращі
показники регулювання швидкості
порівняно з іншими способами. Єдиним
стримуючим фактором тут є висока, поки
що, вартість перетворювача частоти
живлення. Цей спосіб забезпечує плавне
регулювання швидкості у широкому
діапазоні, а одержані статичні
характеристики мають високу жорсткість.
Частотний спосіб має таку важливу
властивість як сталість ковзання при
регулювання швидкості (цього немає при
реостатному регулювання). За цієї
обставини втрати ковзання (![]() )
незначні, тобто спосіб економічний.
)
незначні, тобто спосіб економічний.
Для кращого використання
АД, одержання високих енергетичних
характеристик (
,
ККД та перевантажувальної здатності),
одночасно зі змінюванням частоти
живлення
![]() слід і змінювати й величину напруги
живлення
.
Закон змінювання напруги при цьому
залежить від характеру момента
навантаження.
слід і змінювати й величину напруги
живлення
.
Закон змінювання напруги при цьому
залежить від характеру момента
навантаження.
Якщо при виборі співвідношення між та виходити з міркувань підтримки постійності момента навантаження (перший клас механізмів) при регулювання швидкості, то при цьому слід зберігати незмінним магнітний потік.
Із формули Капа (визначає величину ЕРС для гармонічного закону змінювання струму)
![]() ,
,
де – частота змінного струму;
– магнітний потік;
![]() – число витків обмотки
статора;
– число витків обмотки
статора;
![]() – обмоточний коефіцієнт;
– обмоточний коефіцієнт;
– фазна напруга,
випливає закон змінювання напруги й частоти
![]() (формула Костенка).
(формула Костенка).
Для механізмів третього класу (з вентиляторним моментом навантаження) цей закон має бути:
 .
.
Для механізмів четвертого класу ( зменшується нелінійно при збільшенні швидкості) цей закон має бути:
![]() .
.
Механічні характеристики АД для закону регулювання подані на рисунку 4.36.
Для частот регулювання
![]() максимальний момент
практично постійний (збереження високої
перевантажувальної здатності
максимальний момент
практично постійний (збереження високої
перевантажувальної здатності
![]() ).
).
Для частот регулювання
![]() ,
коли напруга
не можна збільшуватись із-за насичення
магнітної системи і практично залишається
незмінною, рівною
,
коли напруга
не можна збільшуватись із-за насичення
магнітної системи і практично залишається
незмінною, рівною
![]() ,
максимальний момент двигуна знижується.
,
максимальний момент двигуна знижується.
Зауваження. Вищенаведені висновки одержані у знехтуванні активних опором обмотки статора. Це припущення не зовсім коректне при малих частотах, коли зменшується індуктивний опір і зростає відносний активний опір. Падіння напруги на ньому потребує зменшення напруги у менший мірі, ніж це вимагає співвідношення .
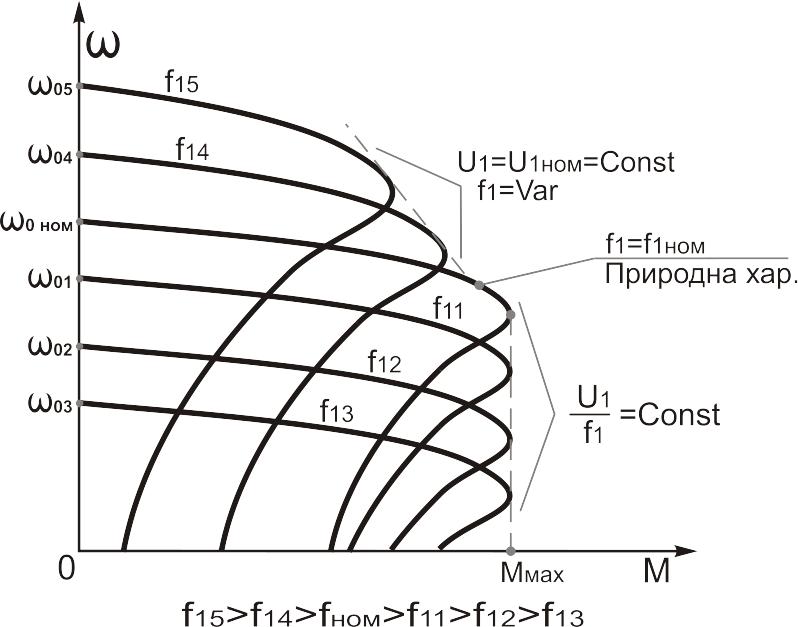
Рисунок 4.36 – Механічні характеристики АД при частотному регулюванні.
Слід відзначити, що частотне регулювання, особливо останнім часом застосовується й для регулівного синхронного ЕП. Необхідним елементом ЕП при частотному керуванні є перетворювач частоти (і напруги).
Різні види перетворювачів частоти, які знайшли застосування при частотному регулюванні, можна поділити на дві групи:
- статичні перетворювачі, які мають найбільш широке застосування;
- електромеханічні перетворювачі на базі звичайних, або спеціальних електричних машин, раніш вони мали широке розповсюдження, але й зараз ще знаходяться в експлуатації, особливо в потужних та деяких спеціальних ЕП.
Електромашинні перетворювачі
Схема чотиримашинного
перетворювача побудована на базі
синхронного генератора
![]() й системи Г – Д, рисунок 4.37.
й системи Г – Д, рисунок 4.37.
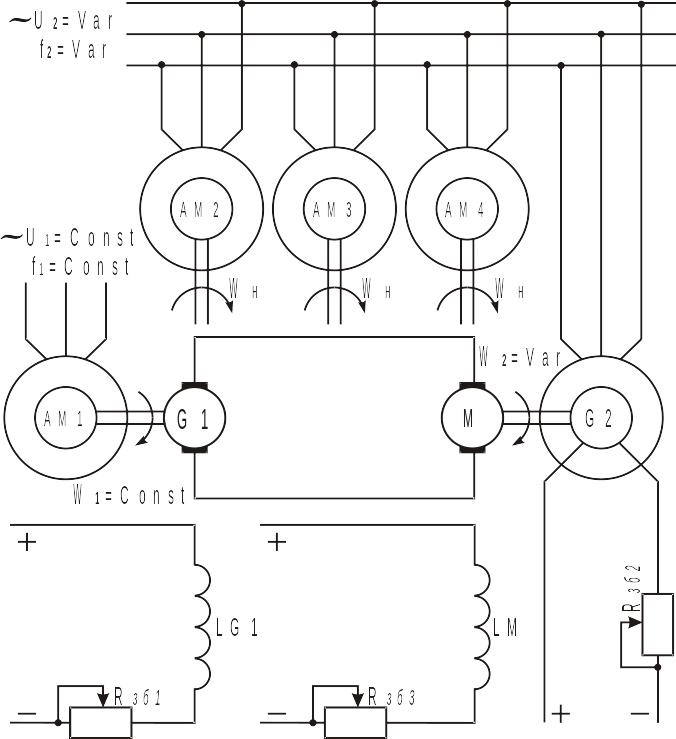
Рисунок 4.37 – Електромашинний перетворювач частоти для живлення АД (АМ2-АМ4).
Система Г - Д складається з
ГПС
![]() та ДПС
незалежного збудження. Приводом
генератора
є асинхронний нерегулівний двигун
,
який живиться від стандартної мережі
змінного струму. Двигун
регулівний є приводом синхронного
генератора
– джерела регулівної частоти й напруги.
та ДПС
незалежного збудження. Приводом
генератора
є асинхронний нерегулівний двигун
,
який живиться від стандартної мережі
змінного струму. Двигун
регулівний є приводом синхронного
генератора
– джерела регулівної частоти й напруги.
Регулювання частоти
перетворювача здійснюється регулюванням
швидкості
генератора
двигуном
.
Регулювання швидкості двигуна
двозонне: вниз від основної напруги
генератора
(резистором
![]() змінюється струм збудження, а значить
і потік
);
уверх від основної за рахунок ослаблення
поля двигуна
(резистором
змінюється струм збудження, а значить
і потік
);
уверх від основної за рахунок ослаблення
поля двигуна
(резистором
![]() змінюється струм збудження двигуна
).
Величина напруги
змінюється струм збудження двигуна
).
Величина напруги
![]() у відповідному відношенні до частоти
регулюється змінюванням магнітного
потоку генератора
за рахунок регулювання струму його
обмотки збудження резистором
у відповідному відношенні до частоти
регулюється змінюванням магнітного
потоку генератора
за рахунок регулювання струму його
обмотки збудження резистором
![]() .
.
Таким чином, система є
чотиримашинним перетворювачем, на вхід
якого подається нерегулівна змінна
напруга промислової частоти (~![]() ;
;
![]() ),
а на виході маємо регулівну змінну
напругу (~
),
а на виході маємо регулівну змінну
напругу (~![]() ;
;
![]() )
для живлення АД (
)
для живлення АД (![]() ;
;
![]() ;
;
![]() ;...),
швидкість навантаження яких
;...),
швидкість навантаження яких
![]() слід регулювати.
слід регулювати.
Така система знаходить застосування, наприклад, у багатодвигуневому приводі прокатних станів, де велика кількість валків стана одночасно є і опорними і приводними (з вмонтованими в них АД). Живлення цих (вбудованих) АД від розглянутого перетворювача забезпечить регулювання швидкості багатодвигуневого ЕП.
Вади перетворювача, як електромашинної системи, аналогічні розглянутим у пункті 4.3.4. Слід додати, що у цьому випадку установлена потужність у 4 рази перевищує потужність ЕП, а перемножування ККД чотирьох обертових машин у кращому випадку дасть загальний ККД біля 66%.
Переваги перетворювача аналогічні розглянутим у пункті 4.3.4. Слід додати наступне:
- можливість просто здійснювати нарізне (роздільне) регулювання напруги й частоти;
- можливість
просто здійснити
автоматичне підтримання
![]() ;
;
- при завеликих потужностях використання статичного перетворювача може бути проблематичним (велика вартість, або взагалі не випускається, або не задовольняє якість, не відповідають параметри й таке інше), а електромашинний перетворювач можна скласти у виробничих умовах, використовуючи стандартне електрообладнання й апаратуру.
Але для частотного регулювання ЕП у більшості випадків використовують статичні перетворювачі.
Статичні перетворювачі частоти (СПЧ)
Як уже зазначалось, широке розповсюдження останнім часом СПЧ завдячено створенню потужних силових тиристорів та транзисторів, успіхом мікроелектроніки та мікропроцесорної техніки. Сучасні СПЧ с мікропроцесорним керуванням, високим ККД та великою швидкодією – це основні чинники запровадження силових СПЧ.
СПЧ можна поділити на дві групи:
- перетворювачі з безпосереднім зв’язком мережі живлення й навантаження;
- перетворювачі з проміжною ланкою постійного струму.
Перетворювачі з безпосереднім зв’язком
Такі СПЧ використовуються для живлення АД на низьких частотах (10 Гц та нижче) при промисловій частоті живлення 50 Гц.
Спрощена схема такого перетворювача наведена на рисунку 4.38.
Силова частина тиристорного
перетворювача складається з узгоджуючого
трансформатора
та двох груп тиристорів на кожну фазу
(
на фазу
).
Система керування -
.
Розглянемо принцип дії на прикладі фази
.
Величина вихідної напруги
![]() й частота
й частота
![]() залежать від режиму роботи двох груп
тиристорів
залежать від режиму роботи двох груп
тиристорів
![]() та
.
та
.
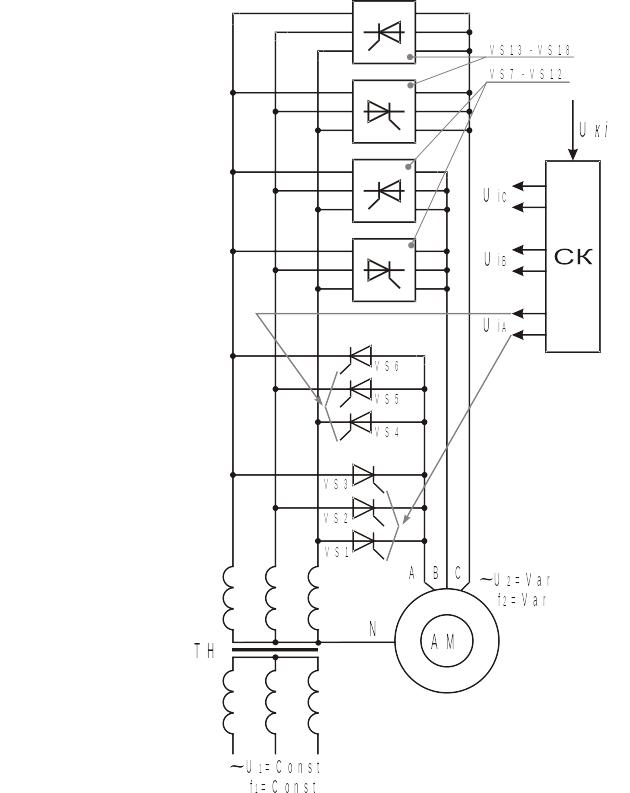
Рисунок 4.38 – Спрощена схема перетворювача частоти з безпосереднім зв’язком мережі живлення й навантаження.
Частота залежить від часу
роботи тиристорних груп (період коливань
![]() напруги
визначається часом роботи кожного
тиристора додатної та від’ємної півхвиль
вхідної напруги
з періодом
напруги
визначається часом роботи кожного
тиристора додатної та від’ємної півхвиль
вхідної напруги
з періодом
![]() ),
дивись рисунок 4.39.
),
дивись рисунок 4.39.
Час ![]() - пауза проміж вимиканням однієї
тиристорної групи й вмиканням другої.
Вона може регулюватися й може дорівнювати
нулю:
- пауза проміж вимиканням однієї
тиристорної групи й вмиканням другої.
Вона може регулюватися й може дорівнювати
нулю:
![]() – дискретне регулювання,
– дискретне регулювання,
![]() – плавне регулювання.
– плавне регулювання.
Величина
![]() регулюється зміною величини кута
керування
.
регулюється зміною величини кута
керування
.
Отримання на навантаженні
трифазної вихідної напруги зі зсувом
фаз на третину періоду досягається тим,
що керуючі імпульси на тиристорних
групах
![]() ,
,
![]() ,
,
![]() подаються зі зсувом на третину періоду
вихідної напруги у відповідності з
сигналами керування
подаються зі зсувом на третину періоду
вихідної напруги у відповідності з
сигналами керування
![]() ,
рисунок 4.38.
,
рисунок 4.38.
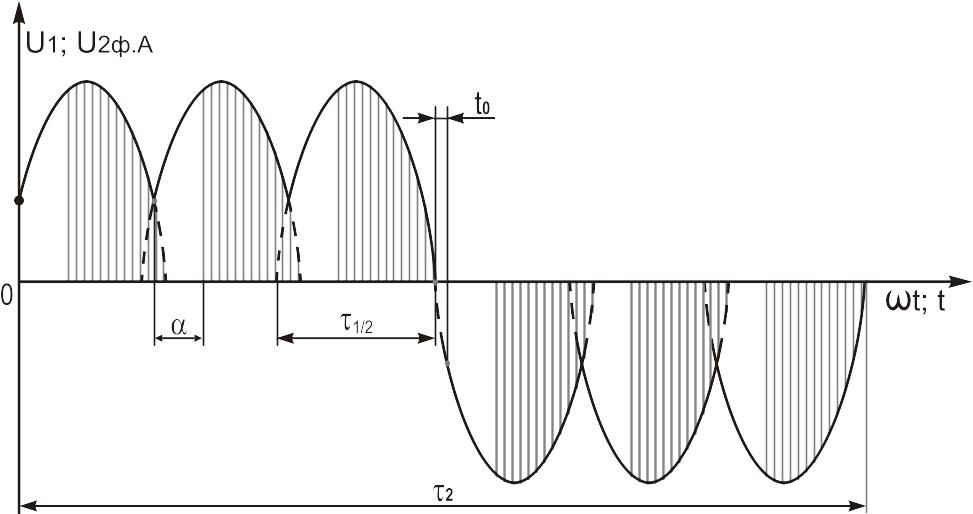
Рисунок 4.39 – Отримання
вихідної напруги
![]() фази А при трифазній вхідній напрузі
.
фази А при трифазній вхідній напрузі
.
Певним недоліком схеми є наявність на навантаженні нульового проводу , та обмежений діапазон регулювання.
Цих недоліків позбавлені перетворювачі з проміжною ланкою постійного струму, які знайшли значно ширше розповсюдження.
Перетворювачі з проміжною ланкою постійного струму
Силова частина такого
перетворювача являє собою послідовно
увімкнені статичний перетворювач
змінного струму у постійний
![]() й статичний перетворювач постійного
струму у змінний
й статичний перетворювач постійного
струму у змінний
![]() .
.
Перетворювач
являє собою керований випростувач
![]() ,
величина випростаної напруги
,
величина випростаної напруги
![]() якого регулюється шляхом змінювання
кута керування
тиристорів випростувача
за допомогою системи керування
якого регулюється шляхом змінювання
кута керування
тиристорів випростувача
за допомогою системи керування
![]() .
.
Перетворювач
являє собою керований інвертор
![]() ,
частота вихідної змінної напруги
якого регулюється шляхом змінювання
частоти комутації
,
частота вихідної змінної напруги
якого регулюється шляхом змінювання
частоти комутації
![]() тиристорів інвертора
за допомогою системи керування
тиристорів інвертора
за допомогою системи керування
![]() (рисунок 4.40).
(рисунок 4.40).
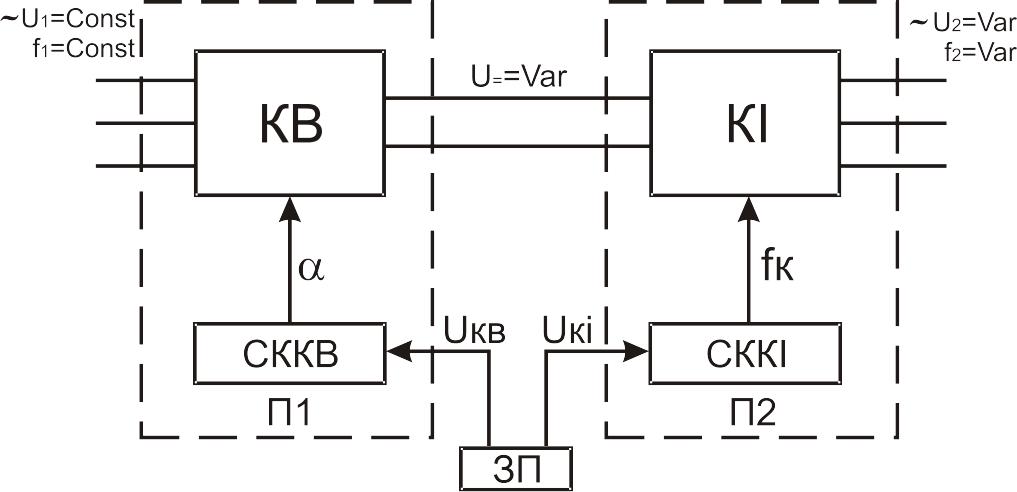
Рисунок 4.40 – Структурна схема СПЧ з проміжною ланкою постійного струму між мережою живлення й навантаженням.
Керуючі сигнали
![]() й
подаються у відповідні системи керування
від задавального пристрою
.
й
подаються у відповідні системи керування
від задавального пристрою
.
Таким чином амплітуда напруги ~ регулюється на , а частота – на .
Принцип дії був розглянутий при вивченні статичних перетворювачів для живлення ДПС від мережі змінного струму (пункт 4.3.4).
Принцип одержання регулівної частоти можна пояснити на схемі, яка складається з трифазного навантаження , з’єднаного у зірку, та шести тиристорів , з’єднаних у мостову схему, фрагмент а рисунка 4.41.
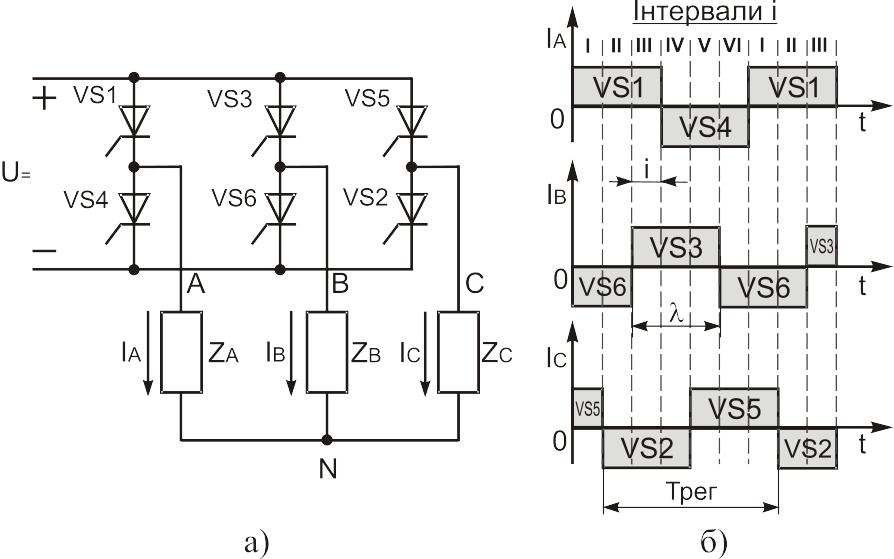
а – схема;
б – часові струмові діаграми.
Рисунок 4.41 – До пояснень принципу одержання регулівної частоти інвертора.
За допомогою системи керування інвертором ці тиристори можуть відкриватися у необхідній послідовності й на будь-який відрізок часу.
При інвертуванні найчастіше
використовують тривалість відкритого
стану тиристора
на половину (![]() ),
або на третину (
),
або на третину (![]() )
періоду
)
періоду
![]() регулівної частоти
,
фрагмент б
рисунка 4.41.
регулівної частоти
,
фрагмент б
рисунка 4.41.
У наведеному фрагменті .
Зсув моменту відкриття тиристорів VS1 – VS6 складає шосту частину періоду регулівної частоти
![]() ,
,
тобто інтервал між моментами відкриття тиристорів складає
![]() .
.
Часові струмові діаграми
роботи тиристорів (рисунок 4.41, фрагмент
б)
наведені для трьох фаз навантаження.
Тут струми фаз
![]() ,
,
![]() ,
,
![]() ,
які проходять через непарні тиристори
,
які проходять через непарні тиристори
![]() ,
,
![]() ,
,
![]() відкладені у додатньому напрямку, а
через парні тиристори
відкладені у додатньому напрямку, а
через парні тиристори
![]() ,
,
![]() ,
,
![]() – у від’ємному. Як видно з діаграми, у
кожний момент часу виявляються увімкнені
три тиристори з шести, причому за час
періоду
є шість інтервалів (
– у від’ємному. Як видно з діаграми, у
кожний момент часу виявляються увімкнені
три тиристори з шести, причому за час
періоду
є шість інтервалів (![]() )
різних сполучень відкритих і закритих
станів тиристорів.
)
різних сполучень відкритих і закритих
станів тиристорів.
У відповідності до цих станів тиристорів, величини й напрямку постійної напруги та опору фаз навантаження , на цьому навантаженні буде стандартна система трифазної напруги змінного струму, але не синусоїдальної форми.
У залежності від способу комутації струмів тиристорів інвертори поділяються на два типи:
інвертори ведені мережею;
автономні інвертори.
В інверторах ведених мережею комутація струму з вентиля на вентиль забезпечується напругою змінного струму джерела живлення (природна комутація).
В автономних інверторах комутація струму з вентиля на вентиль здійснюється додатковими елементами (конденсаторами та котушками індуктивності) – примусова (штучна комутація).
У частотному ЕП використовуються автономні інвертори.
Автономні інвертори, у свою чергу, поділяються на:
автономні інвертори напруги (АІН);
автономні інвертори струму (АІС).
АІН мають джерело живлення
– джерело напруги. Якщо АІН живиться
від
,
то на виході випростувача установлюється
конденсатор великої ємності. У результаті
АІН має жорстку зовнішню характеристику
[![]() ].
У цьому випадку керуючою дією на АД
повинні бути частота і напруга.
].
У цьому випадку керуючою дією на АД
повинні бути частота і напруга.
АІС мають властивості джерела струму, для чого їх живлення здійснюється від джерела струму. Якщо АІС живиться від , на його виході установлюється дросель з великою індуктивністю. У цьому випадку керуючою дією на АД повинні бути частота і струм статора.
Частотний електропривод може мати і АІН, і АІС. Достоїнством АІН є незалежність вихідної напруги від навантаження. Це спрощує формування необхідних законів частотного регулювання (наприклад, і таке інше).
Якщо ж ЕП працює з частими перехідними процесами, або коли має місце рекуперативне гальмування, доцільно використовувати АІС (тут може переходити у інверторний режим і при збереженні напрямку випростеного струму, енергія рекуперується у мережу.
Розповсюдженою схемою СПЧ з АІН є схема, зображена на рисунку 4.42.
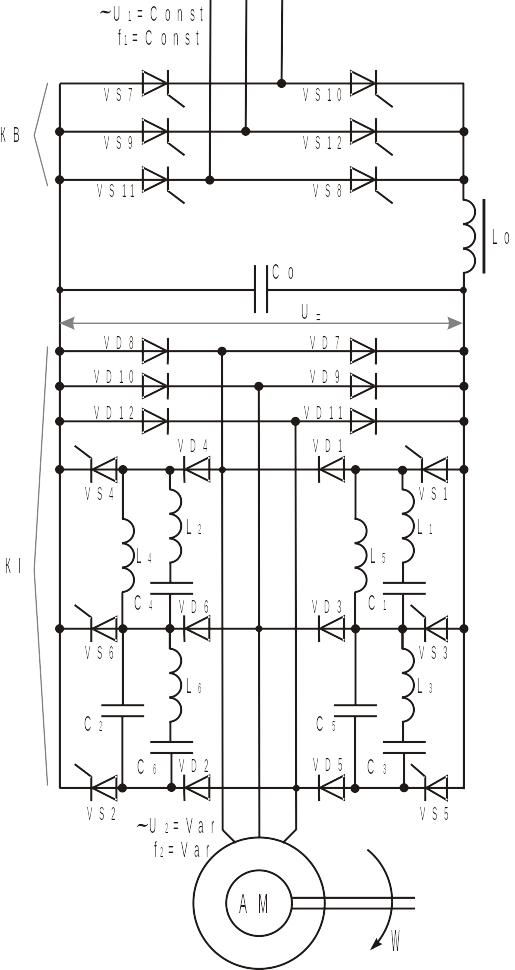
Рисунок 4.42 – Схема статичного перетворювача частоти з автономним інвертором напруги.
Тут тиристори
![]() утворюють керований випростувач
.
На виході
підімкнений реактор згладжувального
фільтра
утворюють керований випростувач
.
На виході
підімкнений реактор згладжувального
фільтра
![]() .
на виході
також підімкнений конденсатор
.
на виході
також підімкнений конденсатор
![]() ,
який разом з діодами
,
який разом з діодами
![]() забезпечують циркуляцію реактивної
потужності.
забезпечують циркуляцію реактивної
потужності.
Призначення тиристорів
![]() розглянуто раніш (дивись коментарії до
рисунків 4.13 та 4.31, фрагмент а)
– для інвертування напруги змінного
струму регулівної частоти. Конденсатори
розглянуто раніш (дивись коментарії до
рисунків 4.13 та 4.31, фрагмент а)
– для інвертування напруги змінного
струму регулівної частоти. Конденсатори
![]() та індуктивності
та індуктивності
![]() (комутувальні конденсатори й індуктивності)
разом з
(комутувальні конденсатори й індуктивності)
разом з
![]() утворюють кола штучної комутації, які
забезпечують закриття основних тиристорів
у потрібний момент.
утворюють кола штучної комутації, які
забезпечують закриття основних тиристорів
у потрібний момент.
Нагадуємо, що амплітуда вихідної напруги регулюється змінюванням величини випростаної напруги за рахунок кута керування тиристорів , а частота визначається частотою комутації тиристорів .
Для одержання якісних статичних і динамічних характеристик АД у системі СПЧ використовуються різні зворотні зв’язки від двигуна (за швидкістю, магнітним потоком, струмом і інші).