

3.12 Аналіз механічної характеристики ад , поданої у вигляді спрощеної формули Клосса
Цю характеристику (рисунок 3.34) можна розділити на дві ділянки.

Рисунок 3.34 – До аналізу механічної характеристики АД у координатах .
1-а ділянка.
При великих значеннях ковзання
можна знехтувати другим членом знаменника
формули (3.39)
![]() ,
тоді формула (3.39) перетвориться у такий
вигляд
,
тоді формула (3.39) перетвориться у такий
вигляд
 ;
;
![]() ;
;
![]() ,
(3.41)
,
(3.41)
де
![]() - стала величина.
- стала величина.
Рівняння (3.41) у вигляді
з погляду математики тлумачиться
рівнянням гіперболи (![]() ).
).
Таким чином ділянка
характеристики
![]() ,
тобто великих значень ковзання
,
являє собою гіперболічну залежність
момента від ковзання як видно ця ділянка
поширюються на двигуневий режим неробочої
частини та на увесь режим гальмування
протиувімкненням.
,
тобто великих значень ковзання
,
являє собою гіперболічну залежність
момента від ковзання як видно ця ділянка
поширюються на двигуневий режим неробочої
частини та на увесь режим гальмування
протиувімкненням.
2-га ділянка.
При малих значеннях ковзання
![]() можна знехтувати першим членом знаменника
формули Клосса (3.39)
можна знехтувати першим членом знаменника
формули Клосса (3.39)
![]() ,
тоді формула (3.39) перетвориться у такий
вигляд:
,
тоді формула (3.39) перетвориться у такий
вигляд:
 ;
;
![]() ;
;
![]() ,
(3.42)
,
(3.42)
де
![]() - стала величина.
- стала величина.
Рівняння (3.42) у вигляді
з погляду математики тлумачиться
рівнянням прямої лінії що проходить
через початок координат (![]() ).
).
Таким чином ділянка характеристики DC, тобто малих значень ковзання являє собою прямолінійну залежність момента АД від ковзання . Як видно ця ділянка поширюється на генераторний режим рекуперативного гальмування та на двигуневий режим його робочої частини; тут знаходиться точка номінального режиму роботи двигуна N й точка синхронного режиму 0; на цій ділянці АД працює в усталеному режимі.
3.13 Механічна характеристика ад у координатах та (залежність )
Якщо механічну характеристику
подавати у координатах
![]() ,
фрагмент а
рисунка 3.35, то в одному й тому ж квадранті
можуть подаватися два різних режими
роботи АД, наприклад у 1-му квадранті є
і двигуневий режим і гальмівний режим.
Це вкрай незручно при аналізі режимів
роботи електроприводів спільно з
виконавчим механізмом.
,
фрагмент а
рисунка 3.35, то в одному й тому ж квадранті
можуть подаватися два різних режими
роботи АД, наприклад у 1-му квадранті є
і двигуневий режим і гальмівний режим.
Це вкрай незручно при аналізі режимів
роботи електроприводів спільно з
виконавчим механізмом.
З цих мотивів, для створення зручності аналізу механічних характеристик електроприводів, у теорії електропривода використовується механічна характеристика у координатах та , тобто , фрагмент б рисунка 3.35, замість характеристики .
Перейти від однієї характеристики до іншої надзвичайно просто, оскільки ковзання само-собою є відносна швидкість: , вирішуючи це рівняння відносно поточної кутової швидкості дає
![]() .
(3.43)
.
(3.43)
З урахуванням (3.43) характеристику легко перетворити у характеристику .
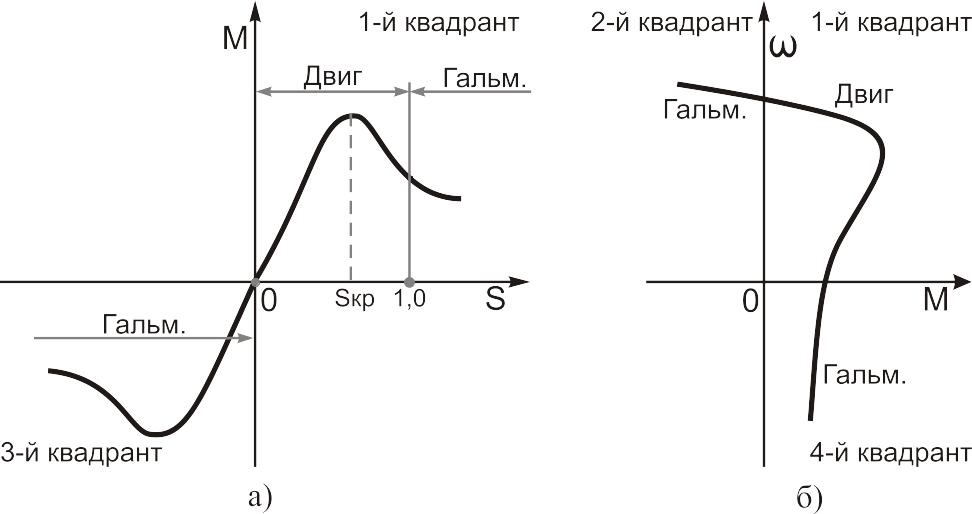
а – залежність ;
б
– залежність
![]() .
.
Рисунок 3.35 – Способи подання механічної характеристики АД.
Механічна статична характеристика має ті переваги, що при графічному вираженні її кожний квадрант прямокутної системи координат має один і тільки один (двигуневий або гальмівний) режим. Причому двигуневому режиму відповідають 1-й та 3-й квадранти, а 2-й та 4-й квадранти відповідають гальмівним режимам (як і раніше мало місце у ДПС).
Характеристика
,
рисунок 3.36, має ті ж самі ділянки
(гіперболічну й прямолінійну) що й
характеристика
,
ділянка
- гіперболічна; ділянка
![]() - прямолінійна, й ті ж самі характерні
точки, що й
:
- прямолінійна, й ті ж самі характерні
точки, що й
:
- синхронний режим (точка
)
з координатами
![]() ;
;
![]() ;
;
- номінальний режим (точка
)
з координатами
![]() ;
;
;
;
- критичний режим (точка
)
з координатами
![]() ;
;
![]() ;
;
- режим початкового пуску
(точка
![]() )
з координатами
)
з координатами
![]() ;
.
;
.
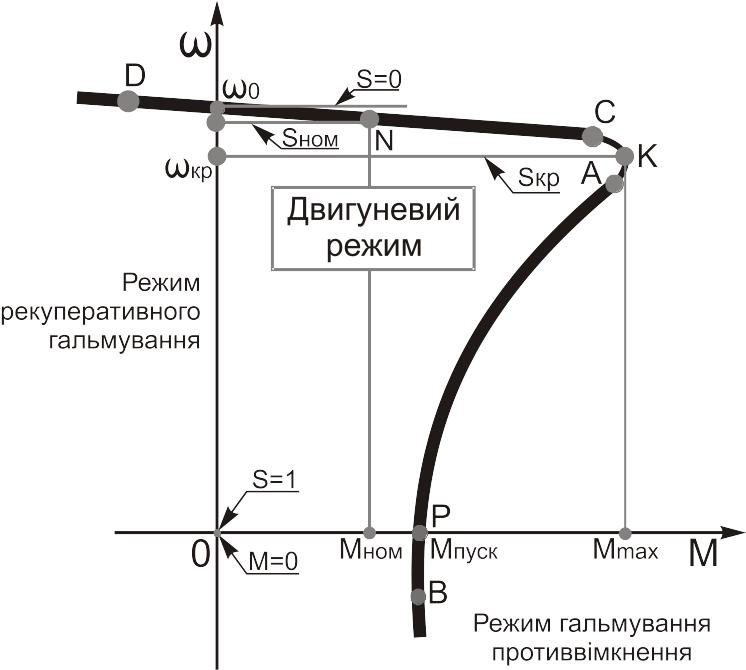
Рисунок 3.36 – До аналізу механічної характеристики АД в координатах .
Із графіків
та
видно, що точка
,
яка відповідає критичному режимові, є
водорозділ гіперболічної та прямолінійної
ділянок характеристик, а відрізок кривих
![]() на обох графіках є невизначеною ділянкою
механічної характеристики і не може
описуватися рівнянням (3.39) – бо тут у
межах
на обох графіках є невизначеною ділянкою
механічної характеристики і не може
описуватися рівнянням (3.39) – бо тут у
межах
![]() рівняння (3.39) втрачає свою фізичну й
математичну суть й перетворюється у
тотожність
рівняння (3.39) втрачає свою фізичну й
математичну суть й перетворюється у
тотожність
![]() :
:
 .
.