

3.11 Механічна статична характеристика ад у координатах s й m ( )
Така характеристика добре відома з загального курсу електричних машин (рисунок 3.33). Нагадаємо деякі її особливості.
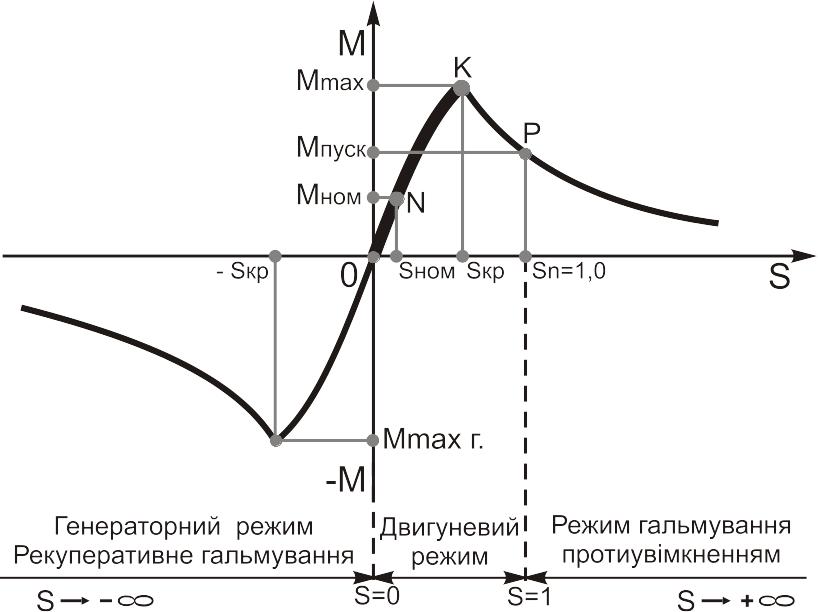
Рисунок 3.33 – Механічна характеристика АД в координатах .
Крива має чотири характерні точки:
- синхронний режим (точка 0),
при цьому
![]() ,
;
,
;
- номінальний режим (точка
N), при цьому
![]() ,
,
![]() ;
;
- критичний режим (точка К),
при цьому момент, який розвиває двигун
у двигуневому режимі, максимальний
![]() ,
а ковзання, що відповідає цьому режимові
критичне
,
а ковзання, що відповідає цьому режимові
критичне
![]() ;
;
- режим початкового пуску
(точка Р), при цьому ковзання
![]() ,
а момент – пусковий
,
а момент – пусковий
![]() .
.
На протязі числової осі
(числа змінюються від
![]() до
до
![]() )
слід відзначити межі змінювання ковзання:
)
слід відзначити межі змінювання ковзання:
а) при – двигуневий режим;
б) при
![]() – режим гальмування противвімкненням;
– режим гальмування противвімкненням;
с) при
![]() – генераторний режим рекуперативного
гальмування.
– генераторний режим рекуперативного
гальмування.
Із рівняння (3.36) видно, що максимальний момент для двигуневого режиму (за абсолютним значенням) менше, ніж максимального момента генераторного режиму
![]()
(на це впливають знаки „![]() ”
у знаменнику рівняння (3.36)), оскільки
опір
”
у знаменнику рівняння (3.36)), оскільки
опір
![]() .
.
Величина критичного ковзання для двигуневого й генераторного режимів (за абсолютним значенням) одна і та ж.
![]()
Рівняння механічної
характеристики (3.37) відповідає більш-менш
точним співвідношенням параметрів
характеристики, тому що ураховує падіння
напруги на активному опорі статора
![]() .
У реальних умовах активний опір статора
(особливо для АД середньої та великої
потужностей) не значний і ним (з достатньою
для практичних розрахунків точністю)
можна знехтувати
.
У реальних умовах активний опір статора
(особливо для АД середньої та великої
потужностей) не значний і ним (з достатньою
для практичних розрахунків точністю)
можна знехтувати
![]() .
(3.38)
.
(3.38)
З урахуванням (3.38) рівняння механічної характеристики (3.37) набере вигляду
 .
(3.39)
.
(3.39)
Рівняння (3.39) називається спрощеною механічною характеристикою АД у координатах S та M. Однак для двигунів великої потужності (де дуже мале) це рівняння досить точно відповідає фізичним процесам АД.
Рівняння (3.37) ще називають рівнянням Клосса, а рівняння (3.39) – спрощеною формулою Клосса.
Якщо у рівнянні (3.39) замість
поточних значень S та M підставити їх
номінальні значення:
;
,
а кратність максимального момента
![]() (перевантажувальну здатність) позначити
(перевантажувальну здатність) позначити
![]() :
:
![]() ,
то після перетворень рівняння (3.39) буде
мати вигляд:
,
то після перетворень рівняння (3.39) буде
мати вигляд:
![]() .
(3.40)
.
(3.40)
У рівнянні (3.40) слід користуватися
тільки знаком „+” перед радикалом,
оскільки знак „-” відповідає випадку
знаходження точок
![]() й
й
![]() на механічній характеристиці у зоні,
де
на механічній характеристиці у зоні,
де
![]() .
Цей випадок не має практичного значення,
оскільки ділянка характеристики де
не є робочою ділянкою характеристики
АД.
.
Цей випадок не має практичного значення,
оскільки ділянка характеристики де
не є робочою ділянкою характеристики
АД.
Значення перевантажувальної
здатності АД
має суттєве практичне значення при
експлуатації електроприводів, величина
його установлюється Державним стандартом.
Для трифазних АД загального використання
у широкому діапазоні потужностей АД
має такі межі:
![]() ,
причому більше значення
відноситься до синхронної частоти
обертання АД
,
причому більше значення
відноситься до синхронної частоти
обертання АД
![]() ,
а менше – для
,
а менше – для
![]() .
.
Для спеціальних серій АД
перевантажувальна здатність більш
висока. Так для кранових та металургійних
АД вона складає
![]() .
.