

3.8 Статичні механічні характеристики електродвигунів постійного струму мішаного збудження (дпс мз)
У ДПС МЗ, схема якого подана на рисунку 3.22, магнітний потік створюється спільною дією м.р.с. незалежної обмотки збудження LM1 (НЗ) й послідовної обмотки збудження LM2 (ПЗ).
Тому механічні характеристики ДПС МЗ займають проміжне положення проміж характеристиками ДПС НЗ й ДПС ПЗ. Обмотка НЗ, що створює сталу величину м.р.с., забезпечує магнітний потік при відсутності струму у колі якоря, а отже можливість роботи ДПС МЗ при неробочому ході.
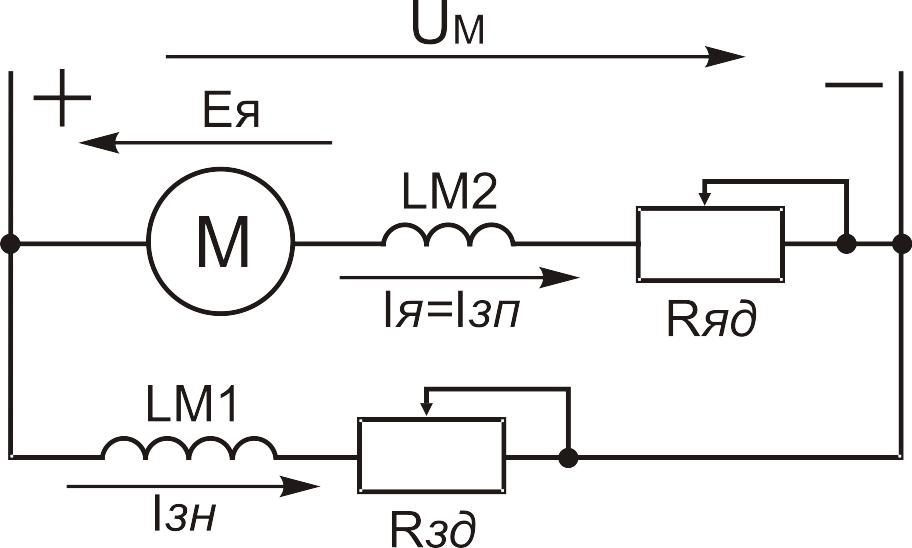
Рисунок 3.22 – Нормальна схема вмикання ДПС МЗ.
М.р.с. обмотки ПЗ збільшує магнітний потік двигуна , що сприяє підвищенню пускового момента й, разом з тим, викликає зниження швидкості при збільшенні навантаження.
ДПС МЗ мають значне насичення магнітної системи, за цих умов їх механічні характеристики (як і ДПС ПЗ) не можуть мати точного аналітичного вираження. При розрахунках слід користуватися (як і для ДПС ПЗ) універсальними характеристиками, наведеними у каталогах та довідниках для відповідних серій ДПС МЗ.
Співвідношення м.р.с. обмоток НЗ і ПЗ можуть бути різними для різних серій МПС МЗ – від цього співвідношення й залежить вигляд механічних характеристик. За звичай найбільш вживаним є співвідношення, яке при номінальному струмі дає одинакові (fifty-fifty) м.р.с. обох обмоток збудження.
Механічні характеристики ДПС МЗ перетинаються в одній точці, що відповідає швидкості ідеального неробочого ходу (рисунок 3.23).
З появою навантаження на валу швидкість різко знижується (як у ДПТ ПЗ), а потім спад сповільнюється й здійснюється майже на прямій лінії (як у ДПТ НЗ). Це пояснюється тим, що при малих моментах навантаження магнітна система не насичена, потік значно зростає від додавання до сталої величини м.р.с. обмотки НЗ змінну величину м.р.с. обмотки ПЗ.
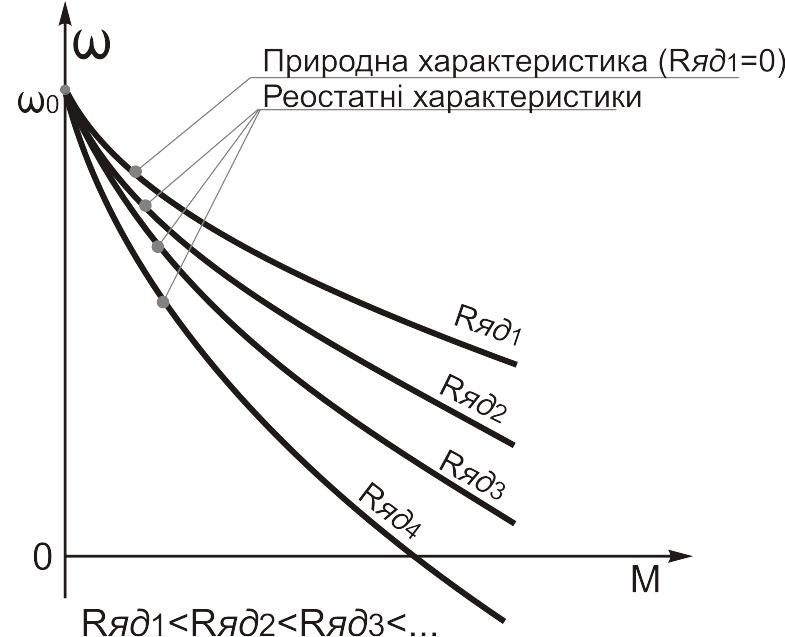
Рисунок 3.23 – Механічні характеристики ДПС МЗ.
При значних моментах навантаження, а отже й значній м.р.с. обмотки ПЗ настає насичення магнітної системи двигуна, потік стає сталим, а падіння швидкості, таким чином, буде обумовлюватись в основному тільки падінням напруги у якірному колі.
Механічна характеристика
буде тим м’якшою, чим більшим буде вплив
обмотки ПЗ. При збільшенні опору в
якірному колі швидкість двигуна
зменшується (дивись рисунок 3.23) й
характеристики стають більш м’якими.
При великих опорах у якірному колі
(наприклад,
![]() )
двигун під впливом потенціального
статичного момента може плавно перейти
із двигуневого режиму у гальмівний
(четвертий квадрант).
)
двигун під впливом потенціального
статичного момента може плавно перейти
із двигуневого режиму у гальмівний
(четвертий квадрант).
Для збереження узгодженої дії обмоток НЗ й ПЗ реверсування ДПС МЗ здійснюється зміною напрямку струму якоря.
3.9 Статичні характеристики дпс мз у гальмівних режимах
На відміну від ДПС ПЗ, двигун, що розглядається має усі три способи електричного гальмування:
- рекуперативне;
- противвімкненням;
- динамічне.
3.9.1 Можливість рекуперативного гальмування обумовлена наявністю магнітного потоку обмотки НЗ. Незалежний потік дозволяє двигуну при досягненні швидкості, що перевищує швидкість ідеального неробочого ходу , перейти у режим рекуперативного гальмування (генераторний з віддачею енергії в мережу). Однак при віддачі енергії у мережу напрямок струму в якорі й обмотці ПЗ зміниться на протилежний, і тому м.р.с. обмотки ПЗ при цьому буде здійснювати розмагнічувальну дію, що викличе уповільнене збільшення гальмівного момента з ростом струму.
Щоб цього не трапилось йдуть двома шляхами.
1-й шлях. Змінити напрямок струму в обмотці ПЗ. Цей шлях складний, ним майже не користуються.
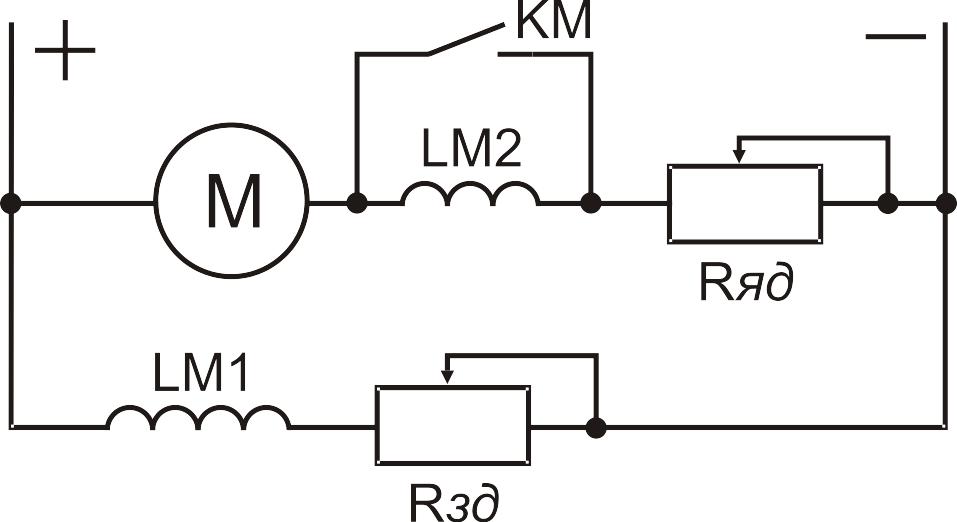
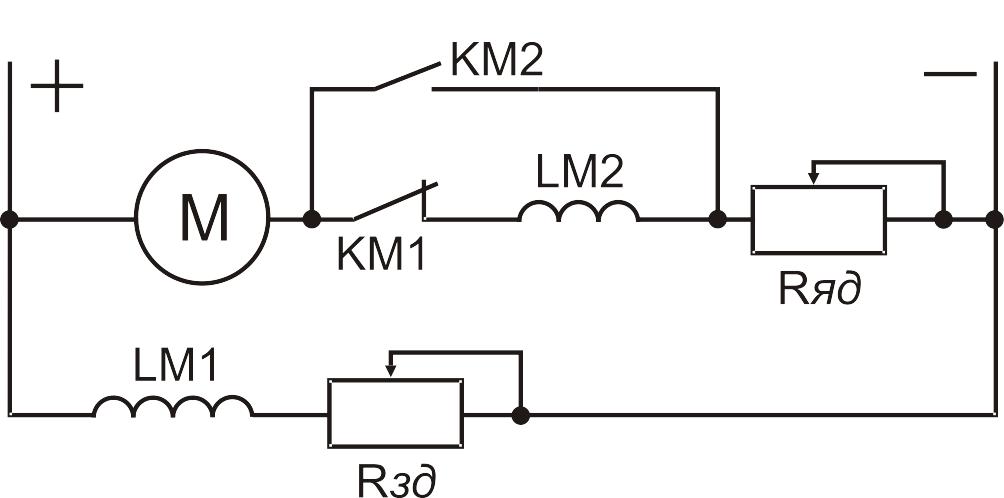
2-й шлях. Цей шлях широко використовується (рисунок 3.24).
а)
б)
а – з зашунтованою обмоткою LM2;
б – з вимкненою обмоткою LM2;
Рисунок 3.24 – Схема рекуперативного гальмування.
Тут ДПС МЗ перетворюють у ДПС НЗ для чого обмотку ПЗ (LM2) або закорочують шунтівним контактором КМ (рисунок 3.24, фрагмент а), або вимикають (рисунок 3,24, фрагмент б), у цій схемі додатково використовуються два контактори (КМ1 розмикається, КМ2 замикається) замість одного, як це передбачено схемою фрагмента а.
Таким чином, при рекуперативному
гальмуванні машина працює як генератор
незалежного збудження. Тому механічні
характеристики прямолінійні (характеристики
![]() й
),
як і у двигуна незалежного збудження
(рисунок 3.25). Характеристики 1
й 2
для випадку коли б обмотка послідовного
збудження була б не зашунтована й
зреверсована.
й
),
як і у двигуна незалежного збудження
(рисунок 3.25). Характеристики 1
й 2
для випадку коли б обмотка послідовного
збудження була б не зашунтована й
зреверсована.
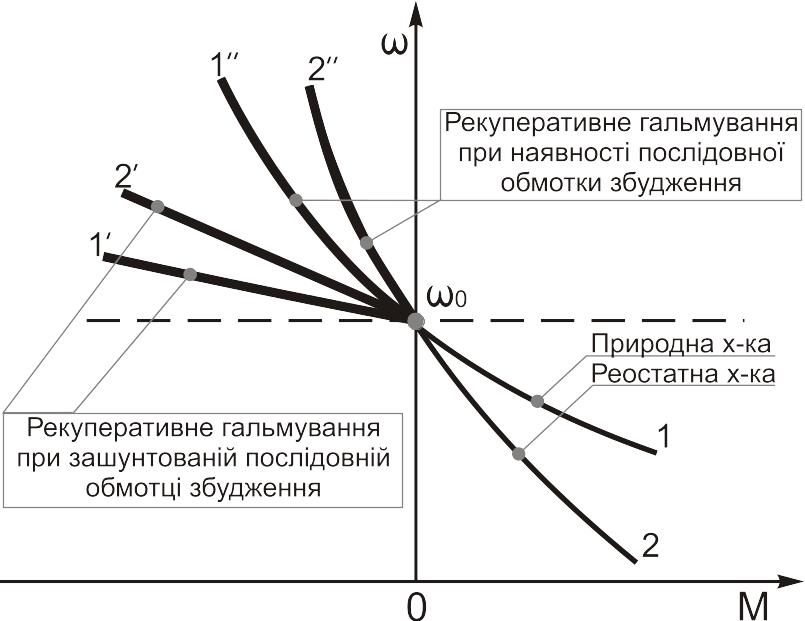
Рисунок 3.25 – Характеристики рекуперативного гальмування.
3.9.2 Гальмування
противвімкненням суттєво не відрізняється
від таких ДПС, що раніш розглядались.
Наприклад при активному статичному
моменті опору й великих значеннях
додаткового опору у якірному колі
![]() під дією потенціального момента (якщо
статичний момент стане більше момента,
що розвиває двигун) переходить у режим
гальмування противвімкненням з активним
статичним моментом, рисунок 3.26.
Характеристики розташовані
у 4-му квадранті, як і раніш, з ростом
опору якірного кола жорсткість
характеристик падає (
під дією потенціального момента (якщо
статичний момент стане більше момента,
що розвиває двигун) переходить у режим
гальмування противвімкненням з активним
статичним моментом, рисунок 3.26.
Характеристики розташовані
у 4-му квадранті, як і раніш, з ростом
опору якірного кола жорсткість
характеристик падає (![]() ),
характеристики нелінійні. Нелінійність
пояснюється, як і раніше, впливом м.р.с.
обмотки ПЗ, яка змінюється, за рахунок
зміни величини струму навантаження.
),
характеристики нелінійні. Нелінійність
пояснюється, як і раніше, впливом м.р.с.
обмотки ПЗ, яка змінюється, за рахунок
зміни величини струму навантаження.
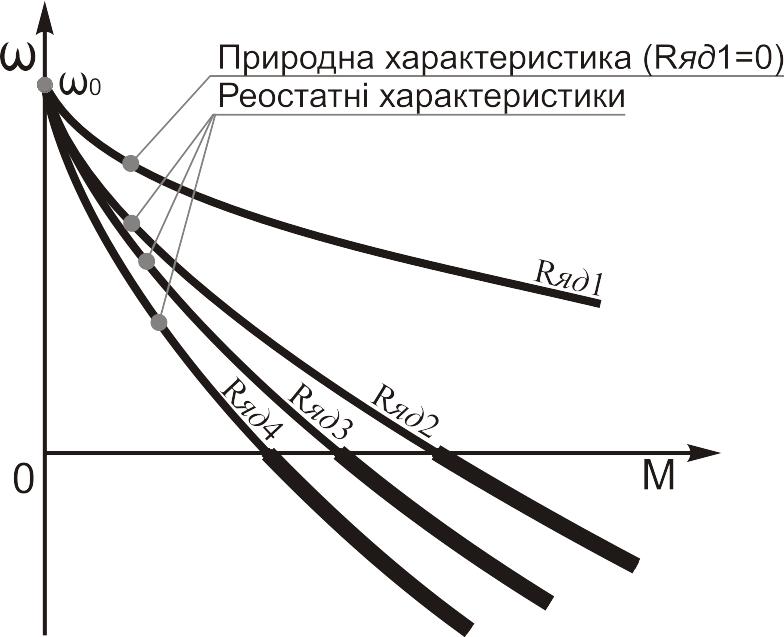
Рисунок 3.26 – Характеристики гальмування.
Для реалізації гальмівного режиму противвімкнення при реактивному статичному моменті (накопичена кінетична енергія) реверсується струм якоря й уводиться додатковий опір резистором якірного кола, дивись схему, рисунок 3.27.

Рисунок 3.27 – Схема гальмування противвімкненням.
Якщо
![]() то
то
![]() .
Фізичні процеси, що при цьому протікають
аналогічно раніш розглянутим двигунам,
рисунок 3.28. Механічна характеристика
гальмування противвімкненням розташована
у 2-му квадранті й також нелінійна (як і
у попередньому випадку).
.
Фізичні процеси, що при цьому протікають
аналогічно раніш розглянутим двигунам,
рисунок 3.28. Механічна характеристика
гальмування противвімкненням розташована
у 2-му квадранті й також нелінійна (як і
у попередньому випадку).
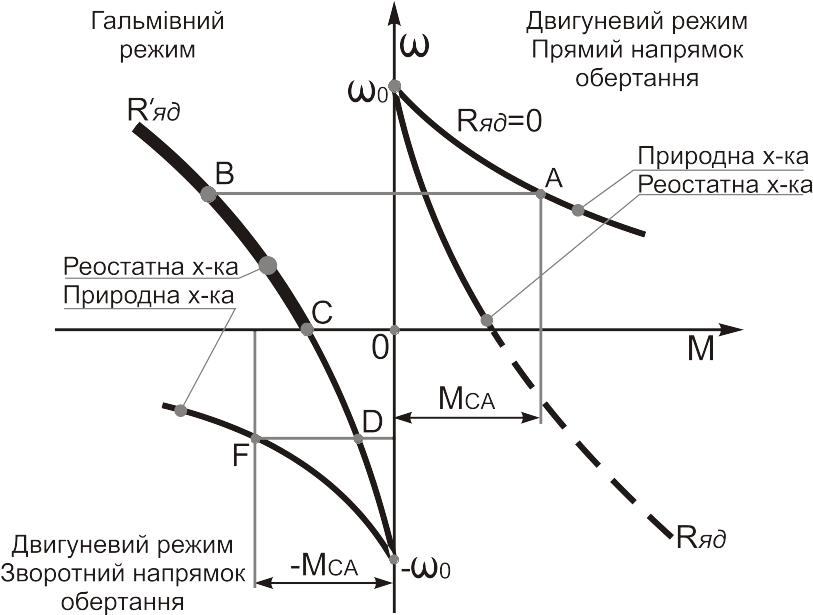
Рисунок 3.28 – Характеристики гальмування.