

3.2 Електродвигуни
Для обертальних електродвигунів залежність кутової швидкості електродвигуна від його обертового момента називають механічною характеристикою електродвигуна:
![]() ,
,
де - швидкість електродвигуна, ;
- електромагнітний обертовий момент,
який розвиває електродвигун,
![]() .
.
Майже усі електродвигуни мають швидкість, що є убуваючою (спадною) функцією момента двигуна. Таку характеристику мають усі електродвигуни постійного струму, асинхронні двигуни, колекторні електродвигуни змінного струму й таке інше.
Ступінь зменшення швидкості у різних електродвигунів різна й характеризується жорсткістю механічної характеристики.
Жорсткістю механічної характеристики електродвигуна є відношення
![]() ,
(3.5)
,
(3.5)
тобто відношення різниці електромагнітних моментів двигуна у будь-яких сусідніх точках характеристики до відповідної різниці швидкостей двигуна у тих же точках.
У більшості випадків на робочих ділянках механічна характеристика має від’ємну жорсткість
![]() .
.
Якщо механічна характеристика прямолінійна, її ступінь жорсткості постійний
![]() ,
,
а якщо нелінійна, її ступінь жорсткості не залишається постійним
![]()
й визначається у цьому випадку згідно (3.5) в кожній точці характеристики як похідна моменту від кутової швидкості
![]() .
.
Усе різноманіття електродвигунів можна поділити на чотири групи (класи) з приблизно однаковим характером зміни жорсткості механічної характеристики у кожному класі, дивись рисунок 3.2.
І клас. Електродвигуни першого класу мають абсолютно жорстку механічну характеристику. При цьому швидкість електродвигуна при зміні його момента залишається незмінною, тобто:
![]() ,
,
ступінь жорсткості є нескінченність, а характеристика являє собою пряму паралельну осі абсцис.
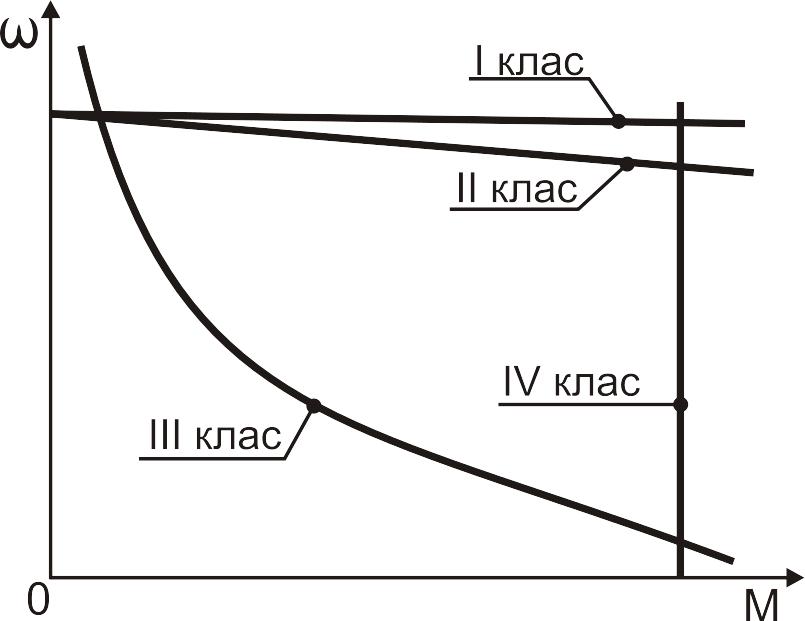
Рисунок 3.2 – Механічні характеристики електродвигунів.
При будь-якому навантаженні електродвигуна швидкість його залишається сталою. Таку характеристику має лише один тип електродвигунів – синхронні.
ІІ клас.
Двигуни другого класу мають жорстку
характеристику. При цьому швидкість
електродвигуна при збільшенні його
момента майже не змінюється (незначно
зменшується), тобто жорсткість
![]() має значну за модулем від’ємну величину.
Характеристика являє собою похилу майже
паралельну осі абсцис. Таку механічну
характеристику мають електродвигуни
постійного струму незалежного
(паралельного) збудження, асинхронні
електродвигуни у межах робочих реальних
навантажень, та деякі інші.
має значну за модулем від’ємну величину.
Характеристика являє собою похилу майже
паралельну осі абсцис. Таку механічну
характеристику мають електродвигуни
постійного струму незалежного
(паралельного) збудження, асинхронні
електродвигуни у межах робочих реальних
навантажень, та деякі інші.
ІІІ клас. Двигуни третього класу мають м’яку механічну характеристику. При цьому швидкість електродвигуна при зміні його момента змінюється значно. Таку механічну характеристику мають електродвигуни постійного струму послідовного збудження, особливо у межах малих навантажувальних моментів. При цьому жорсткість механічної характеристики може мати малу за модулем від’ємну величину.
IV клас. Електродвигуни четвертого класу мають абсолютно м’яку механічну характеристику. При цьому момент електродвигуна залишається сталим при будь-якій його швидкості, тобто
![]() ,
,
ступінь жорсткості дорівнює нулю, а характеристика являє собою пряму лінію паралельну осі ординат. Таку характеристику має електродвигун постійного струму незалежного збудження при живленні його якірного кола від джерела струму, або при роботі його у замкнених САР у режимі стабілізації струму якоря.
Слід відзначити , що у реальних умовах реальним електродвигунам можна надавати такі якості, що вони будуть мати властивості декількох (а не одного) класів з різним ступенем жорсткості механічної характеристики.
Так змінний ступінь жорсткості має асинхронний двигун ( ), наприклад, в усьому діапазоні швидкостей двигуневого режиму (при зміні ковзання від нуля до одиниці):
![]() .
.
У межах робочих навантажень (ділянка характеристики АВ) характеристика прямолінійна й має жорсткість
,
а на ділянці характеристики CD має гіперболічний характер, а жорсткість
.
На ділянці характеристики BFC жорсткість взагалі змінюється за вельми складними законами (дивись рисунок 3.3).
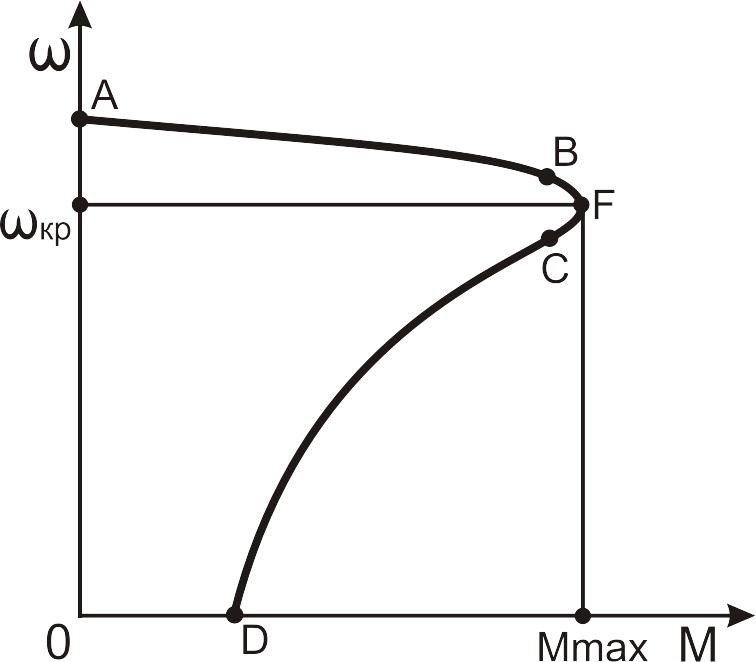
Рисунок 3.3 - Механічна характеристика АД (двигуневий режим).
Властивості більшості електродвигунів мати від’ємну жорсткість механічних характеристик обумовлює деякі суттєві переваги електродвигунів, як джерел механічної енергії порівняно з іншими неелектричними двигунами. Як уже відмічалось у розділі механіки електропривода, при роботі електродвигуна й виконавчого механізму в усталеному режимі рівняння рівноваги механічного руху має вигляд:
![]() ,
або
,
або
![]() ,
,
тобто має місце рівновага рушійного момента двигуна й момента опору механізму.
Зміна момента опору механізму на валу двигуна призводить до того, що швидкість електродвигуна й момент, що він створює можуть автоматично змінюватись, а привод буде продовжувати свою роботу стійко у новому усталеному режимі (з новими й ). Для установлення нової рівноваги між й в усяких неелектричних двигунах необхідне застосування спеціальних регуляторів, які діють на джерело енергії, змінюючи при цьому відповідну подачу палива або іншого робочого тіла (пари, води й таке інше).
В електродвигунах роль автоматичного регулятора виконує е.р.с. двигуна.
Ця особливість електродвигунів автоматично підтримувати рівновагу системи при зміні момента опору є вельми цінною властивістю (відмітною) електродвигунів порівняно з двигунами інших типів.
Розглянемо цю властивість на прикладі привода з електродвигуном постійного струму незалежного збудження, рисунок 3.4.
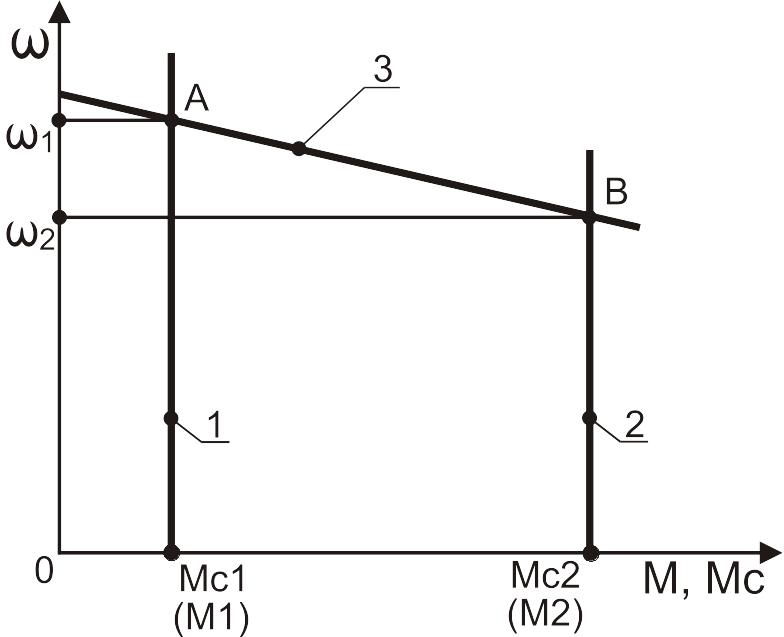
Рисунок 3.4 – До пояснення властивості електродвигунів автоматично зберігати усталений режим при змінюванні навантаження.
Лінія 3 є механічна характеристика
електродвигуна, а лінії 1 та 2 – механічні
характеристики виконавчого механізму
першого класу для двох значень момента
опору
![]() та
та
![]() відповідно. Будемо вважати, що
характеристика 1 відповідає неробочому
ходу механізму, а характеристика 2 –
роботі його під навантаженням. (Механічні
характеристики 1 та 2 виконавчого
механізму для зручності зображені у
першому квадранті, дійсно ж їх слід було
б зобразити у другому, оскільки момент
опору
й рушійний момент електродвигуна
мають протилежні знаки).
відповідно. Будемо вважати, що
характеристика 1 відповідає неробочому
ходу механізму, а характеристика 2 –
роботі його під навантаженням. (Механічні
характеристики 1 та 2 виконавчого
механізму для зручності зображені у
першому квадранті, дійсно ж їх слід було
б зобразити у другому, оскільки момент
опору
й рушійний момент електродвигуна
мають протилежні знаки).
Спочатку при неробочому ході механізму коли
![]()
двигун працює зі швидкістю
![]() .
Потім зі збільшенням навантаження рух
двигуна сповільнюється, швидкість його
знижується, завдяки чому зменшується
його Е.Р.С. при цьому збільшується падіння
напруги на якорі (у відповідності до
рівняння рівноваги напруги двигуна
.
Потім зі збільшенням навантаження рух
двигуна сповільнюється, швидкість його
знижується, завдяки чому зменшується
його Е.Р.С. при цьому збільшується падіння
напруги на якорі (у відповідності до
рівняння рівноваги напруги двигуна
![]() )
отже збільшується струм якоря й зростає
момент, що розвиває двигун. Зростання
момента відбувається до тих пір, поки
не встановиться рівновага моментів
)
отже збільшується струм якоря й зростає
момент, що розвиває двигун. Зростання
момента відбувається до тих пір, поки
не встановиться рівновага моментів
![]() ,
,
у точці В (точка перетину
характеристики 3 механізму й характеристики
2 двигуна під навантаженням). Настала
нова рівновага у точці В, аналогічно
точці А, але уже з меншою швидкістю
![]() із більшим моментом
, що відповідає навантаженню у точці В.
І навпаки, якщо під навантаженням (точка
В у якій працював електродвигун в
усталеному режимі) зменшити навантаження,
двигун почне розганятися, збільшиться
Е.Р.С. якоря, зменшиться падіння напруги,
зменшиться струм, зменшиться момент і
так до усталеного стану.
із більшим моментом
, що відповідає навантаженню у точці В.
І навпаки, якщо під навантаженням (точка
В у якій працював електродвигун в
усталеному режимі) зменшити навантаження,
двигун почне розганятися, збільшиться
Е.Р.С. якоря, зменшиться падіння напруги,
зменшиться струм, зменшиться момент і
так до усталеного стану.