

3) Операторный способ
Далее
по таблице можно найти обратный переход:
Если
найти корни
 pi=0,p1…
pi=0,p1…
Воспользуемся формулой разложения:

 -
обр-е пр-е Фурье.
-
обр-е пр-е Фурье.
12. Критерии кач-ва рег-ния.
Показатели кач-ва сис-мы б. прямые и косвенные
П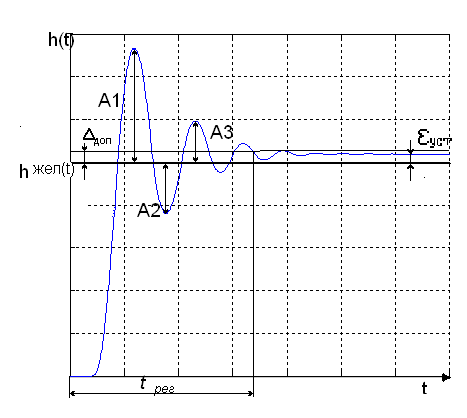 рямые
опред-ся на основе графика перех-й
хар-ки.
рямые
опред-ся на основе графика перех-й
хар-ки.
εуст – устан-шаяся ошибка.
∆доп–доверит-й интервал ошиб-ки: если доп-й интервал не задан, то по умолчанию мы принимаем его 5% от hжел.
Быстрод-е - время, в течение кот-го перех-я х-ка войдёт в доверительный интервал и уже не выйдет, это время и есть время регулирования tрег.
Перерег-ние – макс-е знач-е вых-го пар-ра, амплитуда hmax. Если перейти к безразм-м единицам, то перерег-ние будет хар-ся:
 *100%
*100%
Степень затухания - данный показатель получаем, сопоставляя амплитуды переходной характеристики следующим образом:
 .
.
Колебат-сть сис-мы хар-ся числом колебаний регулируемой в-ны за время ПП-са tрег(tп). Если за это вр. ПП в сис-ме совершает число колеб-й меньше зад-го по усл-м технологии, тот считается, что с-ма им-т треб-е кач-во регул-я в части ее колебательности.
Устан-ся ошибка εуст опред-ся как раз-сть м/ду устан-мся знач-м рег-мой в-ны после окончания ПП и ее зад-м знач-м:
εуст=hжел-hуст.
Косвенные критерии качества регулирования
1) ПП-с сущ-но зав-т от корней ХАУ. Для оценки качества рег-ния исп-ся понятие “средний геометрический корень”- Ω.
 ,
где
p1..pn
–
корни ХАУ, а
,
где
p1..pn
–
корни ХАУ, а
 - соответствующие коэффициенты ДУ.
- соответствующие коэффициенты ДУ.
Из ур-я следует, что для повышения быстродей-я сис-мы следует ув-ть коэф-т an . Чем больше величина Ω , тем у системы большее быстрод-е. Если допустить что корни веществ-е и отриц-ны, то корень, кот. в координатах Im(Re) будет ближе к мнимой оси, будет затягивать ПП.
Если ближайший корень к мнимой оси будет следующим:
 ,
,
тогда ПП будет затягиваться этой парой корней и решение будет зависеть от p1,2. Перейдём к след. виду

 ψ
–
степень затухания.
ψ
–
степень затухания.
Оценка кач-ва по показателю колебательности(зн-е ординаты Mmax амплитудной хар-ки
зам-й
сис-мы при нач-ой ординате равной 1)
В результате получили уравнение окружности с радиусом R и с центром в точке (C,0): R=M/1-M2; C=M2/1-M2
13. Синтез системы рег-ния м-дом расчета пар-в рег-ра на желаемую степень затух-я пп.
Пусть
ориент-но выбран
рег-р.
При оценке качества систем упр-ния на
основе косв-х м-дов была получена зав-сть
степени ψ затухания от ближайшего к
мнимой оси корня, связанного с параметром
m:
 (2.7). При
m
= 0 имеем границу области устойчивости.
Чаще всего выбирают значение m
от 0,22 (ψ = 0,75) до 0,366 (ψ = 0,9). Пусть в
комплексной плоскости корней ХАУ
мнимая ось сдвинута до совпадения с
корнем,
местополож-е кот-го х-ся пар-ром m.
Такому смещению мнимой оси соотв-т
подстановка частотной области p
= mω
± jω.
(2.8)
(2.7). При
m
= 0 имеем границу области устойчивости.
Чаще всего выбирают значение m
от 0,22 (ψ = 0,75) до 0,366 (ψ = 0,9). Пусть в
комплексной плоскости корней ХАУ
мнимая ось сдвинута до совпадения с
корнем,
местополож-е кот-го х-ся пар-ром m.
Такому смещению мнимой оси соотв-т
подстановка частотной области p
= mω
± jω.
(2.8)
Исходя из условия «попадания» одного из корней на мнимую ось можно в соответствии с критерием Найквиста записать
Wp(mω ± jω)∙Woб(mω ± jω) = 1. (2.9)
Из уравнения (2.9) можно получить два уравнения:
ApAoб = 1; (2.10), φp + φoб = 0,(2.11)
где Ap, Aoб соотв-но АЧХ и φp, φoб ФЧХ рег-ра и объекта.
Рассмотрим особенности расчета параметров регуляторов.
При расчета П-регулятора kпр равен Ap. Нулевой сдвиг фазы пропорционального регулятора заменим на –π. Тогда уравнения (2.10), (2.11) примут вид: kпр∙ Aoб(mω ± jω) = 1; (2.12), π + φoб(mω ± jω) = 0. (2.13)
Из уравнения (2.13) найдем частоты, а затем на основании уравнения (2.12) определим kпр.
При расчете ПИ-регулятора искомыми коэф-ми будут kпр и коэффициент при интегральной составляющей kи. Перепишем уравнение (2.10), (2.11) с учетом искомых коэффициентов kпр и kи:
Ap(m, ω, kпр, kи)∙Aoб(m, ω) = 1; (2.12)
φp(m, ω, kпр, kи) + φoб(m, ω) = 0. (2.13)
Для произвольно заданных значений ω < ωгр можно найти мн-во знач-й kпр и kи, кот-е будут обеспеч-ть желаемую степень затухания ПП. Граничную частоту ωгр можно опр-ть из условия:
Aoб(ωгр) ≈ 0. (14)
Имея массив коэф-тов, можно ввести дополнительные критерии качества регулирования для нахождения лучшей пары kпр и kи.
При расчете ПИД-регулятора тесно свяжем коэффициент при дифференцирующей составляющей kД с коэффициентом kи:
kи kD ≈ (0,1÷0,15).
Весь дальнейший расчет ПИД-регулятора аналогичен расчету для ранее рассмотренного ПИ-регулятора.