

Функциональная схема су.
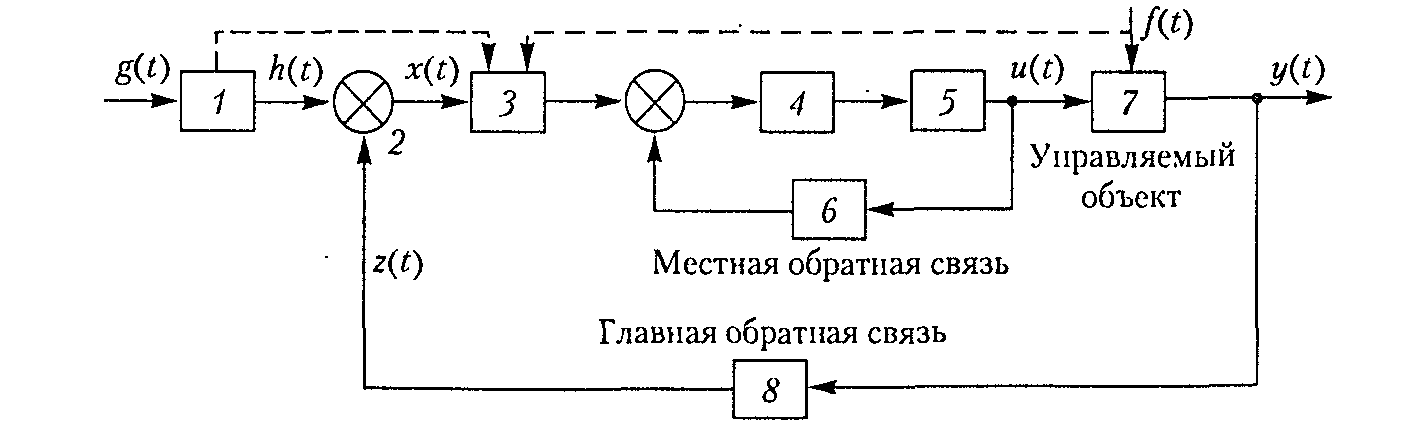
Устройство, предназначенное для выполнения задачи управления, называется управляющим устройством. На рисунке оно разбито на ряд звеньев. Измерительное устройство 8 измеряет фактическое значение управляемой величины. Результатом измерения является величина z(t). Задающее устройство 1 преобразует задающее воздействие g(t) в величину h(t) той же физической природы, что и z(t). Сравнивающее устройство 2 производит вычитание x(t) = h(t) – z(t) и тем самым определяет ошибку системы.
Далее ставятся усилительно-преоразовательное 4 и исполнительное 5 устройства. В некоторых случаях вводится дополнительное измерительное устройство 3, а иногда и звено 6, через которое осуществляется местная обратная связь. Управляющее устройство в соответствии с заложенным в него алгоритмом управления формирует управляющее воздействие u(t), направленное на ликвидацию рассогласования x(t). Независимо от причины, вызвавшей это рассогласование.
Наиболее распространённые задачи: стабилизация, выполнение заданной программы, слежение.
5. История развития теории управления.
Тео́рия управле́ния — наука о принципах и методах управления различными системами, процессами и объектами.
Основами теории управления являются кибернетика и теория информации.
Суть теории управления: на основе системного анализа составляется математическая модель объекта управления (ОУ), после чего синтезируется алгоритм управления (АУ) для получения желаемых характеристик протекания процесса или целей управления.
История
Первое самоуправляемое устройство было построено Ктезибием из Александрии (примерно в 250 году до н.э.). Его водяные часы использовали сифон как регулятор потока воды. До этого изобретения считалось, что только живые существа способны модифицировать свое поведение в ответ на изменения в окружающей среде.
Следующим шагом в развитии саморегулирующихся систем управления с обратной связью стали регулятор паровой машины Джеймса Уатта (1736—1819), и термостат Корнелиса Дреббеля (1572—1633).
Математическая теория устойчивых систем с обратной связью была разработана в XIX веке.
В связи с развитием паровых машин, потребовались регуляторы, которые могли бы автоматически поддерживать установившийся режим их работы. Универсальность математических методов, полученных в данной теории, перевела ее в область наук, занимающихся изучением абстрактных математических объектов, а не их конкретных технических реализаций.
Родоначальником непосредственно «математической теории управления» можно считать Александра Михайловича Ляпунова — автора классической теории устойчивости движения (1892)
В ХХ веке на базе теории автоматического регулирования сложилась наука «теория управления».
6. Классификация су по виду используемой информации в управлении.
По виду используемой управляющим устройством информации различают разомкнутые и замкнутые АСУ: в разомкнутых системах отсутствует обратная связь между выходом объекта управления и входом управляющего устройства. В таких системах управляемая величина не контролируется. При наличии обратной связи объект управления и управляющее устройство образуют замкнутый контур, обеспечивающий автоматический контроль за состоянием объекта управления.