

23. Частотные характеристики типовых звеньев сау. Интегрирующее и дифференцирующее звенья.
Интегрирующее звено. Интегрирующим звеном называют звено, которое описывается уравнением:
![]() (6)
(6)
или передаточной функцией:
![]() (7)
(7)
При этом переходная функция интегрирующего звена (рис. 12а) и его функция веса (рис. 12б) соответственно имеют вид:
![]()
![]()
Рис. 12
Частотные характеристики интегрирующего звена (рис. 13) определяются соотношениями:
![]()

=
h(t)
Рис. 13
Логарифмические частотные характеристики интегрирующего звена (рис. 14) определяются по формуле:
![]()
Рис. 14
Дифференцирующее звено. Дифференцирующим называют звено, которое описывается уравнением:
![]() (8)
(8)
или передаточной функцией:
![]() (9)
(9)
При этом переходная функция звена (рис. 16а) и его функция веса (рис. 16б) соответственно имеют вид:
![]()
![]()
Рис. 16
Частотные характеристики звена (рис. 17а-в) определяются соотношениями
![]()
а) б) б)
Идеальное дифференцирующее звено является физически не реализуемым. В реальных звеньях такой вид характеристики могут иметь только в ограниченном диапазоне частот.
Логарифмические частотные характеристики звена (рис. 18) определяются по формуле:
![]()
Рис. 18
Частотные характеристики типовых звеньев сау. Звено чистого запаздывания.
Запаздывающее звено. Дифференциальное уравнение и передаточная функция запаздывающего звена имеют вид:
![]() (16)
(16)
![]() (17)
(17)
где – время запаздывания.
В
соответствии с теоремой запаздывания
![]() .
При этом переходная функция звена и его
функция веса (рис. 30а, б) соответственно
определяются соотношениями:
.
При этом переходная функция звена и его
функция веса (рис. 30а, б) соответственно
определяются соотношениями:
![]()
![]()
k(t)
h(t)







Рис. 30
Частотные характеристики звена (рис. 31а-в) определяются соотношениями:
![]()
а) б) в)
Рис. 31
25. Виды динамических систем и свойства объектов управления.
Динамические системы, в отличие от статических, помнят свое прошлое состояние, то есть обладают памятью. Поэтому в записи модели динамических систем присутствует производная, связывающая прошлое состояние системы с настоящим. Чем большей памятью обладает система, тем больше состояний из прошлого влияют на настоящее, тем большая степень старшей производной используется в записи модели.
Динамические системы, в кот. предполагается, что прохождение возмущения от входа к выходу в ОУ происходит мгновенн описываются обыкновенными диф. уравениями и называются системами со сосредоточенными параметрами.(Система управления двигателем)
Динамические системы, в кот. предполагают, что время прохождения возмущения конечно, описывается диф. уравнением в частных производных и называются системами с распределенными параметрами. (Прохождение воды в трубопроводе).
Объекты управления являются теми основными элементами автоматических систем, в которых при помощи технических средств должен осуществляться заданный алгоритм функционирования.
В качестве объекта управления может выступать отдельная машина или набор машин, которые направлены в своем действии на выполнение технологического процесса с целью получения определенного вида продукции.
Объектом управления может быть помещение или комплекс помещений с определенными параметрами внутренней среды, если эта среды оказывает серьезное воздействие на объект управления.
Основной особенностью объекта управления является то обстоятельство, что в них происходит выработка, передача, преобразование и накопление энергии или материала. Дозирование (регулирование) количества поступающего вещества или энергии осуществляется посредством регулирующего органа.
В качестве резюме определяющего понятие объекта управления могут выступать следующие заключения:
1) объект является управляемым, если в нем происходит передача, преобразование или накопление вещества или энергии;
2) объект считается управляемым, если он имеет регулирующий орган;
3) объект может быть управляемым в случае, если приток энергии или вещества изменяет состояние объекта, который характеризуется изменением его одного или нескольких параметров.
На объект управления все время оказывают влияние различных воздействий, в результате чего изменяются (варьируются) переменные управления, которые носят название выходных величин управляющих объектов.
Воздействие на объект управления может быть приложено как со стороны поступления энергии или вещество, так и на выходе из объекта. Все воздействия обычно разделяют на управляющие и возмущающие.
Объект управления характеризуется обычно некоторыми свойствами, количественное значение которых характеризуют показатели управляемости объекта. К таким характеристикам относят: самовыравнивание объекта, его аккумулирующая способность, а так же его реакцию на управляющее или возмущающее воздействие.
Под самовыравниванием понимают способность объекта самостоятельно приходить в новое состояние равновесия при изменении управляющего или возмущающего воздействия. Не все объекты управления обладают этим свойством. Так объекты управления, описываемые с помощью интегрирующих звеньев не обладают способностью к самовыравниванию, такие объекты называют астатическими. Объекты, которые обладают самовыравниванием называют статическими. Объекты без самовыравнивания крайне трудно поддаются регулированию. Самовыравнивание может быть как положительным так и отрицательным.
При положительном самовыравнивании равновесие в объекте создается без использования автоматических регуляторов. При отрицательном самовыравнивании возникшее нарушение равновесия стремится к нарастанию, поэтому используют автоматические регуляторы. При отрицательном самовыравнивании объект называется неустойчивым статическим объектом, а при положительном – устойчивым статическим объектом.
Количественное
самовыравнивание оценивается при помощи
коэффициента
самовыравнивания,
который равен отношению производной
от приращения внешнего воздействия к
производной от управляемой величины:
 ,
()
,
()
где
 - приращение возмущения в относительных
единицах;
- приращение возмущения в относительных
единицах;
 - приращение управляемой величины;
- приращение управляемой величины;
![]() номинальное значение возмущения и
управляемой величины
номинальное значение возмущения и
управляемой величины
Чем больше по значению коэффициент самовыравнивания, тем легче осуществить процесс автоматического регулирования. Сам процесс протекает быстрее и поэтому более качественно.
Большинству объектов управления в той или иной степени присуща инерционность, которая вызывает запаздывание во времени, изменение управляемой величины от управляющего воздействия. Запаздывание обычно бывает или переходным или транспортным. Переходное появляется из-за сопротивления из одной емкости в другую, или при переходе из одного состояния в другое.
Переходное запаздывание наблюдается в объектах, где имеются индуктивности, емкости, вращающиеся массы и т.п. характеристики. Оно определяется как промежуток времени от момента возмущения до начального изменения управляемой величины. Это запаздывание отрицательно влияет на процесс регулирования.
Разным объектам управления присущи различные запаздывания:
1) беземкостные объекты запаздывания не имеют;
2) одноемкостные объекты обладают только переходным запаздыванием;
3) двух и многоемкостные объекты обладают и транспортным и переходным запаздыванием.
Полное запаздывание в объектах определяется суммой имеющихся в объекте запаздываний. С точки зрения регулирования опасно влияние запаздывания в объекте, где отсутствует самовыравнивание.
Аккумулирующую
способность оценивают по емкости
объекта, под которым понимают количество
запасенной энергии и вещества. Чем
меньше емкость объекта, тем он
чувствительнее к возмущающим воздействиям.
Оценить аккумулирующую способность
объекта можно при помощи коэффициента
емкости,
под которым понимают то количество
энергии или вещества, которое необходимо
подвести к объекту управления (или
отвести от него), чтобы изменить
управляемую величину на единицу
измерения:
![]() ,
() где
,
() где
![]() емкость
объекта;
емкость
объекта;
![]() значение
управляемой величины.
значение
управляемой величины.
Самым
простейшим в теплотехнических расчетах
может являться коэффициент теплоемкости.
Значение емкости С
характеризует запас управляемой среды
в объекте. Если в процессе управления
емкость объекта не остается постоянной,
коэффициент емкости определяют как
отношение изменения емкости
![]() к изменению управляемой величины
к изменению управляемой величины
![]() :
:

 ()
()
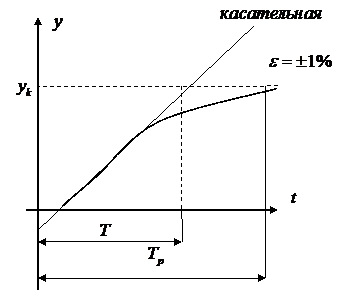
Изменение управляемой величины во времени графически выражается в виде кривой разгона объекта.
Рис.1.17.
Внешний
вид кривой разгона и основные параметры
процесса управления:
![]() конечное значение управляемой величины;
конечное значение управляемой величины;
![]() ордината точки перегиба (необходима
для нахождения постоянной времени);
ордината точки перегиба (необходима
для нахождения постоянной времени);
![]() постоянная времени – время разгона
объекта без самовыравнивания. При
наличии в объекте самовыравнивания и
емкости постоянная времени равна
промежутку времени, в течение которого
изменение управляемой величины от
установившегося параметра в
постоянная времени – время разгона
объекта без самовыравнивания. При
наличии в объекте самовыравнивания и
емкости постоянная времени равна
промежутку времени, в течение которого
изменение управляемой величины от
установившегося параметра в
![]() раз;
раз;
![]() время разгона – время, которое прошло
между подачей возмущения или воздействия
и моментом, когда управляемый параметр
достигнет нового установившегося
значения. На практике он соответствует
времени, когда управляемый параметр
достигнет 99% от конечного установившегося
результата.
время разгона – время, которое прошло
между подачей возмущения или воздействия
и моментом, когда управляемый параметр
достигнет нового установившегося
значения. На практике он соответствует
времени, когда управляемый параметр
достигнет 99% от конечного установившегося
результата.
Для
нахождения характеристик объекта
управления можно использовать следующие
формулы:
 ,
где
,
где
![]() - коэффициент самовыравнивания;
- коэффициент самовыравнивания;
 - чувствительность объекта. Время
разгона можно найти:
- чувствительность объекта. Время
разгона можно найти:
![]()