

1.2 What is control theory? - an initial discussion
Many areas of study are fortunate in that their titles trigger an immediate image of their scope and content. For instance, the names "human anatomy', 'veterinary medicine', 'aeronautical engineering' and 'ancient history' all conjure up coherent visions of well-defined subjects. This is not so for control theory although almost everyone is interested in control in the sense of being able to achieve defined objectives within some time frame. Rather specific examples occur in the named professions of ‘financial controller' and 'production controller'.
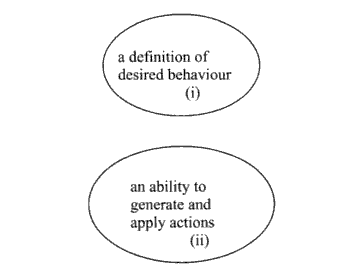
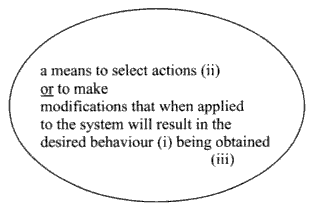
Fig.5 The three elements needed for successful control design
Control theory applies to everyday situations, as in the examples given above, just as well as it applies to the more exotic task of maneuvering space vehicles. In fact, the concepts of control theory are simple and application-independent. The universality of control theory means that it is best considered as applied to an abstract situation that contains only the topological core possessed by all situations that need to be controlled. Such an abstract situation is called a system.
The argument is that if we know how to control a highly general situation called a system then we shall be able to control any and every particular situation. This is the viewpoint of control theory and it is this viewpoint that gives it its extraordinary power.
Thus any situation, delineated from its environment for study, is called a system. When control theory wishes to study temperature regulation in the human body, it concerns itself with a system involving blood circulation, heat generation and heat loss mechanisms and decision-making by the brain. Systems can usefully be defined in almost any discipline they are not confined to science or engineering.
Control theory concerns itself with means by which to alter the future behaviour of systems. For control theory to be successfully applied, there needs to be available:
A purpose or objective that is linked with the future state of the system. (Clearly the past cannot be influenced nor, since no response can take place in any system in zero time, can the present.)
The objective of any control system in every case is connected with the performance of the system over some period of time – the accountant and the industrial manager want to see long periods of smooth and profitable operation. Sometimes this leads to conflicting requirements, in the sense that short term objectives are frequently in direct opposition to long term objectives. In general terms this objective can be considered to be the desired behaviour of the system.
(2) A set of possible actions that offers an element of choice. (If no variation of actions is possible, control cannot be exercised and the system will follow a course that cannot be modified.)
(3) (Unless a trial and error strategy is to be adopted) some means of choosing the correct actions (ii) that will result in the desired behaviour (i) being produced.
In general terms, this requirement is met by a model capable of predicting the effect of control actions on the system state. Such a model may be implicit and not even recognized as a model or it may consist of a large and complex set of equations.
For the accountant, the model is a balance sheet together with inherited wisdom. For the military commander, the model is a map of local terrain and a knowledge of the types and deployments of men and equipment. For the control of quantities that can be measured by sensors, mathematical models in the form of stored curves or sets of equations will usually be used.
We see then that to achieve successful control we must have a defined objective and be able to predict adequately, over some sufficient time scale, all the outcomes of all the actions that are open to us. For instance, a national power station building program can only be planned once predictions of the future demand for electricity are available. Figure 5 summarizes the three requirements needed for successful control.
A major problem in control using a long term horizon is uncertainty of the long term accuracy of models, compounded by the likelihood of unforeseen events. That is to say, the possibility must be faced that, once uncertainty rises above a particular level, no meaningful control can be implemented and that policies that look ahead to anticipate future contingencies may call for immediate sacrifices that will never be repaid by the creation of more favourable future environments.
Feedback control, in which an error initiates corrective action, can be used only where corrective actions take effect relatively quickly. It is clearly unsatisfactory to wait until electricity demand exceeds the maximum possible supply level before starting to build a new power station. On the other hand, it is usually perfectly feasible to control the speed of a motor by an error-driven feedback correction.
None of the processes that we are called upon to control can be made to change its state instantaneously. This is because all processes have the equivalent of inertia. Suppose that we have the task of moving a large spherical boulder from A to B by brute force (Figure 6).
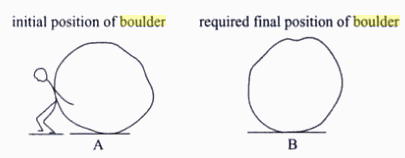
Fig.6 The problem of moving the boulder
Clearly, considerable initial effort must be expended to get the boulder rolling and a similar effort must be expended to bring it to rest. In the case illustrated, it will be all too easy to overshoot the target or to spend too long arriving there if any miscalculation is made. The difficulty of achieving control in this situation is entirely typical and occurs because of the energy that needs to be stored in and then removed from the boulder to allow the task to be achieved. Only when we possess a prior quantitative knowledge of the energy storage mechanism can we hope to achieve fast and accurate control.
A system with internal energy storage is called a dynamic system. Thus, we can see that one of our chief problems is to synthesize actions that, when applied to a dynamic system, will produce the response that we are seeking.