

Lecture 1.1
The general notions about Automatic control theory
General systems ideas
Mathematical basics of automatic control theory
System classifications
1 Structural arrangement of syllabus (curriculum).
4th semester:
1st module: Mathematical description of linear control systems
Motion equations of control systems
Typical input signals
Time response and frequency characteristics of control systems
Characteristics of typical dynamic links
12 lectures, 4x6 (24 hours) laboratory works
1st Module test.
2nd module: The stability of linear feedback systems;
The connection diagrams of dynamic links
Mason’s gain rule
Structural analysis of control systems
The behaviour of control systems at random input signals
Nyquist criterion
Frequency characteristics of control systems
Defining the stability parameters of linear feedback systems
13 lectures, 5x6 (30 hours) laboratory works
2nd Module test
Home work (the task is to define the motion equations of the control systems in question, its parameters and to simulate this control system).
Differentiated test
5Th semester:
3Rd module: Performance parameters of control systems
Performance parameters of control systems
Steady-state errors of control systems
Control systems design methods
Root locus design methods
PID regulators
12 Lectures, 4x6 (24 hours) laboratory works
3rd module test;
4Th module: Modern automatic control theory
Nonlinear control systems
State space models of control systems
Controllability and observability.
12 lectures, 4x6+2 (26 hours) laboratory works
4th module test;
Term paper (the task of the term paper is to construct and transform block diagram of the control system in question, define control laws, stability and performance parameters, to obtain the desired parameters of the control system, to carry out its dynamic simulation).
Exam
1.1 General systems ideas
The objects under study in control theory are systems. A system is any set of elements connected together by information links within some delineated system boundaries.
Referring to Figure 1.1, note that the system boundary is not a physical boundary but rather a convenient fictional device. Note also how information links may pass through the system boundary.
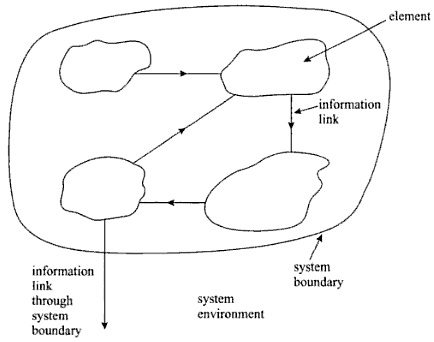
Fig.1 The structure of a system
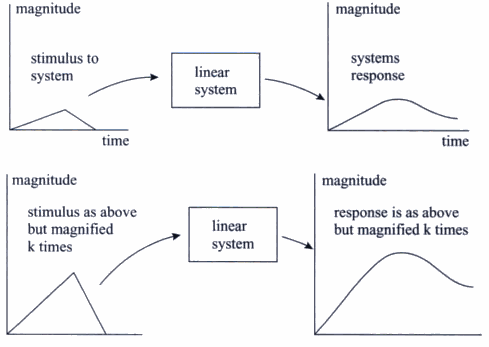
Fig.2 Linear system characteristics
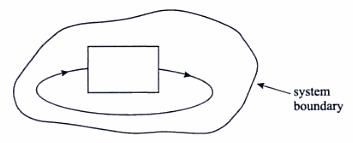
Fig.3 A simple feedback system
Since control theory deals with structural properties, it requires system representations that have been stripped of all detail, until the main property that remains is that of connectedness. (The masterly map of the London Underground system is an everyday example of how useful a representation can be when it has been stripped of all properties except that of connectedness.)
environment
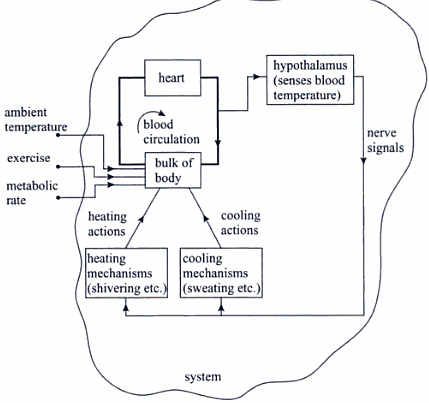
Fig.4 A simple representation of the human temperature regulation system
Metabolism is the set of chemical reactions that happen in living organisms to maintain life.
Connectedness is a concept from topology. Topology, the discipline that studies the underlying structure of mathematics, offers fascinating reading to aspiring systems theorists. Recommended reading is given in the Bibliography. Clearly, a system is a very general concept; control theory is most interested in certain classes of system and to make progress we delineate the classes. First it is interested in dynamic systems - these arc systems whose behaviour over a time period is of interest. Thus if a system were concerned with population aspects, a similar dynamic system would be concerned with population growth.
Secondly, it is most interested in and most powerful when dealing with linear systems. A linear system is characterized by the property shown in Figure 1.2. The upper part of the figure shows a system's response to some arbitrary stimulus. The lower part shows how, in the presence of linearity, the response to a scaled-up version of the stimulus is simply a scaled-up version of the previous response, with proportionality being preserved.
Finally, it is interested in feedback systems - these are systems where information flows in one or more loops, so that part of the information entering an element may be information that previously left that element (Figure 1.3).
Systems arc often visualized in the form of block diagrams, illustrating the main functions, their supposed interconnection and (possibly) their interconnection to the environment of the system. Thus, a simple representation of the human temperature regulation system might be as shown in Figure 1.4.