

Лекция 17
Пуск двигателей постоянного тока.
Пуск двигателя можно осуществить прямым включением в сеть, введением реостата в цепь якоря или же изменением напряжения источника питания. Пуск непосредственным включением применяется для двигателей небольшой мощности (до 1 - 2 квт). Сначала в обмотке якоря отсутствует против ЭДС и бросок тока превышает Iном в 8-10 раз, а механический удар воздействует на детали передачи. Большие толчки тока вредно отражаются на работе остальных потребителей. У малых двигателей разгон происходит быстро (0.1 - 0.3 с), якорь не успевает нагреться, а толчок тока небольшой. Для ограничения I в цепь якоря включён пусковой реостат, сопротивление которого по мере разгона постепенно выводится Iп = U/(rя + rп ). r выбирается так, чтобы Iп/Iном = 1,5 - 2,5.
В процессе разгона в якоре появляется против ЭДС и:
I = (U - E)/(rя + rп).
По мере увеличения ω возрастает Е и при r = const уменьшается Iя и момент, развиваемый двигателем. Когда М = Мс возрастание ω прекращается и т.д. Пуск происходит быстро и легко, когда двигатель развивает значительный момент, превышающий Мс. Поэтому пуск производится при Фмах, для чего реостат в цепи возбуждения полностью выводится. Схема двигателя должна быть собрана так, чтобы Iв не зависел от Iя и не изменялся пи манипуляциях с пусковым реостатом. Поэтому цепь возбуждения всегда включается на независимое питание от источника. При остановке двигателя и отключении его следует ввести rп и вывести регулировочное rр в цепь возбуждения, т.е. подготовить двигатель к следующему пуску.
При пуске двигателя с независимым возбуждением сначала надо включить цепь возбуждения и только после этого подключить цепь якоря с введённым rп.
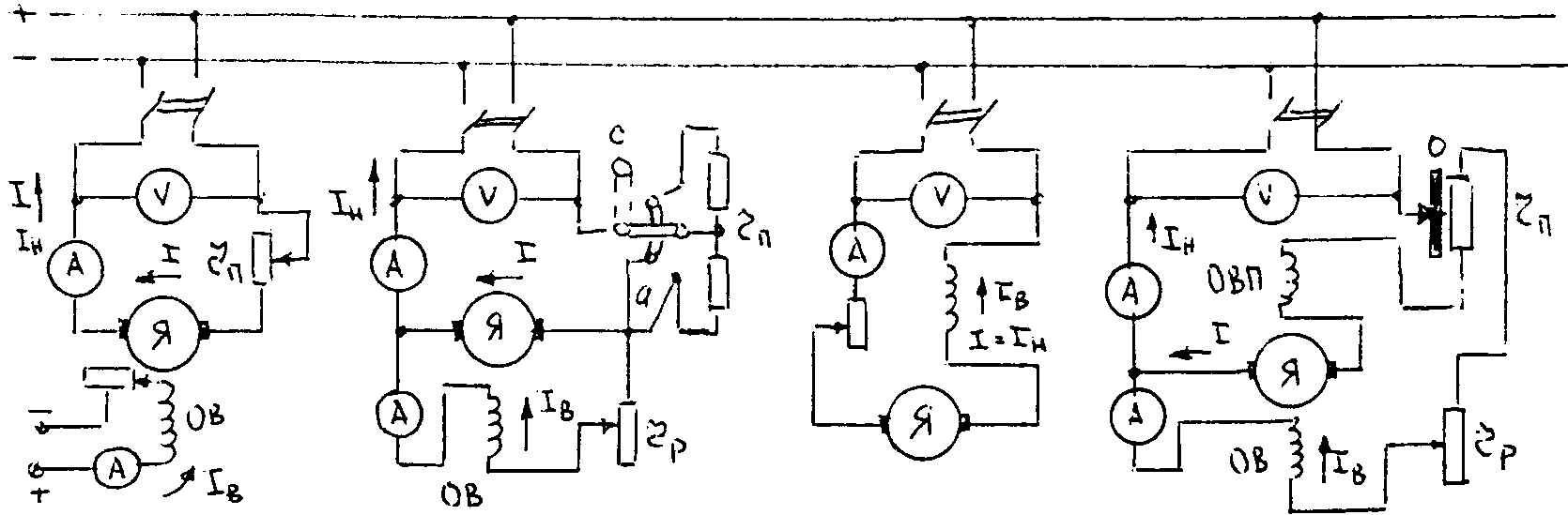
Рис. 53. Схемы включения двигателей постоянного тока.
При параллельном возбуждении движок пускового реостата одновременно скользит по пластине, к которой присоединён один из зажимов цепи возбуждения, чем обеспечивается независимое питание её от источника. С пластиной же соединён начальный конец пускового реостата. При отключении движок пускового реостата ставится в положение О и не касается ни начального контакта пускового реостата, ни пластины а. Цепь возбуждения остаётся замкнутой на пусковой реостат и якорь, которые поглощают энергию, запасенную в обмотке возбуждения. Учитывая, что E=const, имеем ω = [U - I(rя + rп)]/c Ф0. По мере уменьшения тока скорость возрастает по линейному закону. При различных r получаем семейство прямых, пересекающихся в точке идеального Х.Х. I = 0; ω0 = U/c Ф0.
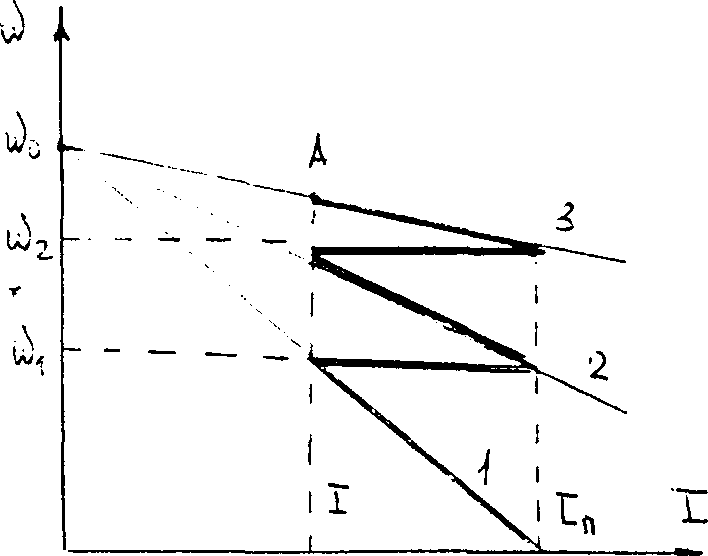
Рис 54. Процесс пуска.
При включении rп велико и скорость быстро возрастает (1) до ω, при котором I обеспечивает создание электромагнитного момента, равного моменту сопротивления. Если вывести первую ступень rп, ток и М увеличатся скачком, что приведёт к увеличению ω до ω2(2). Выводя последнюю ступень rп, переходим на естественную характеристику двигателя (3), получая конечное значение ω, соответствующее точке А. У двигателя с последовательным возбуждением невозможно перед включением якоря установить наибольший поток. Пуск осуществляется включением в сеть и постепенным введением r . При отключении не надо принимать особые меры для поглощения энергии ОВП, т.к. w невелико.
Включение двигателя со смешанным возбуждением в принципе такое же, как и двигателя с параллельным возбуждением.
Реверсирование и регулирование скорости двигателей П.Т.
Реверсирование - изменение направления вращения якоря - достигается изменением направления тока в якоре при неизменной полярности полюсов или изменением направления тока возбуждения при прежнем направлении тока якоря. Напряжение на зажимах якоря двигателя покрывает против ЭДС Е и падение в цепи якоря I rя.
ω = (U - I rя)/c Ф0.
Следовательно, скорость (частоту вращения ω) наиболее распространённых двигателей независимого возбуждения можно регулировать тремя основными способами: а) изменением r в цепи якоря при введении добавочных r; б) изменением Iв и зависящего от него магнитного потока; в) изменением напряжения на зажимах якоря.
Потери в машинах П.Т.
При работе М.П.Т. имеют место потери: электрические, механические и магнитные. К электрическим относятся потери во всех обмотках и переходном слое щёток. Магнитные потери - потери на вихревые токи и гистерезис в стали якоря, который подвергается вращательному перемагничиванию. Механические потери р определяются трением в подшипниках, щёток о коллектор и вращающихся деталей о воздух. К ним относятся потери мощности на работу вентилятора. Добавочные потери рд - в полюсных наконечниках из-за пульсаций индукции вследствие зубчатости якоря и др.
Суммарные потери:
∑р = рэл + рс + рд + рмех.
М.П.Т. мощностью от долей ватта до тысяч квт широко применяются в народном хозяйстве. Распространены М.П.Т. с U = 110 (115), 220 (230), 440 (460) B. Двигатели П.Т. используются при необходимости регулирования скорости в широких пределах, а также получения высоких скоростей.