

Измерители и показатели тормозной динамичности. Расчетное определение тормозных сил.
Измерителями тормозной динамичности автомобиля являются замедление, время и путь торможения в определенном интервале скоростей, а также суммарная тормозная сила. Для их определения рассмотрим подробнее процесс экстренного торможения (рис. 6).
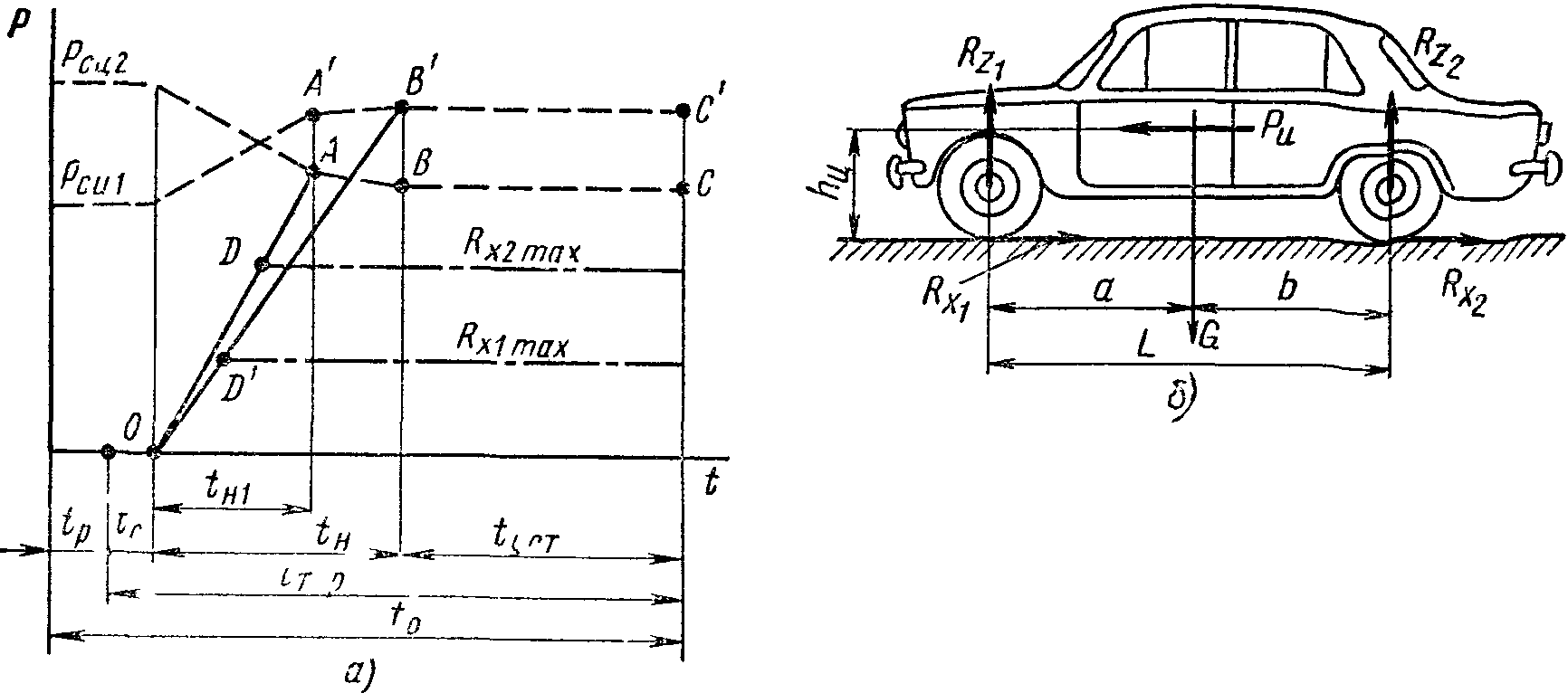
Рис. 6. Показатели тормозной динамичности автомобиля: а – зависимость сил сцепления от времени; б – схема сил, действующих на автомобиль.
Водитель, заметив препятствие, оценивает дорожную обстановку, принимает решение о торможении, переносит ногу с педали подачи топлива на тормозную педаль. Время tр, необходимое для этих действий (рис. 6, а), – время реакции водителя. Время tc (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей. В течение времени (tp+ tc) автомобиль продолжает двигаться равномерно с начальной скоростью vo. В конце этого периода возникают тормозные силы Rx1 и Rx2, вызывающие замедление движения. Определим их, пренебрегая сопротивлением дороги и воздуха, и приняв коэффициент учета вращающихся масс равным единице.
Согласно условиям равновесия:
Pи = Ma jз = Rx1 + Rx2, (17)
![]() , (18)
, (18)
![]() , (19)
, (19)
где Ма – масса автомобиля; jз – замедление автомобиля (отрицательное ускорение); Rx1 и Rx2 – касательные реакции дороги, действующие на колеса переднего и заднего мостов автомобиля; Rz1 и Rz2 – нормальные реакции дороги; а, b и hц – расстояния соответственно от центра тяжести автомобиля до переднего и заднего мостов и до поверхности дороги.
Предельное значение касательной реакции дороги, обусловленное сцеплением шины с дорогой, называется силой сцепления Рсц. Силы сцепления для переднего Рсц1 и заднего Рсц2 мостов автомобиля определяют по следующим формулам:
![]() ,
(20)
,
(20)
, (21)
где jх – коэффициент сцепления.
Чтобы полностью использовать сцепление всех шин автомобиля с дорогой, конструкция тормозной системы должна создавать разное соотношение тормозных сил Rx1 и Rx2 при торможении с различной интенсивностью. Указанное требование трудно выполнимо, и большинство автомобилей имеют тормозные системы, обеспечивающие постоянное соотношение, тормозных сил. У таких автомобилей колеса переднего и заднего мостов блокируются не одновременно. Этот недостаток устраняют путем применения регуляторов тормозных сил, противоблокировочных устройств и АБС.
Если заторможенные колеса еще продолжают вращаться (не заблокированы), то реакции Rx1 и Rx2 можно считать приблизительно пропорциональными тормозным моментам. Увеличение тормозного момента, приложенного к колесу, вызывает рост касательной реакции, который продолжается до тех пор, пока она не достигнет максимального значения, обусловленного сцеплением шины с дорогой – (20), (21). При экстренном торможении тормозные моменты можно без большой погрешности аппроксимировать линейными функциями времени.
Изменение реакций Rx1 и Rx2 по времени показано на рис. 6, а сплошными линиями. У легковых автомобилей центр тяжести расположен примерно посередине базы. При их торможении нагрузка на передний мост больше, чем на задний; для более полного использования сцепления передних шин с дорогой тормозную систему конструируют так, чтобы тормозная сила, действующая на передний мост росла быстрее. У грузовых автомобилей и автобусов основная часть нагрузки (до 70%) приходится на задний мост, и тормозная сила, действующая на него, должна расти быстрее, чем тормозная сила, действующая на передний мост.
Нормальные реакции дороги Rz1 и Rz2, действующие на передний и задний мосты автомобиля, в свою очередь зависят от интенсивности торможения, изменяясь с изменением замедления jз.
В первый период торможения предельное значение касательной реакции (силы сцепления) на колесах переднего моста увеличивается с течением времени, а на колесах заднего уменьшается. Если считать коэффициент сцепления постоянным, то силы Рсц1 и Рсц2 после начала торможения изменяются пропорционально времени, как показано на рис. 6, а штриховыми линиями.
За время tн1 касательная реакция на колесах одного из мостов (чаще всего заднего) достигает предельного значения по условиям сцепления, и колеса этого моста блокируются (точка А). После этого касательная реакция на передних колесах по-прежнему растет (точка А') в соответствии с формулой (20), а реакция Rx2 (участок АВ) уже не зависит от тормозного момента. Водитель может прикладывать к педали сколь угодно большое усилие, все равно эта реакция будет уменьшаться с течением времени, оставаясь равной силе сцепления. Однако уменьшение касательной реакции на задних колесах вызывает уменьшение силы инерции Ри, что в свою очередь, отражается на динамическом перераспределении нагрузок и величинах нормальных реакций дороги.
Спустя время tн блокируются колеса и переднего моста, так как предельного значения по условиям сцепления достигает сила Rx1 (точка В'). После этого касательные реакции на колесах обоих мостов автомобиля становятся равными силам сцепления (участки ВС и В'С'), т.е. достигают максимальных значений.
Закон изменения касательной реакции на колесах переднего моста в процессе торможения характеризуется линией OB'C', а на колесах заднего – линией ОАВС. Если считать коэффициент сцепления постоянным, то в третьем периоде (время полного торможения) касательные реакции также постоянны.
Выше предполагалось, что тормозные силы могут беспрепятственно достигать предельных значений по условиям сцепления. Практически, у многих моделей автомобилей тормозные моменты часто оказываются недостаточными для блокировки колес даже при полном использовании конструктивных возможностей автомашины, и колеса продолжают вращаться до остановки автомобиля. Рост касательных реакций прекращается в точках D и D', после чего они остаются примерно постоянными и равными Rx1max и Rx2max (штрихпунктирные линии). Иногда блокируются колеса только одного моста (чаще всего заднего). Тормозные моменты на колесах другого моста недостаточно велики для доведения их до юза, и колеса продолжают вращаться.
Так, например, для автомобилей с большой массой нужны тормоза с большими поверхностями трения. Однако большие тормоза трудно разместить внутри колес, а увеличение их массы нежелательно по соображениям плавности хода автомобиля. Поэтому максимальные значения касательных реакций грузовых автомобилей большой грузоподъемности и автобусов большой вместимости обычно меньше силы сцепления. Показатели тормозной динамичности таких автомобилей ниже, чем у автомобилей, имеющих меньшую массу. Кроме того, иногда конструкторы, стремясь предотвратить блокировку передних колес и потерю управляемости при торможении, ограничивают максимальную величину тормозных моментов на колесах переднего моста, что также приводит к неполному использованию сцепления с дорогой и ухудшению динамичности.