

18,19 Потенциальное силовое поле. Потенциальная энергия.
Силовое
поле
- часть пространства, в каждой точке
которого на помещенную в ней материальную
точку действует сила, зависящая только
от положения этой точки. Потенциальное
силовое поле
- это стационарное (не изменяющееся во
времени) поле, работа сил которого не
зависит от формы траектории точки, а
только от ее начального и конечного
положений. Силовая
функция
потенциального поля - такая функция,
что:
 .
Потенциальные
силы
- силы потенциального поля. Элементарная
работа потенциальной силы
равна полному дифференциалу силовой
функции:
.
Потенциальные
силы
- силы потенциального поля. Элементарная
работа потенциальной силы
равна полному дифференциалу силовой
функции:

 .
.
Элементарная работа силы потенциального поля равна полному дифференциалу силовой функции:
![]()
Полная работа потенциальной силы равна разности значений силовой функции в начальном и конечном положении точки. На замкнутом перемещении равна нулю.
Потенциальная
энергия
- величина, отличающаяся от силовой
функции, взятой с отрицательным знаком,
на постоянную величину - нулевое значение
силовой функции. A = u0
- u = П. Проекции потенциальной силы,
действующей на материальную точку
равны взятым с отрицательным знаком
частным производным от потенциальной
энергии по соответствующим координатам:
 .
.
Эквипотенциальная поверхность - поверхность равного потенциала, единственная для каждой точки поля - ГМТ с постоянным значением потенциальной энергии.
Консервативная система (от лат. conservo — сохраняю), механическая система, для которой имеет место закон сохранения механической энергии, т. е. сумма кинетической энергии Т и потенциальной энергии П системы постоянна: Т + П = const.
Работа силы на конечном перемещении точки в потенциальном силовом поле. Потенциальная энергия.
Работа силы потенциального поля при перемещении точки из положения М1 в положение М2. (рис. 23).
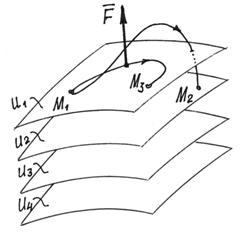 Рис.23
Рис.23
Элементарная работа,
![]()
Это есть полный дифференциал силовой функции.
Работа на конечном перемещении
![]() где
u2 и u1 – значения силовой функции в
точках М2 и М1.
где
u2 и u1 – значения силовой функции в
точках М2 и М1.
Работа силы потенциального поля не зависит от траектории движения точки, а определяется лишь значениями силовой функции в начальном и конечном положениях точки. Если точка вернется в начальное положение, работа силы будет равна нулю. Работа окажется равной нулю и при переходе в другую точку М3, если там значение силовой функции будет такое же, как и в начальном положении. Точки с одинаковыми значениями силовой функции будут образовывать целую поверхность. силовое поле – это слоеное пространство, состоящее из таких поверхностей (рис. 23). Эти поверхности называются поверхностями уровня или эквипотенциальными поверхностями. Уравнения их: u(x, y, z)=C (C – постоянная, равная значению u в точках этой поверхности). А силовую функцию называют, соответственно, потенциалом поля. Эквипотенциальные поверхности не пересекаются. Иначе существовали бы точки поля с неопределенным потенциалом. Поскольку, при перемещении точки по эквипотенциальной поверхности работа силы равна нулю, то вектор силы перпендикулярен поверхности. Работа, которую совершит сила при переходе точки из определенного места М на нулевую поверхность, называют потенциальной энергией точки в этом определенном месте М:
![]() (8)
(8)
Заметим, что потенциальная энергия в одной и той же точке поля зависит от выбора нулевой поверхности. По (8) силовая функция . Поэтому проекции силы на декартовы оси, по (6), так как ,
![]() ;
;
![]() ;
;
![]() (9)и вектор силы .
(9)и вектор силы .![]()