

Начертите структурную схему автоматизированного электропривода в виде совокупности силовых и управляющих элементов. Приведите классификацию элементов автоматизированного электропривода.
Под термином «элемент» автоматизированного электропривода понимается входящее в него устройство выполняющее определенную функцию управления, в соответствии с которой входное воздействие элемента преобразуется в выходное.
АЭП можно представить в виде совокупности силовых и управляющих элементов (рисунок 1). Силовые элементы преобразуют, регулируют и приводят к рабочему органу (РО) механизма основной поток энергии, к ним относятся: управляемые преобразователи энергии (УПЭ), электродвигатели (М), передаточные механизмы (ПМ), рабочие органы машин и механизмов. Управляющие элементы формируют, преобразуют и подводят сигналы управления к силовым элементам.
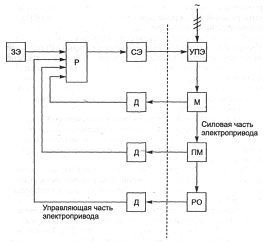
Рисунок 1 - Структурная схема автоматизированного электропривода в виде совокупности
силовых и управляющих элементов
Управляющие элементы можно разделить на две группы:
элементы систем управления вентилями УПЭ, которые преобразуют сигнал управления с выхода системы автоматического управления (САУ) в открывающие импульсы;
элементы САУ, формирующие задающие и управляющие воздействия и определяющие статические и динамические свойства АЭП.
По функциональному признаку элементы второй группы делятся на следующие виды:
регуляторы (Р), которые вычисляют разность сигналов задания и обратной связи (рассогласование) и на её основе формируют управляющее воздействие, приводящее регулируемую координату к заданному значению;
датчики (Д), преобразующие управляемую координату в электрический сигнал, используемый как сигнал обратной связи;
задающие элементы (ЗЭ), которые формируют задающие воздействия, определяющие технологическую программу работы АЭП;
согласующие элементы (СЭ), которые согласуют выходные и входные координаты соединяемых элементов по роду тока, виду и уровню сигналов и т.п.
Начертите схемы пропорционального, интегрального и пропорционально-интегрального регуляторов и их временные диаграммы работы.
Регулятор выполняет вычисление рассогласования (разность между сигналом задания и сигналом обратной связи) и его преобразование в управляющее воздействие в соответствии с определенной математической операцией.
В САУ используются в основном следующие типы регуляторов: пропорциональный (П), интегральный (И) и пропорционально-интегральный (ПИ). В зависимости от вида преобразуемых сигналов различают аналоговые и цифровые регуляторы.
Аналоговые регуляторы (АР) реализуются на основе операционных усилителей, цифровые — на основе специализированных вычислительных устройств или микропроцессоров. Аналоговые регуляторы преобразуют только аналоговые сигналы, являющиеся непрерывными функциями времени. При прохождении через АР преобразуется каждое мгновенное значение непрерывного сигнала.
Для реализации АР операционный усилитель (ОУ) включается по схеме суммирующего усилителя с отрицательной обратной связью. Тип регулятора и его передаточная функция определяются схемой включения резисторов и конденсаторов в цепях на входе и в обратной связи ОУ.
Пропорциональный регулятор (П-регулятор) реализуется при включении в цепь обратной связи ОУ резистора с сопротивлением Rос. Этот регулятор характеризуется коэффициентом пропорциональности к, который может быть равен как больше, так и меньше единицы.
Интегральный регулятор (И-регулятор) реализуется при включении в цепь обратной связи ОУ конденсатора Сос. Этого тип регулятора характеризуется постоянной времени Т.
Пропорционально-интегральный регулятор (ПИ-регулятор) реализуется при включении в цепь обратной связи ОУ резистора с сопротивлением Rос и конденсатора Сос. Такой регулятор характеризуется следующими параметрами: коэффициентом пропорциональности к и постоянной времени Т.
Для всех типов регуляторов в схеме реализации имеется входное сопротивление R1.
Схемы реализации регуляторов, зависимость напряжения на выходе регулятораUвых от входного Uвх и их графическое изображение, а также формулы для нахождения параметров регуляторов приведены в таблице 1
Таблица 1 - Регуляторы

Объясните, для чего предназначены датчики тока, какие к ним предъявляются требования. Приведите функциональные схемы электропривода постоянного тока с трансформаторным датчиком тока и датчиком тока на основе шунта.
Датчики тока (ДТ) предназначены для получения информации о силе и направлении тока двигателя. К ним предъявляют следующие требования:
• линейность характеристики управления в диапазоне от 0,1Iном до 5Iном не менее 0,9;
• наличие гальванической развязки силовой цепи и системы управления;
• высокое быстродействие.
![]()
Рисунок 1 – Структурная схема датчика координат АЭП
В качестве измерительных преобразователей в ДТ используются трансформаторы тока, дополнительные (компенсационные) обмотки сглаживающих дросселей, элементы Холла, шунты.
Широкое распространение для измерения тока двигателей получили датчики тока на основе шунтов. Шунт представляет собой четырехзажимный резистор с чисто активным сопротивлением Rш (безындуктивный шунт), к токовым зажимам которого подключается силовая цепь, а к потенциальным — измерительная. (рисунок 2)
Д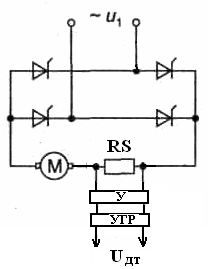 ля
ослабления влияния шунта на прохождение
тока в цепи двигателя его сопротивление
должно быть минимальным. Номинальное
падение напряжения на шунте составляет
обычно 75 мВ, поэтому его необходимо
усилить с помощью усилителя У. Так как
шунт имеет потенциальную связь с силовой
цепью, датчик тока должен содержать
устройство гальванической развязки
(УГР). В качестве таких устройств
применяются трансформаторные и
оптоэлектронные устройства.
ля
ослабления влияния шунта на прохождение
тока в цепи двигателя его сопротивление
должно быть минимальным. Номинальное
падение напряжения на шунте составляет
обычно 75 мВ, поэтому его необходимо
усилить с помощью усилителя У. Так как
шунт имеет потенциальную связь с силовой
цепью, датчик тока должен содержать
устройство гальванической развязки
(УГР). В качестве таких устройств
применяются трансформаторные и
оптоэлектронные устройства.
Рисунок 2 – Схема включения датчика тока на основе шунта
ДТ на основе трансформаторов тока в основном используются в АЭП постоянного тока для измерения тока двигателей при питании их от симметричных мостовых однофазных и трехфазных выпрямителей. Для однофазного выпрямителя (рисунок 3) используется один трансформатор тока (ТА1), а для трехфазного — три трансформатора, включенных в звезду. Для обеспечения режима работы трансформаторов тока, близкого к режиму короткого замыкания, их вторичные обмотки нагружаются низкоомными резисторами RТТ (0,2...1,0 Ом). Преобразование переменного напряжения вторичных обмоток осуществляется выпрямителем VD1...VD4 .

Рисунок 2 – Схема включения датчика тока на основе трансформатора тока
Приведите функциональную схему датчика ЭДС якоря, объясните принцип её действия.
При невысоких требованиях к диапазону регулирования скорости (до 50) в качестве главной обратной связи в электроприводе применяется обратная связь по ЭДС. Принцип действия датчика ЭДС якоря основан на вычислении ЭДС двигателя.

Рисунок 1 – Функциональная схема датчика ЭДС якоря
Для измерения напряжения якоря используется делитель на резисторах R2, R3 . Для измерения тока якоря двигателя используется дополнительная обмотка L1.2 сглаживающего дросселя. Напряжение ия через делитель, RС-фильтр и повторитель А1 подается на сумматор А2. На вход сумматора А2 подается также сигнал, пропорциональный падению напряжения на обмотке якоря Rя.ц ∙iя.
Выражение выходного напряжения uдэ усилителя А2 для установившегося режима работы имеет вид
![]()
где кдэ – коэффициент передачи датчика ЭДС,
ея – ЭДС якоря.

Рисунок 2 – Схема включения датчика напряжения
Выходное напряжение делителя равно
![]()
Датчик напряжения помимо делителя может содержать также устройства гальванической развязки и
усилитель.