

Приведите структурную схему автоматизированного электропривода , перечислите её основные блоки и их назначение. Дайте классификацию систем управления электроприводами и укажите требования, предъявляемые к ним
Автоматизированный электропривод (АЭП) представляет собой электромеханическую систему, состоящую из автоматического управляющего устройства (АУУ), преобразователя мощности, передаточного устройства и электродвигателя, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением. Структурная схема такого электропривода приведена на рисунке 1. Электродвигатель и рабочая машина представляют собой объект управления.
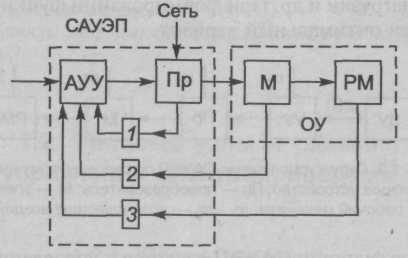
М — электродвигатель; РМ — рабочий механизм; ОУ — объект управления;
1-3 — обратные связи
Рисунок 1 - Структурная схема автоматизированного электропривода
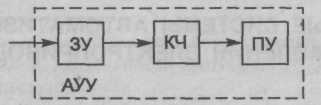
Рисунок 2 - Структурная схема автоматического управляющего устройства
Система автоматического управления электроприводом (САУЭП) состоит из автоматического управляющего устройства и преобразователя, которые воздействуют на объект управления.
Выходными параметрами электропривода являются: скорость, ускорение, угол поворота, момент, мощность. В процессе управления эти величины могут регулироваться по определенному закону либо стабилизироваться.
Основные функции САУЭП сводятся к управлению процессами пуска, торможения и реверса электродвигателя, стабилизации координат электропривода, выполнению слежения за изменяющимися параметрами, программному и адаптивному управлению, защите электрических цепей, обеспечению заданной последовательности операций с отдельными элементами и узлами.
Требования, предъявляемые к сауэп
1 Требование технического задания (диапазон регулирования скорости; точность поддержания скорости; точность позиционирования).
2 Удобство и гибкость управления.
3 Удобство монтажа и ремонта.
4 Удобство наладки и диагностики.
5 Минимальные габариты и стоимость, масса.
6 Надежность СУ
7 Требование техники безопасности и пожарной безопасности.
Классификация сауэп
1) По принципу действия (зависит от типа двигателя).
2) По типу используемого преобразователя.
3) Дискретные и непрерывные.
4) По типу задач управления
5) Линейные и нелинейные системы.
6) Разомкнутые, замкнутые и комбинированные системы.
Опишите принципы автоматического управления пуском и торможением двигателей. Укажите достоинства и недостатки каждого из принципов.
При автоматическом управлении ЭП и технологическим процессом может применяться управление в функции мощности, момента, натяжения, температуры, цвета, числа операций и др.
Переключение искусственных характеристик, закорачивание пусковых ступеней, т. е. включение и отключение контакторов ускорения, кроме перечисленных, можно осуществлять:
1)по принципу тока,
2)по принципу скорости,
3)по принципу времени.
Принципы управления отличаются друг от друга, имеют свои достоинства и недостатки. Их надо оценивать:
1)с точки зрения реализации схемы, ее эксплуатации,
2)с точки зрения качества управления при изменение параметров системы.
Управление по принципу времени.
Оно осуществляется с помощью аппаратов, контролирующих время, т. е. реле времени, настраиваемых на отсчет заданных выдержек времени. Каждое реле включает или отключает отдельный контактор, который закорачивает главным контактом или вводит нужную ступень пускового или тормозного сопротивления.
Схемы управления по принципу времени достаточно просты, могут использоваться однотипные реле времени, которые предусматривают настройку выдержки. Однако реле времени сложнее обычных реле, менее надежны, дороже, имеют большие габариты.
Управление по принципу скорости.
Оно производится с помощью реле, контролирующих угловую скорость двигателя непосредственно или косвенно. По достижении заданного значения скорости соответствующее реле выдает команду на включение контактора ускорения. При косвенном управлении используются величины, пропорциональные угловой скорости двигателя (для ДПТ – через амплитуду ЭДС якоря E=Cω; для АД с фазным ротором – через амплитуду ЭДС и частоту тока ротора).
С точки зрения реализации схемы управление по принципу скорости наиболее выгодны, т. к. используются обычно дешевые электрические аппараты. Однако разгон привода при этом принципе происходит медленнее.
Управление по принципу тока.
Оно осуществляется путем применения реле минимального или максимального тока. Эти реле включают контакторы ускорения в моменты увеличения или уменьшения тока двигателя до заданного значения.
Схемы управления по принципу тока недостаточно надежны, возможны ложные включения контакторов ускорения и возникновения сверхтоков. Ограничена возможность настройки тока отпускания и тока включения. Требуется применение специальных реле. Более целесообразно применение принципа тока при управлении потоком возбуждения.