

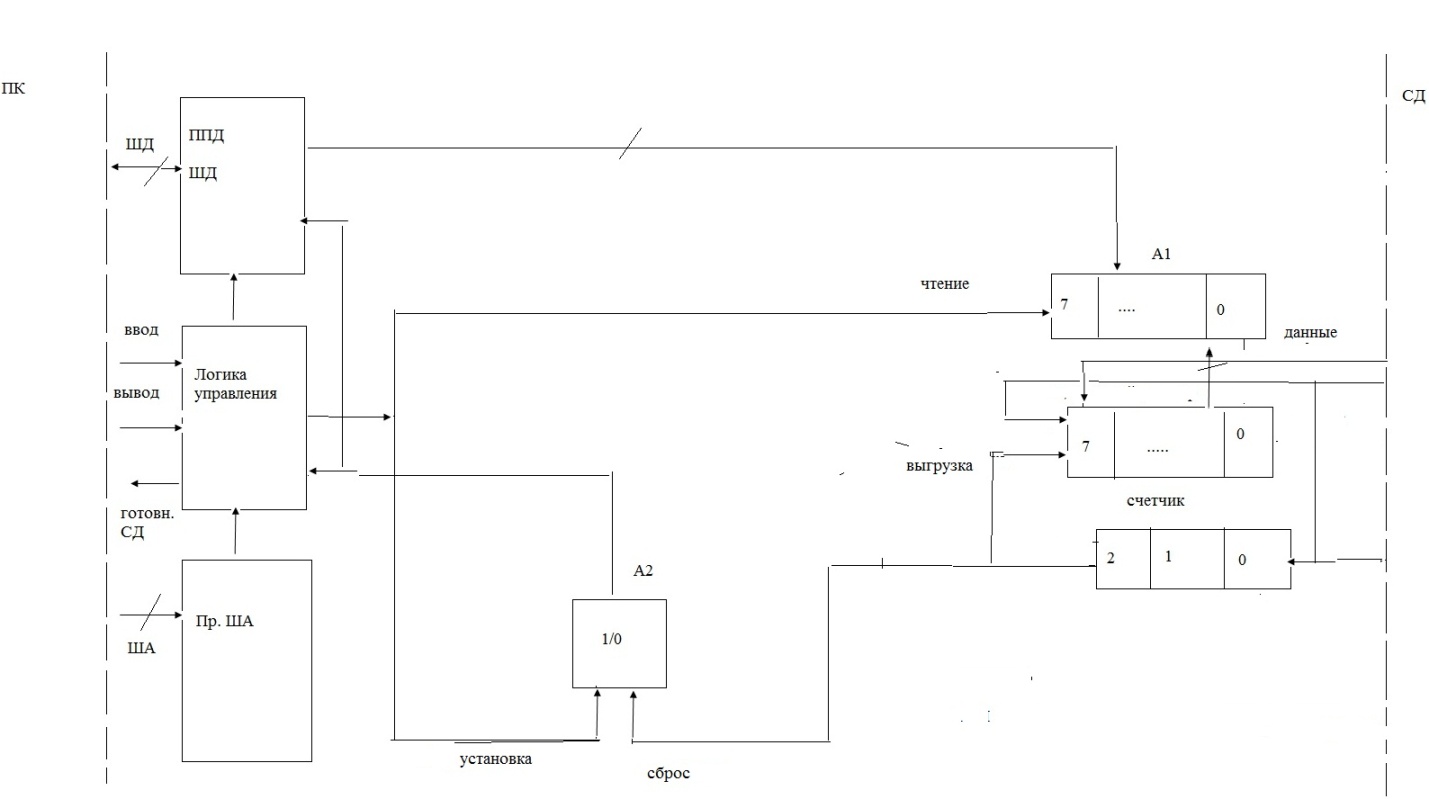
8.3 Контроллер последовательного синхронного приема.
Контроллер последовательного синхронного приема данных из СД состоит из тех же блоков, кроме ГТИ.
Подпрограмма: (под вопросом)
M1 TST, @#A2
BPL M1
MOV А1, @#R1
Алгоритм:
Процессор циклически опрашивает состояние регистра А2. В цикле «ввод» на ША выставляется адрес А2 и с помощью логики управления считывает состояние А2.
Если А2=1 переход М1, если А2=0, то старший разряд ШД положит. Процессор считывает данные с А1.
9 Лекция (10.10.2011)
Асинхронные последовательные интерфейсы
Особенность асинхронного обмена информацией состоит в том, что общая синхронизация между ПК и СД (средство диагностирования) отсутствует. На предающем и приемном конце имеются тактовые генераторы, которые настроены на одну и ту же частоту. Однако получить строго одинаковые частоты ГТИ не удается из-за влияния различных факторов. Поэтому надо рассматривать специальные меры для компенсации разбаланса частот.
9.1 Асинхронный последовательный контроллер передачи информации из пк в сд.
Блок-схема контроллера.
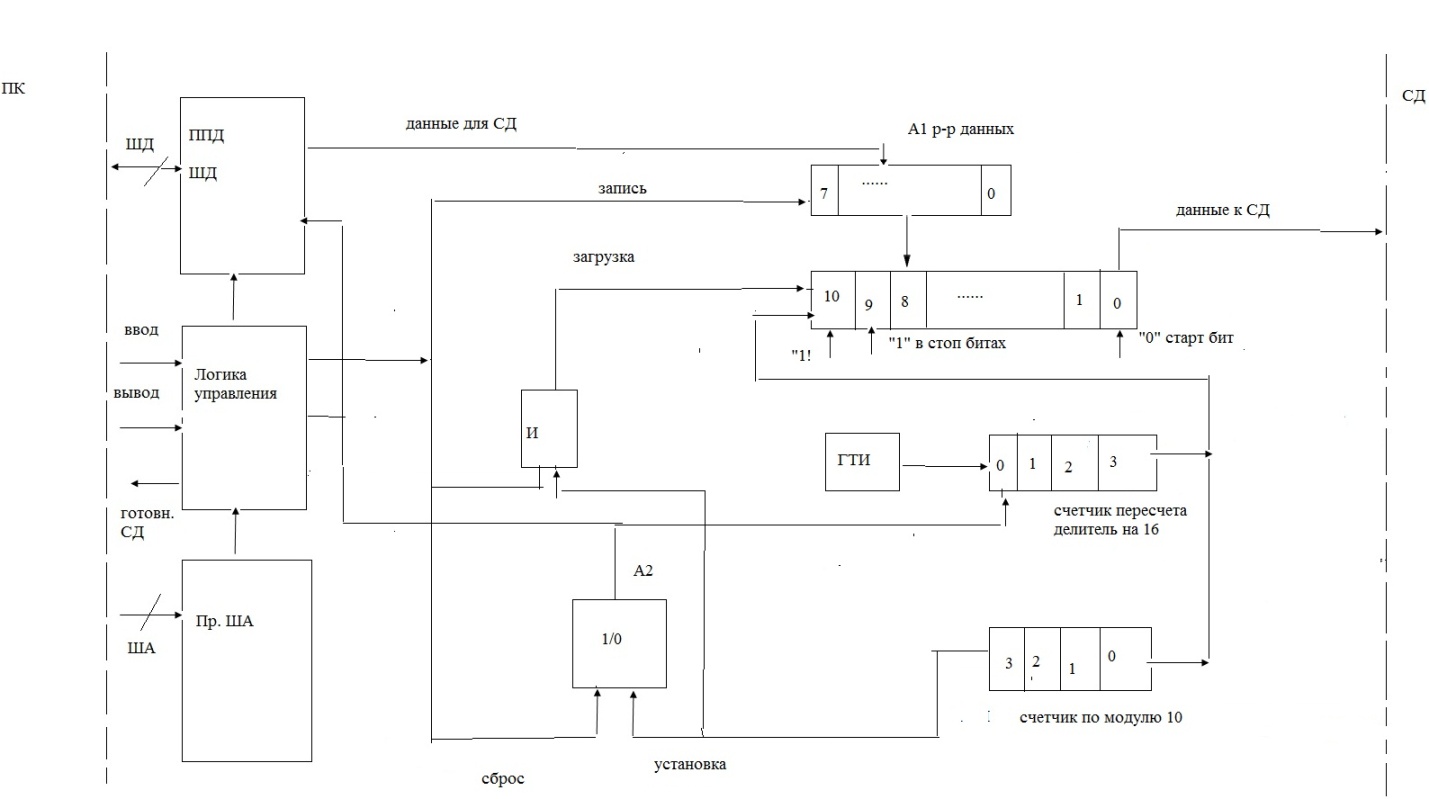
Назначение блоков:
Рассматриваемый генератор предназначен для передачи данных в формате с 2 стоп битами и 1 старт битом. Он включает Пр ША, ППД ШД и ЛУ. Буферный регистр А1, регистр состояния и управления А2 (триггер), ГТИ, делитель частоты на 16, счетчик по модулю 10, логическая схема «И».
Работа схемы:
После передачи очередного байта данных в А2 записывается «1» (установка-вход). Единица выходного сигнала счетчика по модулю 10 подготавливает схему «И». Наличие «1» в А2 информирует процессор о готовности контроллера к приему следующего байта данных и передачи его по линии связи к СД. Этот же сигнал «1» на А2 запрещает работу делителя на 16! Процесс передачи очередного байта начинается с того, что процессор выставляет на ШД очередной байт. Одновременно процессор формирует управляющий сигнал «вывод». ЛУ, получив сигнал «вывод» вырабатывает управляющий сигнал «запись» и по схеме «И» разрешает записываемый байт загрузить в сдвиговый регистр, тем самым байт из А1 переписывается в сдвиговый регистр. Этот же сигнал по входу «сброс» переводит А2 в 0.
Одновременно с «загрузкой» в сдвиговый регистр записывается в 0-разряд 0, а в 9,10 разряды -1. Наличие «0» на выходе А2 разрешает работу делителя частоты на 16. Делитель начинает накапливать импульс, поступающий в ГТИ. И в прием 16 импульса вырабатывает 1 сдвиговый импульс. Этот импульс выдает в линию данных стартовый бит. Значение старшего бита в линии данных поддерживается в линии данных до прихода очередного импульса сдвига. Этот импульс перепишет в 0-рязряд сдвигового регистра 1ый бит данных. Это продолжится до передачи всех информационных бит. После этого передаются 1ый и 2ой стоп биты. После счетчик по модулю 10 вырабатывает сигнал, который переводит А2 в 1 и подготавливает схему «И», т.е. контроллер переходит в режим ожидания. В линии поддерживается логическая «1». После этого процесс повторяется.
9.2 Контроллер последовательного асинхронного приема информации из сд в пк.
Блок-схема.
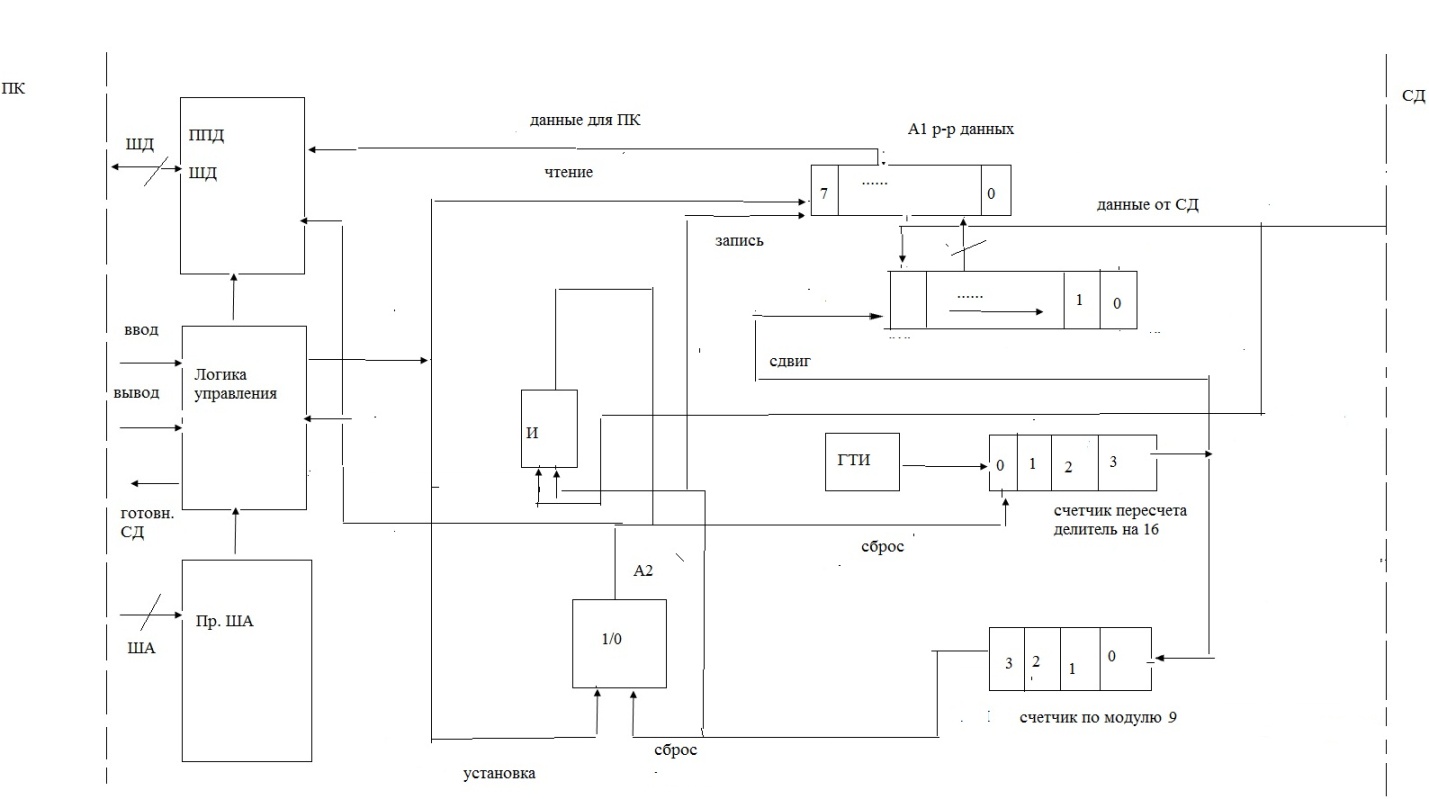
В отличие от предыдущей схемы на схему «И» на вход поступают данные от СД.
Работа схемы аналогична работе пред. схемы. Отличие: уровень логической «1», поступающие из линии «данные», запрещает работу делителя частоты на 16. После перехода счетчик по модулю 19 в единичное состояние. 1 со схемы «И» запрещает работу делителя на 16. Как только линия переходит в стартовый режим логического 0, схема «И»=0, запускает делитель частоты на 16. Сдвиговый регистр имеет 8 разрядов, вместо 10.
Особенность асинхронной передачи: ГТИ приемника и передатчика работают независимо. Частоты одинаковы. Для уменьшения вероятности ошибки из-за возможного различия частот вводится делитель частоты на 16, т.е. считывание производится примерно на середине временного интервала, отведенного на выработку 16 тактовых импульсов.
Асинхронный режим поддерживает микросхема UART, в современных системах интегрирована в чипсет.
Т10. Проектир. подс-м ввода аналог. инфы в СКС
10.1. анализ стр-р подс-мы ввода аналоговой инфы
10.2. х-ка сигналов от объекта диагностир.
10.3. анализ подс-мы аналог. ввода
10.1. стр-ра определяется целью и задачами диагностир. Цель-получ. достоверной инфы от объекта диагностир. Система в общ. случ. должна содержать:
1)датчик или группу датчиков первичной инфы, кот. находится на объекте диагностир.
2)блок преобразователей аналог. сигналов в цифровые
3) соотвествующий канал связи: цифовой и\или аналог.
4)наличие ср-ва обратного преобразования цифр.в аналог.
Сущ.различные вар-ты структурн.схем
1 вар-т реализ. принцип параллельной обраб. аналог. сигнала
Для каждого отдельного датчика существует свой АЦП, что обеспечивает максим. быстрод. и высокое кач-во.
Д1
СУ
СН
ФП
АЦП1
Дn
СУ
СН
ФП
АЦПn
УМ
К ПК
Д-датчик; СУ-согласующ. устр-во;
ФП-функциональный преобр-ль ЦМ-цифров. мультиплексор;
СН-схема нормализации
Существует ф-ла для определения кол-ва каналов в структурной сх. Это кол-во ограничивается динамической погрешностью преобразований i-го параметра.
Nц=
Nц-пред. Допустим. кол-во цифровых каналов
 -допустим.
значение динамич. погр-ти
-допустим.
значение динамич. погр-ти
 -максим.
значение производной параметра в
измерян. диапазоне преобразований
-максим.
значение производной параметра в
измерян. диапазоне преобразований
 -
период коммутации
-
период коммутации
Т.к.каналы независимы др.от друга, то относит. просто реализ-ся необходимые ф-циональные преобразования.
В дан. сх. отсутствуют ошибки, кот возникают в др. сх. при наличии одного АЦП и необх-ти введения сх. выборки хранения.
Др. вар-ты схем основаны на принципе последовательной обработки аналогов. сигналов(исп.аналоговый мультиплексор), а также необходимо наличие сх. выборки хранения.
2
вх
АМ
вх
АЦП
УУ
-ой вар-т сх.
К ПК
Существует ф-ла, кот. позволяет определить максим. допустимое кол-во датчиков.
Nа<= -период коммутации;
-период коммутации;
 -период
цикла
-период
цикла
В дан. сх. быстродействие сбора данных ниже, т.к. оно определяет АЦП, а применение аналог. мультиплексора и сх. выборки хранения ухудшает точностные характеристки.
Возможно построение структ. сх. с использованием 1 сх. выборки хранения
АМ
в\х
УУ
АЦП
К ПК
Е
АМ
СУ
УУ
в\х
АЦП
сли датчики однотипные и имеют одинак. сигналы, они могут быть поданы на вх. Аналог. мультиплексора
К ПК
Любой вар-т структурн.сх.реализ-ся из следующих осн. устр-в: датчиков, сх. согласования, сх. нормализации АЦП, цифров. или аналог. мультипл. или устр-ва управл.
10.2.
Входн. сигналы от объекта диагностики должны быть нормированы. В общем случае они могут быть аналоговыми или дискр.
Вх. сигн. от объекта диагностики
Аналогов.
Низк.ур.
Дискр.
Средний ур.
0-100мВ(термопара) -5-0+5мА 0-5В;-5В-0В
0-300Ом(датч. сопротивл.) -5-0+5В 0-12В;-12В-0В
0-5мГн(индуктив-ть) -10-0+10В 0-24В;-24-0В
0-48В;-48В-0В
0-бесконечность Ом(сухой контакт)
1
УСЗ
ПУ
ИД
АЦП
Д
У
Ф
К
 0.3.
0.3.
У-усилитель; Ф-фильтр, необходимый, чтобы убрать высокочастотную составляющ.
К-коммутатор(мультиплексор)
УСЗ-устр-во слежения запоминания(сх. выборки-хранения) при подаче на вход АЦП сигнала, он должен быть постоян. за весь период преобразования.
ИД-интерф. дискр. ввода и интерф. управления.
Существуют готовые модули, с помощью кот. реализ. ввод аналогов. сигн. в ПК.
1 из вар-тов имеет особ-ти:
Парам-р х-ки
1.число разр(ЦП) 11(вместе со зн.)
2.время преобраз. 100мкс
3.число рег-ров 3
4.Uвх.В +- 1В или +-10В
Данный модуль позволяет подключать 16 датчиков.
АМ
АМ
Д1
Д16
Д8
Д1
0
7
8
15