

1. Механические свойства вещества.
Лекция 1. Кинематика поступательного и вращательного движения материальной точки.
Механика – это раздел физики посвященный изучению движения твердых тел, жидкостей и газов. Целью изучения движения тел является получение ответа на вопросы: как двигаются тела и почему. Ответ на первый вопрос дает кинематика, а динамика выясняет причины и законы их движения.
Совокупность тел, выделенная для рассмотрения, называется механической системой.
Материальной точкой называется физическое тело, размерами которого можно пренебречь по сравнению с другими пространственными масштабами системы.
Абсолютно твердым телом называется тело, деформациями которого можно пренебречь в условиях данной задачи.
Поступательное движение материальной точки.
Поступательное движение – это такое движение, при котором любая прямая, связанная с движущимся телом, остается параллельной самой себе.
Материальную точку можно представить в виде математической точки, в которой сосредоточена масса тела. Существуют два способа геометрического описания движения материальной точки.
В первом способе положение материальной
точки задается с помощью радиус-вектора
![]() ,
который является функцией времени. Он
определяет положение точки M
относительно некоторой точки O,
являющейся началом координат. Во втором
способе положение материальной точки
задается с помощью траектории, по которой
движется точка и уравнением ее движения
по этой траектории. В соответствии с
этими двумя способами определения
положения точки существуют два способа
описания ее движения.
,
который является функцией времени. Он
определяет положение точки M
относительно некоторой точки O,
являющейся началом координат. Во втором
способе положение материальной точки
задается с помощью траектории, по которой
движется точка и уравнением ее движения
по этой траектории. В соответствии с
этими двумя способами определения
положения точки существуют два способа
описания ее движения.
В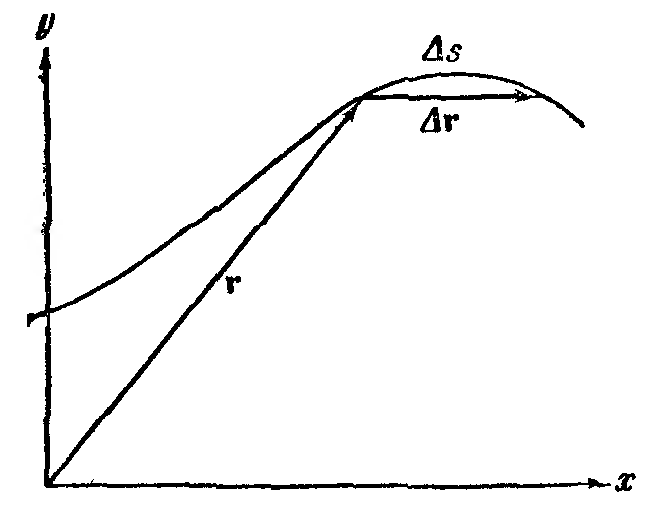 прямоугольной системе координат вектор
можно представить в виде:
прямоугольной системе координат вектор
можно представить в виде:
![]() Здесь обозначены
Здесь обозначены
![]() - единичные орты осей координат. Функции
- единичные орты осей координат. Функции
![]() определяют параметрическое уравнение
траектории. Параметром в уравнениях
является время. Исключая его из уравнений,
получаем равенство
определяют параметрическое уравнение
траектории. Параметром в уравнениях
является время. Исключая его из уравнений,
получаем равенство
![]() ,
которое представляет собой уравнение
траектории движения материальной точки.
,
которое представляет собой уравнение
траектории движения материальной точки.
Рассмотрим положение точки в два
последовательных момента времени
![]() и
и
![]() .
Скоростью движения материальной точки
называется предел приращения ее
радиус-вектора за интервал времени
.
Скоростью движения материальной точки
называется предел приращения ее
радиус-вектора за интервал времени
![]() :
:
![]()
Скорость является векторной величиной. Ее направление в любой точке траектории определяется направлением касательной в этой точке. Аналогично, ускорением движущейся точки называется предел:
![]()
Ускорение является также векторной
величиной. Вектор ускорения расположен
в плоскости, определяемой векторами
![]() ,
и направлен внутрь вогнутости кривой.
Дифференцируя выражение радиус-вектора
через координатные составляющие, находим
скорость:
,
и направлен внутрь вогнутости кривой.
Дифференцируя выражение радиус-вектора
через координатные составляющие, находим
скорость:
![]() .
.
Ускорение определяется второй производной по времени от радиус-вектора материальной точки:
![]() .
.
Проекция вектора скорости на координатную ось равна производной по времени соответствующей координаты движущейся частицы.
Движение материальной точки вдоль оси х.
Кинематическое
уравнение такого движения задается
уравнением
![]() ,
где
f(t)-
некоторая
функция времени. Среднее
значение модуля скорости за время
равно
,
где
f(t)-
некоторая
функция времени. Среднее
значение модуля скорости за время
равно
![]() .
Определим путь
.
Определим путь
![]() ,
проходимый точкой с момента времени
,
проходимый точкой с момента времени
![]() до
момента
до
момента
![]() .
Разобьем промежуток времени
.
Разобьем промежуток времени
![]() на
количество
на
количество![]() малых
промежутков
малых
промежутков
![]() .
Весь путь представим в виде суммы путей:
.
Весь путь представим в виде суммы путей:
![]() .
.
Пусть
![]() в
отличие от разности координат
в
отличие от разности координат![]() не
может убывать и принимать отрицательные
значения,
т. е.
не
может убывать и принимать отрицательные
значения,
т. е.
![]() .
Каждое из слагаемых может быть представлено
в виде
.
Каждое из слагаемых может быть представлено
в виде
![]() .
Следовательно
.
Следовательно
![]() .
При стремлении всех
.
При стремлении всех
![]() к
нулю получим:
к
нулю получим:
 .
.
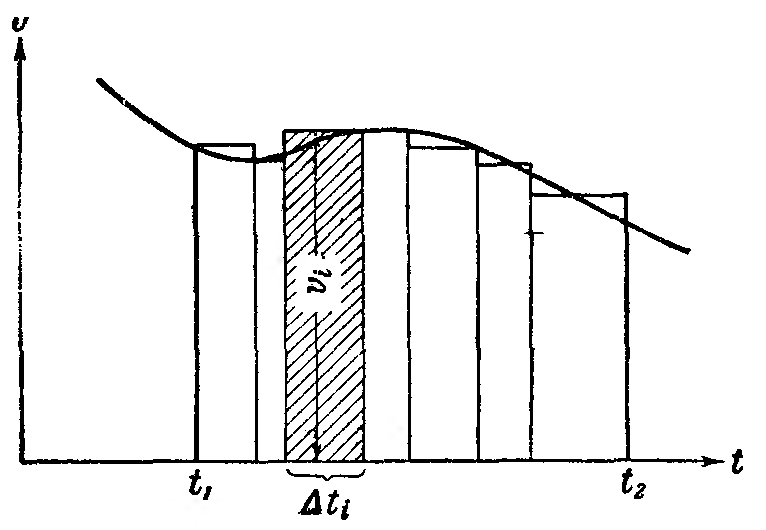
На
графике зависимости
![]() от
времени
пройденный
путь можно представить как площадь
фигуры, ограниченной кривой
от
времени
пройденный
путь можно представить как площадь
фигуры, ограниченной кривой
![]() и
прямыми
и
прямыми
![]() и
и
![]() .
.
Среднее значение модуля скорости за промежуток времени равно:
![]() .
.
Подставляя выражение для пройденного пути, получим:

Вращательное движение материальной точки.
Вращательным движением называется такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Рассмотрим криволинейный отрезок траектории движущейся точки для двух последовательных моментов времени и . Путь, пройденный материальной точкой за это время, обозначим . Модулем скорости движущейся материальной точки называется выражение:
![]() .
.
Эта модуль вектора скорости
![]() ,
которая была определена выше. Направление
скорости определяется касательной к
траектории в конце криволинейного
отрезка
.
Если обозначить единичный вектор
касательной к траектории
,
которая была определена выше. Направление
скорости определяется касательной к
траектории в конце криволинейного
отрезка
.
Если обозначить единичный вектор
касательной к траектории
![]() ,
то вектор скорости можно записать так:
,
то вектор скорости можно записать так:
![]() .
.
Пусть
![]() определяет зависимость пути от времени
для тела движущегося по некоторой
траектории. Если вектор скорости
определен в каждой точке кривой, то мы
можем построить в некоторой произвольной
точке векторы, равные векторам скорости.
Кривая, проведенная через концы всех
векторов, называется годографом движения
определяет зависимость пути от времени
для тела движущегося по некоторой
траектории. Если вектор скорости
определен в каждой точке кривой, то мы
можем построить в некоторой произвольной
точке векторы, равные векторам скорости.
Кривая, проведенная через концы всех
векторов, называется годографом движения
![]() .
Ускорение, которое п
.
Ускорение, которое п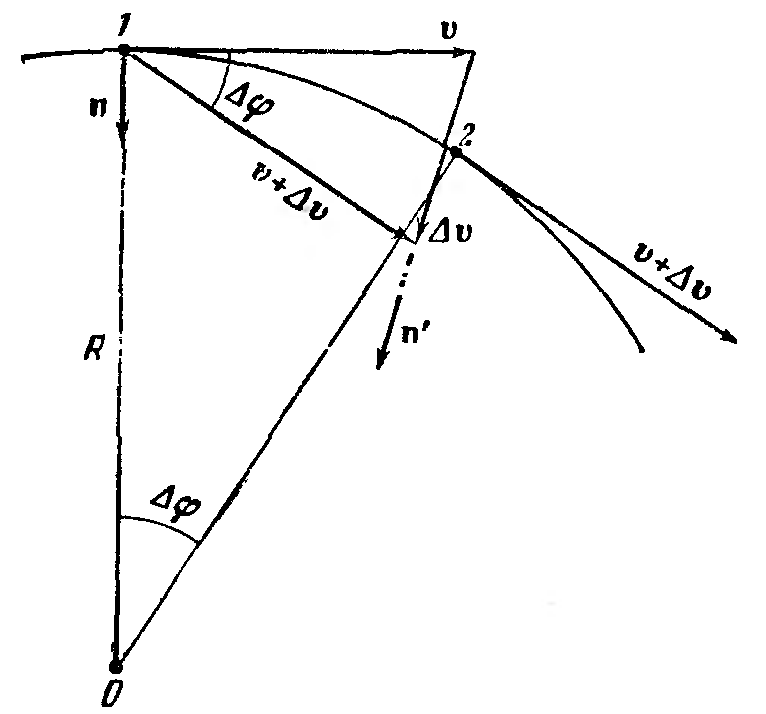 оказывает
быстроту изменения скорости, имеет тоже
направление, что и касательная к
годографу. Вектор ускорения направлен
внутрь кривизны траектории. Для описания
движения материальной точки воспользуемся
подвижной системой координат, которая
перемещается с точкой по траектории.
Векторы
оказывает
быстроту изменения скорости, имеет тоже
направление, что и касательная к
годографу. Вектор ускорения направлен
внутрь кривизны траектории. Для описания
движения материальной точки воспользуемся
подвижной системой координат, которая
перемещается с точкой по траектории.
Векторы
![]() расположены
в плоскости
расположены
в плоскости
![]() .
Пусть единичный вектор
направлен вдоль касательной к траектории
движения, а единичный вектор
.
Пусть единичный вектор
направлен вдоль касательной к траектории
движения, а единичный вектор
![]() направлен вдоль главной ее нормали.
Проекции векторов
на
оси этой системы координат равны:
направлен вдоль главной ее нормали.
Проекции векторов
на
оси этой системы координат равны:
![]() .
.
Ускорения
![]() называются соответственно тангенциальным
и нормальным. Выразим эти ускорения
через параметры кривой и закон движения:
называются соответственно тангенциальным
и нормальным. Выразим эти ускорения
через параметры кривой и закон движения:
![]() .
.
Следовательно, вектор ускорения можно представить в виде суммы двух векторов:
![]() ,
,
где
![]() - касательное ускорение,
- касательное ускорение,
![]() -
нормальное ускорение. Скорость
изменения направления касательной к
траектории
-
нормальное ускорение. Скорость
изменения направления касательной к
траектории
![]() определяется
искривлением траектории. Степень
искривленности плоской кривой определяется
кривизной
определяется
искривлением траектории. Степень
искривленности плоской кривой определяется
кривизной
![]() траектории:
траектории:
![]() ,
,
где![]() -
угол между касательными к кривой в
точках, отстоящих друг от друга на
отрезок
.
Радиусом кривизны
-
угол между касательными к кривой в
точках, отстоящих друг от друга на
отрезок
.
Радиусом кривизны
![]() в
данной точке кривой называется величина
обратная кривизне:
в
данной точке кривой называется величина
обратная кривизне:
![]() .
.
Следовательно,
![]() .
.
Вектор нормального ускорения равен:
![]() .
.
Вектор ускорения частицы движущейся по плоской кривой определяется выражением:
![]() .
.
Модуль вектора равен:
Движение по окружности.
Кинематическое уравнение движения материальной точки по окружности радиуса :
![]() .
.
Модуль угловой скорости определяется выражением:
![]() .
.
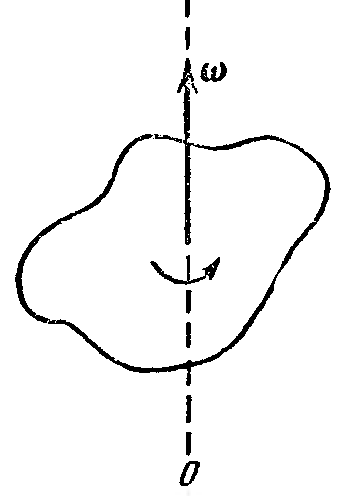
Вектор угловой скорости направлен вдоль оси, вокруг которой вращается тело, в направление вращения правого винта.
Р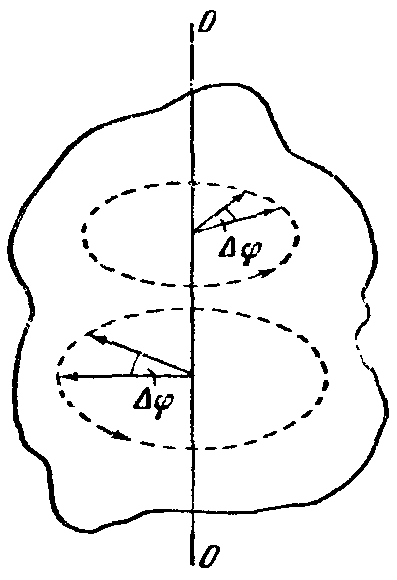 авномерное
вращение характеризуется периодом
авномерное
вращение характеризуется периодом
![]() .
Период это время, за которое точка
совершает один оборот на угол
.
Период это время, за которое точка
совершает один оборот на угол
![]() .
Следовательно,
.
Следовательно,
![]()
 .
.
Из этого выражения получаем:
![]() .
.
Частотой
![]() называется
число оборотов в единицу времени:
называется
число оборотов в единицу времени:
![]() .
.
Следовательно, угловая скорость равна числу оборотов умноженному на :
![]() .
.
Модуль углового ускорения определяется выражением:
![]() .
.
Найдем
связь между модулями линейных и угловых
величин, характеризующих
движение точки по окружности. Величина
скорости
определяется
угловой скоростью вращения точки![]() и
расстоянием
точки
от оси вращения. Пусть за малый промежуток
времени
тело
повернулось на угол
.
Точка на расстоянии
от
оси прошла путь
и
расстоянием
точки
от оси вращения. Пусть за малый промежуток
времени
тело
повернулось на угол
.
Точка на расстоянии
от
оси прошла путь
![]() .
Линейная скорость точки равна:
.
Линейная скорость точки равна:
![]() .
.
Следовательно, связь между линейными и угловыми величинами определяется выражениями:
![]() ,
,
Модуль полного ускорения равен:
![]() .
.
Приведем аналогию между кинематическими характеристиками поступательного и вращательного движений:
|
Поступательное движение |
|
Вращательное движение |
Линейная координата |
|
Угловая координата |
|
Скорость |
|
Угловая скорость |
|
Ускорение |
|
Угловое ускорение |
|
Лекция 2. Динамика поступательного движения материальной точки.
Первый закон Ньютона.
Всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, пока воздействие со стороны других тел не заставит его изменить это состояние.
Система отчета, в которой выполняется этот закон, называется инерциальной.
Масса – количественная характеристика инертности тел.
Импульс
материальной точки массой т,
движущейся
со
скоростью![]() :
:
![]() .
.
Второй закон Ньютона.
Скорость изменения импульса материальной точки тела равна действующей на нее силе.
![]() ,
,
где
![]() -
результирующая сила, действующая
на материальную точку.
-
результирующая сила, действующая
на материальную точку.
Другая формулировка.
Произведение массы тела на его ускорение равно действующей на тело силе.
![]()
Масса тела определяется коэффициентом пропорциональности в линейной зависимости ускорения материальной точки от приложенной к ней силе, под действием которой точка двигается с ускорением.
Сила измеряется в системе единиц СИ в Ньютонах (Н), а в системе единиц СГС динах (дин).
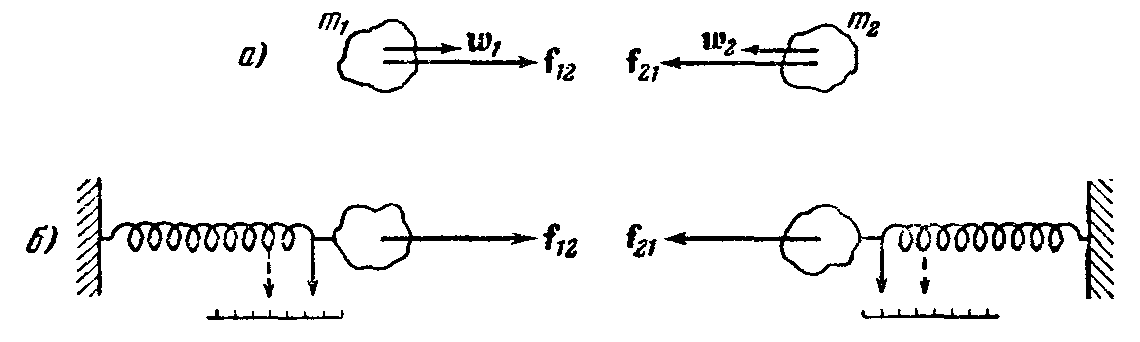
Третий закон Ньютона.
Силы, с которыми действуют друг на друга взаимодействующие тела, равны по величине и противоположны по направлению.
![]()
Принцип относительности Галилея.
С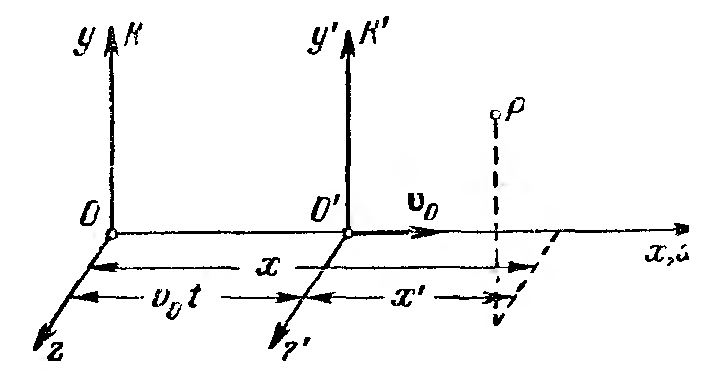 истема
истема![]() двигается
со скоростью
двигается
со скоростью
![]() относительно покоящейся системы
относительно покоящейся системы
![]() .
Преобразования Галилея при движении
вдоль оси x.
.
Преобразования Галилея при движении
вдоль оси x.
![]()
Оно эквивалентно равенству:
![]()
Уравнения динамики не изменяются при переходе от одной инерциальной системы отчета к другой.
Силы, рассматриваемые в механике:
а) сила упругости
![]() ,
,
где k – коэффициент упругости (в случае пружины – жесткость); х – абсолютная деформация;
б) сила тяжести
![]() ;
;
в) сила трения (скольжения)
![]() ,
,
где f - коэффициент трения; N - сила нормального давления.
г) сила гравитационного взаимодействия
![]() ,
,
где
![]() - гравитационная постоянная;
- гравитационная постоянная;
![]() - массы взаимодействующих
тел;
- массы взаимодействующих
тел;
![]() - расстояние между телами (тела
рассматриваются как материальные
точки).
- расстояние между телами (тела
рассматриваются как материальные
точки).
Закон всемирного тяготения.
Закон всемирного тяготения Ньютона - Сила, с которой две материальные точки притягивают друг друга, пропорциональна массам этих точек и обратно пропорциональна квадрату расстояния между ними.
В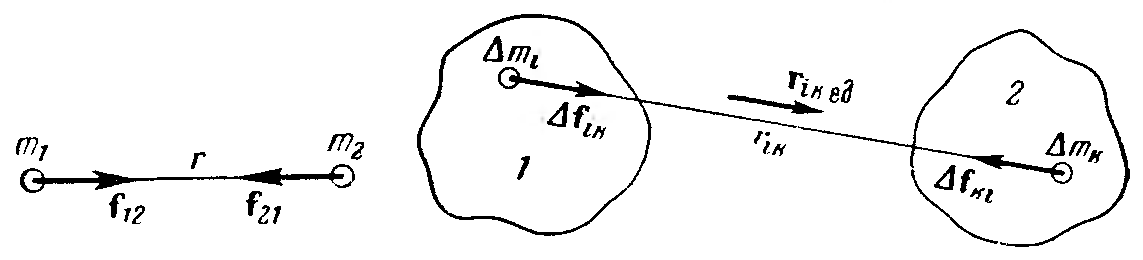 векторном виде:
векторном виде:
![]() .
.
Для
определения силы взаимодействия
протяженных тел их надо разбить на
элементарные массы
![]() .
Сила, с которой тело 2 действует на тело
1:
.
Сила, с которой тело 2 действует на тело
1:
![]() .
.
Размерность
гравитационной постоянной:
 .
.
Два
тела массой 100 кг на расстоянии 1м
взаимодействуют с силой порядка
![]() Н.
Н.
Измерения
Кавендиша
методом крутильных весов позволили
получить значение
![]() .
.
В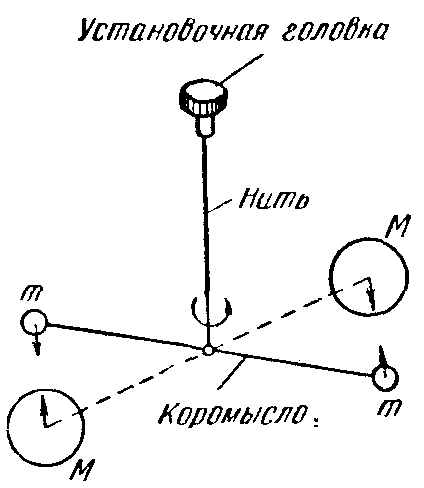 сякое
тело массы
сякое
тело массы
![]() изменяет
свойства окружающего его пространства
– создает в нем гравитационное поле.
Помещенное в него другое тело оказывается
под действием силы. Величину
изменяет
свойства окружающего его пространства
– создает в нем гравитационное поле.
Помещенное в него другое тело оказывается
под действием силы. Величину
![]() называют
напряженностью
гравитационного поля.
Она имеет размерность ускорения.
Напряженность гравитационного поля
материальной точки массы
равна
называют
напряженностью
гравитационного поля.
Она имеет размерность ускорения.
Напряженность гравитационного поля
материальной точки массы
равна
![]() .
Потенциальная энергия точки массой
.
Потенциальная энергия точки массой
![]() в этом поле равна
в этом поле равна
![]() .
Величина
.
Величина
![]() называют
потенциалом
гравитационного поля.
Работа, совершаемая над частицей
силами
поля при перемещении ее из точки 1 в
точку 2 равна
называют
потенциалом
гравитационного поля.
Работа, совершаемая над частицей
силами
поля при перемещении ее из точки 1 в
точку 2 равна
![]()
Принцип
эквивалентности. Массы фигурируют в
двух законах и характеризуют инертные
![]() и
гравитационные
и
гравитационные
![]() свойства.
Проведенные эксперименты показали их
эквивалентность.
свойства.
Проведенные эксперименты показали их
эквивалентность.
На
поверхности Земли
![]() .
Под действием этой силы тело приобретает
ускорение:
.
Под действием этой силы тело приобретает
ускорение:
![]() .
Получено:
.
Получено:
![]() .
Соотношение
.
Соотношение
![]() позволяет найти массу Земли, измеряя
ускорение на ее поверхности и ее радиус.
Получено значение
позволяет найти массу Земли, измеряя
ускорение на ее поверхности и ее радиус.
Получено значение
![]() .
Зная радиус земной орбиты
.
Зная радиус земной орбиты
![]() и
время полного обращения Земли вокруг
Солнца
,
можно найти массу Солнца
и
время полного обращения Земли вокруг
Солнца
,
можно найти массу Солнца
![]() из
условия равенства центростремительной
силы
из
условия равенства центростремительной
силы
![]() и
силы гравитационного взаимодействия:
и
силы гравитационного взаимодействия:
![]()
Первая
космическая скорость
![]() определяется
из условия равенства центростремительной
силы и силы тяжести:
определяется
из условия равенства центростремительной
силы и силы тяжести:
![]() .
.
![]()
В торая
космическая скорость
торая
космическая скорость
![]() определяется
из равенства работы по удалению тела с
поверхности Земли кинетической энергии,
сообщенной телу. Элементарная работа
на пути
определяется
из равенства работы по удалению тела с
поверхности Земли кинетической энергии,
сообщенной телу. Элементарная работа
на пути
![]() равна:
равна:
![]()
Работа
на пути от
![]() до
до
![]() находим
интегрированием:
находим
интегрированием:
Сила
тяжести равна силе гравитационного
притяжения
![]() .
Получаем:
.
Получаем:
![]() .
Вторая космическая скорость определяется
выражением:
.
Вторая космическая скорость определяется
выражением:
![]() .
.
Лекция 3. Элементы статики и динамики вращательного движения твердого тела.
При
поступательном движении все точки тела
получают равные перемещения за один и
тот же промежуток времени. При
вращательном движении все точки твердого
тела движутся по окружностям около оси
вращения.
Любое движение твердого тела может быть
представлено к ак
наложение этих двух видов движения.
Сложное движение рассматриваем в
неподвижной системе отсчета. Движение
тела можно представить как вращение с
угловой скоростью
в
движущейся системе отсчета. Эта системе
отсчета движется поступательно
относительно неподвижной системы со
скоростью v0
. Линейная скорость v`
точки с радиус-вектором r
, обусловленная вращением твердого
тела, равна v`
=
r.
Следовательно, скорость сложного
движения этой точки в неподвижной
системе координат имеет вид:
ак
наложение этих двух видов движения.
Сложное движение рассматриваем в
неподвижной системе отсчета. Движение
тела можно представить как вращение с
угловой скоростью
в
движущейся системе отсчета. Эта системе
отсчета движется поступательно
относительно неподвижной системы со
скоростью v0
. Линейная скорость v`
точки с радиус-вектором r
, обусловленная вращением твердого
тела, равна v`
=
r.
Следовательно, скорость сложного
движения этой точки в неподвижной
системе координат имеет вид:
v = v0 + r.
Элементарное перемещение твердого тела при плоском движении всегда можно представить как поворот вокруг некоторой оси, называемой мгновенной осью вращения.
Движение центра масс твердого тела.
Представим тело, как систему материальных
точек, массой
![]() взаимное
расположение которых остается неизменным.
На каждую из них действуют как внутренние
взаимное
расположение которых остается неизменным.
На каждую из них действуют как внутренние
![]() ,
так и внешние
,
так и внешние
![]() силы.
Для каждой элементарной массы запишем
второй закон Ньютона:
силы.
Для каждой элементарной массы запишем
второй закон Ньютона:
![]() .
.
Сложив уравнения для всех элементарных масс, получим:
![]() .
.
Так как сумма всех внутренних сил равна
нулю
![]() ,
то равенство упрощается:
,
то равенство упрощается:
![]() .
.
Воспользовавшись определением
радиус-вектора центра масс
![]() и
продифференцировав это равенство
и
продифференцировав это равенство
![]() ,
получим:
,
получим:
![]() .
.
Центр масс твердого тела движется так, как двигалась бы материальная точка с массой, равной массе тела, под действием всех приложенных сил.
Вращение тела вокруг неподвижной оси.
Р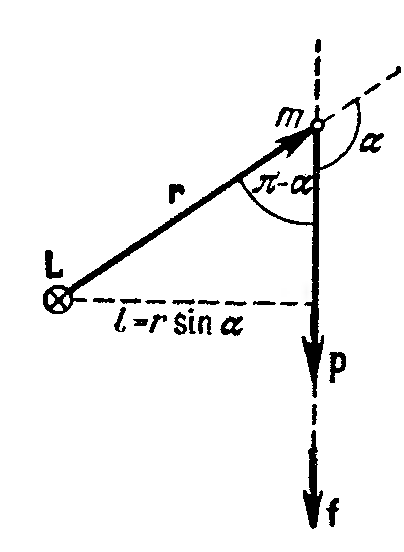 ассмотрим
две взаимодействующие частицы с силами
ассмотрим
две взаимодействующие частицы с силами
![]() ,
на которые действуют внешние силы
,
на которые действуют внешние силы
![]() :
:
![]() .
.
Слева умножаем равенство векторно на
![]() :
:
![]()
Левые части равенства можно записать
в виде:
![]() ,
,
Где обозначено
![]() –
момент импульса относительно точки
О.
–
момент импульса относительно точки
О.
Момент импульса системы относительно
точки О называется векторная сумма
моментов импульсов частиц, входящих в
систему
![]() .
.
Моментом импульса частицы относительно
оси называется проекция вектора на эту
ось
![]() .
.
Модуль вектора момента импульса частицы
равен
![]() ,
где
,
где
![]() - плечо импульса относительно точки О.
- плечо импульса относительно точки О.
Момент силы относительно точки О
равен:
![]() .
.
М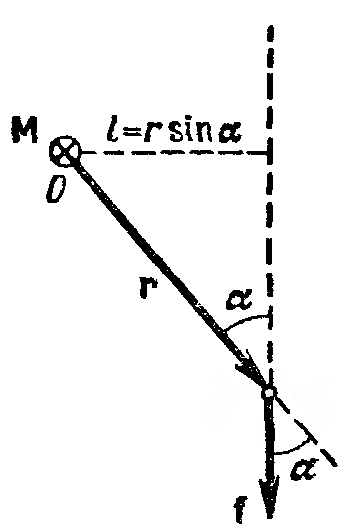 одуль
момента силы равен
одуль
момента силы равен
![]() ,
где
- плечо силы относительно точки О.
,
где
- плечо силы относительно точки О.
Из уравнения движения имеем:
![]()
Складывая, получим:
![]() .
Обозначим полный момент импульса
.
Обозначим полный момент импульса
![]() ,
полный момент внешних сил
,
полный момент внешних сил
![]() .
Так как полный момент внутренних сил
равен нулю
.
Так как полный момент внутренних сил
равен нулю
![]() ,
получим:
,
получим:
![]()
Производная по времени от момента импульса системы относительно оси равна сумме моментов внешних сил относительно этой оси.
Абсолютно твердое тело можно рассматривать как систему материальных точек с неизменным расстоянием между ними. Момент импульса и внешних сил относительно оси вращения этой системы равен:
![]()
Модуль момента импульса равен:
![]() ,
где
,
где
![]() - расстояние частицы от оси вращения.
Проекция момента импульса на ось
- расстояние частицы от оси вращения.
Проекция момента импульса на ось![]() равна:
равна:
![]()
Просуммируем по всем частицам, получим:
![]()
Величина
![]() равная
сумме произведений элементарных масс
на квадраты их расстояния от некоторой
оси, называется моментом инерции тела
относительно данной оси.
равная
сумме произведений элементарных масс
на квадраты их расстояния от некоторой
оси, называется моментом инерции тела
относительно данной оси.
![]() .
.
Принимая во внимание, что
![]() ,
получим основное
уравнение динамики вращательного
движения
относительно неподвижной оси
,
получим основное
уравнение динамики вращательного
движения
относительно неподвижной оси
![]() ,
,
где
![]() -
результирующий момент внешних сил
относительно
оси
,
действующих на тело;
-
результирующий момент внешних сил
относительно
оси
,
действующих на тело;
![]() - угловое ускорение;
- угловое ускорение;
![]() - момент инерции относительно оси
вращения. Моменты
инерции некоторых тел массой
относительно
оси
,
проходящей через центр масс:
- момент инерции относительно оси
вращения. Моменты
инерции некоторых тел массой
относительно
оси
,
проходящей через центр масс:
а) стержня
длиной
![]() относительно оси, перпендикулярной
стержню,
относительно оси, перпендикулярной
стержню,
![]() ;
;
б) обруча (тонкостенного цилиндра) относительно оси, перпендикулярной плоскости обруча (совпадающей с осью цилиндра),
![]() ,
,
где R- радиус обруча (цилиндра);
в) диска радиусом R относительно оси, перпендикулярной плоскости диска,
![]() .
.
Проекция на ось момента импульса тела, вращающегося относительно неподвижной оси ,
![]() ,
,
где - угловая скорость тела.
Закон сохранения момента импульса системы тел, вращающихся вокруг неподвижной оси ,
![]() ,
,
где - момент инерции системы тел относительно оси ; - угловая скорость вращения тел системы вокруг оси .
Каждое тело обладает определенным моментом инерции относительно любой оси, подобно тому, как тело обладает массой. Момент инерции тела, относительно какой либо оси вращения, можно определить как обратный коэффициент пропорциональности в линейной зависимости углового ускорения тела, вращающегося вокруг неподвижной оси, и момента внешних сил относительно этой оси, под действием которых вращается тело.
Для тела с неравномерно распределенной массой плотность его определяется выражением:
![]() .
.
Элементарная масса равна произведению плотности тела в данной точке на соответствующий элементарный объем:
![]() .
.
Следовательно, момент инерции можно представить в виде:
![]() .
.
Это выражение позволяет вычислять моменты инерции тел различной формы.
Теорема
Штейнера.
Момент
инерции
![]() относительно
произвольной оси равен сумме момента
инерции
относительно
произвольной оси равен сумме момента
инерции
![]() относительно оси, параллельной данной
и проходящей через центр масс тела, и
произведения массы тела
на квадрат расстояния
относительно оси, параллельной данной
и проходящей через центр масс тела, и
произведения массы тела
на квадрат расстояния
![]() между осями:
между осями:
![]() .
.
Приведем аналогию между динамическими характеристиками поступательного и вращательного движений:
|
Поступательное движение |
|
Вращательное движение |
Масса |
|
Момент инерции |
|
Сила |
|
Момент силы |
|
Импульс |
|
Момент импульса |
|
Закон Ньютона |
|
Закон динамики вращательного движения |
|

Лекция 4. Законы сохранения в механике. Кинетическая и потенциальная энергия.
Силы, действующие на тела системы, можно подразделить на силы внутренние и внешние. В основе сохранения энергии лежит однородность времени, равнозначность всех моментов времени. В основе сохранения импульса лежит однородность пространства.
Согласно
второму закону Ньютона, производная по
времени от суммарного импульса
механической системы равна результирующей
внешних сил, действующих на эту систему
![]() .
Если на систему не действуют внешние
силы, то
.
Если на систему не действуют внешние
силы, то
![]() .
Следовательно, в замкнутой системе
выполняется закон
сохранения импульса.
.
Следовательно, в замкнутой системе
выполняется закон
сохранения импульса.
Суммарный импульс замкнутой системы материальных точек остается постоянным.
![]() ,
,
или для
двух тел (![]() )
)
![]() ,
,
где
![]() -
скорости тел в начальный момент времени;
-
скорости тел в начальный момент времени;
![]() -
скорости тех же тел в конечный момент
времени.
-
скорости тех же тел в конечный момент
времени.
Согласно
основному закону динамики вращательного
движения, производная
по времени от суммарного момента импульса
механической системы равна моменту
результирующей внешних сил, действующих
на эту систему
.
При отсутствии внешних сил
![]() .
Следовательно, в замкнутой системе
выполняется закон сохранения момента
импульса.
.
Следовательно, в замкнутой системе
выполняется закон сохранения момента
импульса.
Момент импульса замкнутой системы материальных точек остается постоянным.
![]() .
.
Для двух
тел, составляющих замкнутую систему и
вращающихся относительно неподвижной
оси вращения, имеем
![]() .
В формуле обозначено:
.
В формуле обозначено:
![]() -
моменты инерции и угловые частоты
соответственно первого и второго тела
в начальный момент времени. Величины
со штрихами обозначают их значения в
конечный момент времени.
-
моменты инерции и угловые частоты
соответственно первого и второго тела
в начальный момент времени. Величины
со штрихами обозначают их значения в
конечный момент времени.
Воспользовавшись
вторым законом Ньютона для поступательного
движения
![]() и умножив это уравнение на перемещение
и умножив это уравнение на перемещение
![]() ,
получим:
,
получим:
![]() .
.
Отсюда: .
Величина
.
Величина
![]() называется
кинетической энергией тела.
называется
кинетической энергией тела.
Кинетическая энергия тела, вращающегося вокруг неподвижной оси ,
![]()
![]() или
или
![]()
Величина
![]() называется
работой силы
на
пути
называется
работой силы
на
пути
![]() .
Проинтегрировав, получим, что работа
.
Проинтегрировав, получим, что работа
![]() ,
совершаемая
результирующей силой, определяется
как мера изменения кинетической энергии
материальной
точки:
,
совершаемая
результирующей силой, определяется
как мера изменения кинетической энергии
материальной
точки:
![]() .
.
Работа результирующей всех сил, действующих на частицу, идет на приращение кинетической энергии частицы.
К инетическая
энергия тела, движущегося
поступательно,
инетическая
энергия тела, движущегося
поступательно,
![]() или
или
![]() .
.
Работа
![]() .
Острый угол
.
Острый угол
![]() работа
положительна. Тупой угол
работа
положительна. Тупой угол
![]() работа
отрицательна. Если
работа
отрицательна. Если
![]() работа
равна нулю. Перемещение груза на
горизонтальной плоскости. Работа
численно равна площади фигуры на графике
функции
работа
равна нулю. Перемещение груза на
горизонтальной плоскости. Работа
численно равна площади фигуры на графике
функции
![]() ,
ограниченной графиком
,
ограниченной графиком![]() и осью
.
и осью
.
Например, для упругой силы работа определяется площадью треугольника
![]() .
.
Работа результирующей нескольких сил равна алгебраической сумме работ, совершаемых каждой из сил в отдельности.
![]()
Т ак
как
,
то
ак
как
,
то
![]()
Работа, совершаемая в единицу времени, называется мощностью.
![]()
Если частица в каждой точке пространства подвержена воздействию других тел, то эта частица находится в поле сил.
Поле
сил
![]() называется центральным. Если
называется центральным. Если
![]() поле однородно. Если сила не зависит от
времени, то поле стационарно.
поле однородно. Если сила не зависит от
времени, то поле стационарно.
Если работа, совершаемая над частицей силами поля, зависит лишь от начального и конечного положения частицы, и не зависит от пути, по которому двигалась частица, то такие силы называются консервативными.
Работа консервативных сил на замкнутом пути равна нулю.
С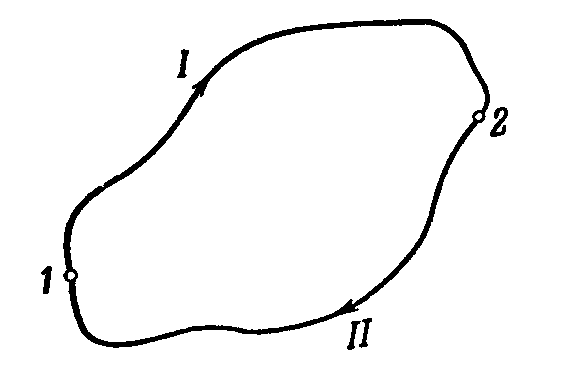 илы,
действующие в стационарном однородном
поле консервативны.
илы,
действующие в стационарном однородном
поле консервативны.
Силы, действующие в центральном поле консервативны.
Система СИ. Единица работы и мощности:
![]()
Консервативные силы являются частным случаем потенциального силового поля.
Поле
сил называется потенциальным, если его
можно описать с помощью функции
![]() ,
градиент которой определяет силу в
каждой точке поля
,
градиент которой определяет силу в
каждой точке поля
![]() .
.
Функция называется потенциальной функцией или потенциалом.
В случае,
когда потенциал не зависит явно от
времени, потенциальное поле оказывается
стационарным, а его силы – консервативными.
В этом случае
![]() ,
где
,
где
![]() - потенциальная энергия частицы. Для
нестационарного силового поля
силы не являются консервативными.
- потенциальная энергия частицы. Для
нестационарного силового поля
силы не являются консервативными.
Если
работа сил не зависит от пути, то каждой
точке поля можно сопоставить значение
некоторой функции
такой,
что разность значений этой функции
будет определять работу сил:
![]() .
Пусть на частицу действуют только
консервативные силы. Тогда работа,
совершаемая над частицей на пути 1 – 2,
может быть представлена в виде
.
Эта работа идет на приращение кинетической
энергии частицы. Приходим к равенству:
.
Пусть на частицу действуют только
консервативные силы. Тогда работа,
совершаемая над частицей на пути 1 – 2,
может быть представлена в виде
.
Эта работа идет на приращение кинетической
энергии частицы. Приходим к равенству:
![]() .
Из него следует, что:
.
Из него следует, что:
![]()
Величина
![]() для
частицы, находящейся в поле консервативных
сил, остается постоянной.
для
частицы, находящейся в поле консервативных
сил, остается постоянной.
Функция называется потенциальной энергией во внешнем поле сил.
Величина
![]() ,
равная сумме кинетической и потенциальной
энергий, называется полной механической
энергией частицы.
,
равная сумме кинетической и потенциальной
энергий, называется полной механической
энергией частицы.
Сила,
перемещая частицу вдоль оси
на
величину
![]() ,
совершает на ней работу
,
совершает на ней работу![]() .
Работа есть убыль потенциальной энергии
.
Работа есть убыль потенциальной энергии
![]() .
Получаем
.
Получаем
![]() .
Отсюда:
.
Отсюда:
![]() .
.
![]()
Закон сохранения механической энергии.
Полная механическая энергия системы невзаимодействующих частиц, на которые действуют только консервативные силы, остается постоянной.
![]()
Потенциальная энергия:
а) упругодеформированной пружины
![]() ,
,
где k – жесткость пружины; х – абсолютная деформация;
б) гравитационного взаимодействия
![]() ,
,
где
- гравитационная
постоянная;
![]() -
массы взаимодействующих
тел;
-
расстояние между ними (тела
рассматриваются как материальные
точки);
-
массы взаимодействующих
тел;
-
расстояние между ними (тела
рассматриваются как материальные
точки);
в) тела, находящегося в однородном поле силы тяжести,
![]() ,
,
где g
–
ускорение свободного падения; h
– высота
тела над
уровнем, принятым за нулевой (формула
справедлива
при условии
![]() ,
где R
– радиус
Земли).
,
где R
– радиус
Земли).
Закон сохранения механической энергии
![]() .
.
Лекция 5. Механические колебания и волны.
Механическими колебаниями называются повторяющиеся процессы в механических системах. В зависимости от характера воздействия на колеблющуюся систему различают свободные (собственные) и вынужденные колебания, автоколебания и параметрические колебания.
Свободными или собственными называются такие колебания, которые происходят в системе, предоставленной самой себе после того, как ей был сообщен толчок либо она была выведена из положения равновесия.
Вынужденными называются такие колебания, в процессе которых колеблющаяся система подвергается воздействию внешней периодической изменяющейся силы.
Автоколебания сопровождаются воздействием на колеблющуюся систему внешних сил, однако, моменты времени, когда осуществляется это воздействие, задаются самой системой.
При параметрических колебаниях за счет внешнего воздействия происходит периодическое изменение, какого либо параметра системы.
Маятник – это твердое тело, совершающее колебания вокруг неподвижной точки под действием силы тяжести.
Математическим
маятником
называют идеализированную систему,
состоящую из невесомой и нерастяжимой
нити, на которой подвешена масса,
сосредоточенная в одной т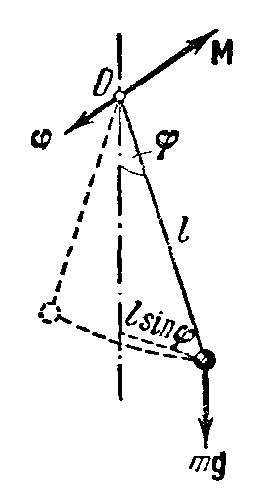 очке.
Отклонение маятника от положения
равновесия будем характеризовать углом
,
образованным нитью с вертикалью. При
отклонении маятника от положения
равновесия возникает вращательный
момент сил:
очке.
Отклонение маятника от положения
равновесия будем характеризовать углом
,
образованным нитью с вертикалью. При
отклонении маятника от положения
равновесия возникает вращательный
момент сил:
![]() .
.
Момент
инерции маятника равен:
![]() .
Уравнение динамики вращательного
движения для маятника имеет вид
.
Уравнение динамики вращательного
движения для маятника имеет вид
![]() ,
где
,
где
![]() - угловое ускорение. Получим:
- угловое ускорение. Получим:
![]() .
Это уравнение приведем к виду:
.
Это уравнение приведем к виду:
![]()
Для
малых колебаний
![]() .
Обозначив
.
Обозначив![]() ,
получим уравнение колебаний математического
маятника:
,
получим уравнение колебаний математического
маятника:
![]() .
.
Физический
маятник
– это твердое тело, совершающее колебания
вокруг неподвижной точки под действием
силы тяжести. При отклонении маятника
от положения равновесия на угол
,
возникает вращательный момент сил
,
где
-
расстояние между т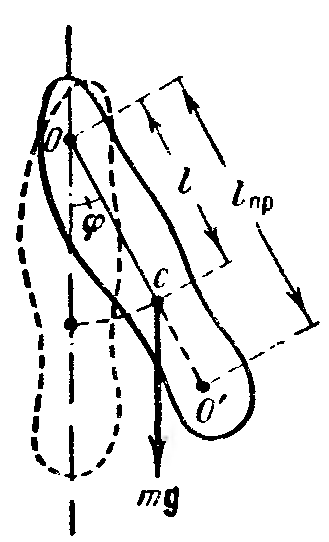 очкой
подвеса и центром масс маятника. Обозначив
-
момент инерции маятника относительно
оси, проходящей через точку подвеса,
запишем уравнение динамики вращательного
движения:
очкой
подвеса и центром масс маятника. Обозначив
-
момент инерции маятника относительно
оси, проходящей через точку подвеса,
запишем уравнение динамики вращательного
движения:
![]() .
Это уравнение представим в виде:
.
Это уравнение представим в виде:
,
где
обозначено
![]() .
.
Рассмотрим
колебания материальной точки вдоль оси
под
действием упругой силы
,
где
![]() -
жесткость пружины. Уравнение второго
закона Ньютона для материальной точки
имеет вид:
-
жесткость пружины. Уравнение второго
закона Ньютона для материальной точки
имеет вид:
![]() .
Это уравнение приведем к виду:
.
Это уравнение приведем к виду:
![]() ,
,
где
обозначено
![]() .
Таким образом, колебания всех трех
механических систем описываются
дифференциальными уравнениями одного
и того же вида. Его решением является
кинематическое уравнение гармонических
колебаний:
.
Таким образом, колебания всех трех
механических систем описываются
дифференциальными уравнениями одного
и того же вида. Его решением является
кинематическое уравнение гармонических
колебаний:
![]() ,
,
где
-
амплитуда колебаний;
![]() -
собственная угловая или циклическая
частота колебательной системы;
-
собственная угловая или циклическая
частота колебательной системы;
![]() -
начальная фаза.
-
начальная фаза.
а) Математический маятник
![]() ,
(
,
(![]() - ускорение свободного падения,
- длина нити маятника). Период собственных
колебаний
- ускорение свободного падения,
- длина нити маятника). Период собственных
колебаний
![]() .
.
б) Физический маятник
![]() ,
(
- ускорение свободного падения,
- расстояние от точки подвеса до центра
масс). Период собственных колебаний
,
(
- ускорение свободного падения,
- расстояние от точки подвеса до центра
масс). Период собственных колебаний
![]() .
.
б) Пружинный маятник
![]() ,
(
- жесткость пружины,
- масса маятника). Период
собственных колебаний
,
(
- жесткость пружины,
- масса маятника). Период
собственных колебаний
![]() .
.
Скорость и ускорение материальной точки, совершающей гармонические колебания:
![]() .
.
Сложение гармонических колебаний одного направления и одинаковой частоты:
а) амплитуда результирующего колебания:
![]() ;
;
б) начальная фаза результирующего колебания:
![]() .
.
Механические колебания при наличии сил трения.
Во всякой
реальной колебательной системе имеются
силы сопротивления, действие которых
приводит к уменьшению энергии системы.
В простейшем случае, сила сопротивления
пропорциональна скорости движения
системы
![]() ,
где
-
коэффициент сопротивления. Уравнение
второго закона Ньютона при наличии сил
сопротивления имеет вид:
,
где
-
коэффициент сопротивления. Уравнение
второго закона Ньютона при наличии сил
сопротивления имеет вид:
![]() .
.
Обозначив
![]() ,
уравнение приведем к виду:
,
уравнение приведем к виду:
![]() .
.
Э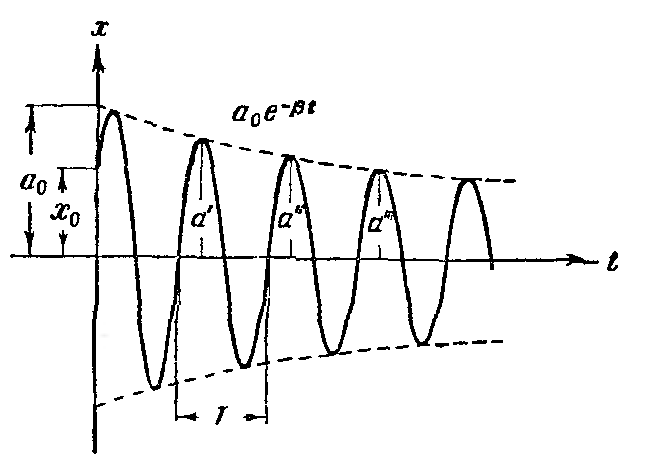 то
дифференциальное уравнение описывает
затухающие колебания системы. Его
решение представляет собой кинематическое
уравнение затухающих колебаний:
то
дифференциальное уравнение описывает
затухающие колебания системы. Его
решение представляет собой кинематическое
уравнение затухающих колебаний:
![]() .
.
где![]() .
.
Период
затухающих колебаний
![]() .
Декремент
затухания
– отношение значений амплитуд в моменты
времени, отличающиеся на период
.
Декремент
затухания
– отношение значений амплитуд в моменты
времени, отличающиеся на период
![]() .
Логарифмический
декремент затухания
.
Логарифмический
декремент затухания
![]() .
Закон убывания амплитуды можно записать
в виде:
.
Закон убывания амплитуды можно записать
в виде:
![]() .
.
За время
![]() ,
за которое амплитуда уменьшается в
,
за которое амплитуда уменьшается в
![]() раз, система совершает
раз, система совершает
![]() колебаний.
Получается
колебаний.
Получается
![]() .
Следовательно, логарифмический декремент
затухания обратен по величине числу
колебаний за время, за которое амплитуда
убывает в
раз.
Добротность
колебательной системы
.
Следовательно, логарифмический декремент
затухания обратен по величине числу
колебаний за время, за которое амплитуда
убывает в
раз.
Добротность
колебательной системы
![]() .
.
Вынужденные колебания.
Вынужденными называются такие колебания, которые возникают в системе под действием периодически изменяющейся силы. Уравнение движения имеет вид:
![]()
Разделив это уравнение на , получим:
![]() ,
,
где![]() .
После включения вынуждающей силы через
определенное в
.
После включения вынуждающей силы через
определенное в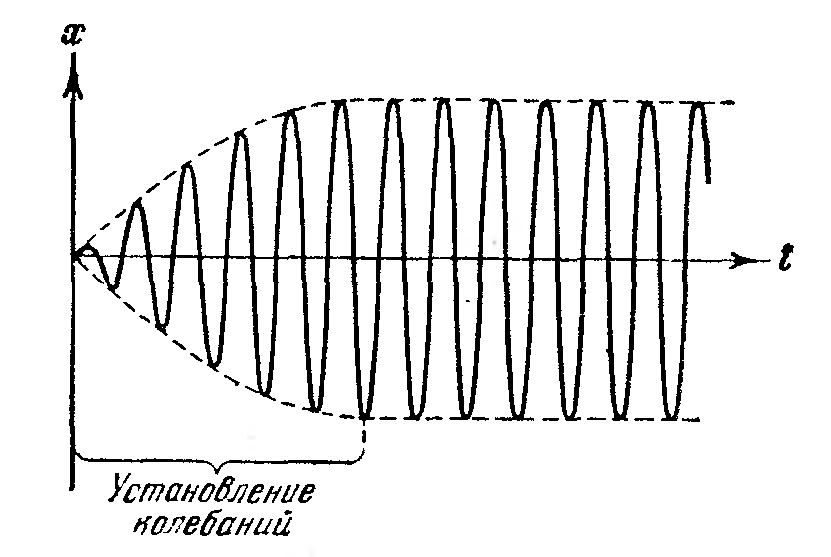 ремя
наступают установившиеся колебания.
Амплитуда колебаний зависит от частоты
периодически изменяющейся силы по
формуле:
ремя
наступают установившиеся колебания.
Амплитуда колебаний зависит от частоты
периодически изменяющейся силы по
формуле:
 ,
,
где
- частота внешнего воздействия на
колебательную систему. При частоте
![]() возникает
резонанс, при котором а
возникает
резонанс, при котором а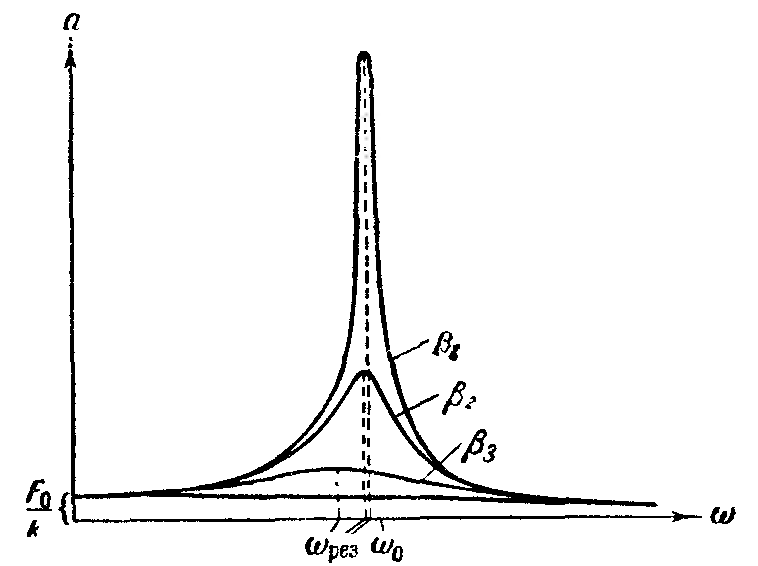 мплитуда
колебаний достигает максимальное
значение
мплитуда
колебаний достигает максимальное
значение
![]() .
.
Одномерное распространение волны.
Процесс распространения колебаний в среде называется волной. Частицы среды, в которой распространяется волна, не переносятся волной, они совершают колебания около положения равновесия. Уравнение волны имеет вид:
![]() ,
,
где![]() - смещение
любой из точек среды с координатой х
в
момент t;
v
- скорость
распространения колебаний в
среде,
- смещение
любой из точек среды с координатой х
в
момент t;
v
- скорость
распространения колебаний в
среде,
![]() - фаза волны.
- фаза волны.
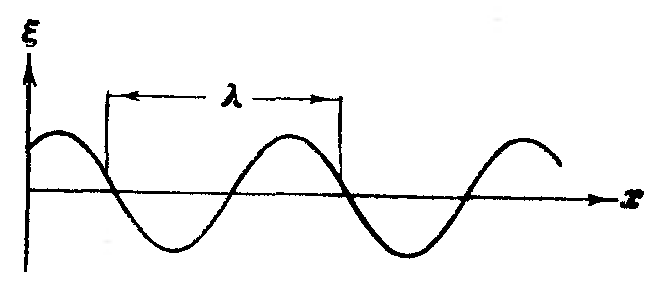
Связь
разности фаз
колебаний с расстоянием
![]() между
точками среды, отсчитанным в направлении
распространения
колебаний;
между
точками среды, отсчитанным в направлении
распространения
колебаний;
![]()
 ,
,
где![]() - длина волны.
- длина волны.
Скорости волн:
а)
продольные волны в упругой среде
![]() ,
(
- модуль Юнга,
,
(
- модуль Юнга,
![]() - плотность среды);
- плотность среды);
б)
продольные акустические волны в идеальном
газе
![]() ,
(
- отношение удельных теплоемкостей при
постоянном давлении и при постоянном
объеме,
- универсальная газовая постоянная,
- температура газа,
- молярная масса);
,
(
- отношение удельных теплоемкостей при
постоянном давлении и при постоянном
объеме,
- универсальная газовая постоянная,
- температура газа,
- молярная масса);
Синусоидальные волны:
![]() ,
,
где
- амплитуда волны,
![]() - волновое число,
- волновое число,
![]() - длина волны,
- угловая или циклическая частота,
- длина волны,
- угловая или циклическая частота,
![]() - частота волны,
- период волны.
- частота волны,
- период волны.
Стоячая волна – сумма падающей и отраженной волн:
![]() ,
,
где![]() - падающая волна,
- падающая волна,
![]() - отраженная волна.
- отраженная волна.
Лекция 6. Элементы релятивистской механики.
Релятивистская механика описывает движения тел со скоростями сравнимыми со скоростью света. Эта механика учитывает требования специальной теории относительности, которая представляет собой физическую теорию пространства и времени для случая слабых гравитационных полей. Основу теории образуют два постулата, которые называются принцип относительности Эйнштейна и принцип постоянства скорости света.
Принцип относительности Эйнштейна.
Все законы природы одинаковы во всех инерциальных системах отсчета.
Уравнения, выражающие законы природы, инвариантны по отношению к преобразованиям координат и времени от одной инерциальной системы отсчета к другой.
Принцип постоянства скорости света.
Скорость света в вакууме одинакова во всех инерциальных системах отсчета и не зависит от движения источников и приемников света.
В классической механике считается, что
существует абсолютное пространство и
абсолютное время. Было очевидным, что
два одновременных события в одной
системе координат будут одновременны
и в другой системе. Это утверждение
противоречит принципу постоянства
скорости света. Пусть тело
![]() движется
вдоль прямой линии со скоростью
движется
вдоль прямой линии со скоростью
![]() относительно
тела
относительно
тела
![]() .
Поместим на этой прямой два тела
.
Поместим на этой прямой два тела
![]() и
и![]() равноудаленных
от
и
жестко с ним связанных. Световой сигнал,
испускаемый из центра тела
в
движущейся системе координат, будет
достигать тел
и
в
один и тот же момент времени. В системе
о
равноудаленных
от
и
жестко с ним связанных. Световой сигнал,
испускаемый из центра тела
в
движущейся системе координат, будет
достигать тел
и
в
один и тот же момент времени. В системе
о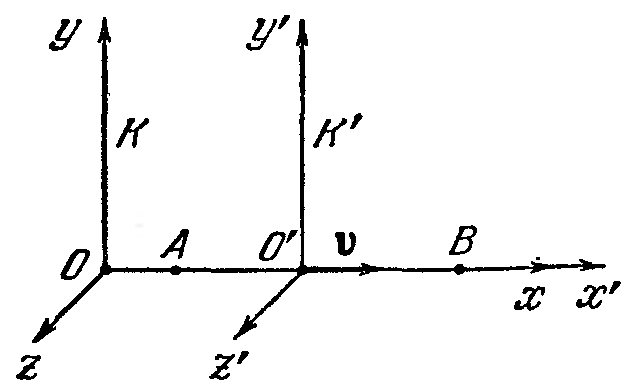 тсчета
тело
движется
навстречу световому сигналу, в то время
как тело
движется
в ту же сторону, что и сигнал. Поэтому
сигнал достигнет тела
раньше,
чем тела
.
Следовательно
тсчета
тело
движется
навстречу световому сигналу, в то время
как тело
движется
в ту же сторону, что и сигнал. Поэтому
сигнал достигнет тела
раньше,
чем тела
.
Следовательно
![]() .
Это означает, что одновременные события
в системе
оказываются
неодновременными в системе
.
Другими словами, время в разных системах
отсчета течет неодинаково.
.
Это означает, что одновременные события
в системе
оказываются
неодновременными в системе
.
Другими словами, время в разных системах
отсчета течет неодинаково.
Постоянство скорости света приводит
к взаимосвязи пространства и времени,
которое представляется с помощью
воображаемого четырехмерного
пространства-времени. По трем осям этого
пространства откладываются пространственные
координаты
![]() ,
а по четвертой оси отложено
,
а по четвертой оси отложено
![]() .
.
Мировая точка – точка в четырехмерном пространстве, которой отвечает какое либо событие.
Мировая линия – линия в четырехмерном пространстве, которая отвечает движению частицы.
Трехмерное пространство обладает
евклидовой метрикой. В нем квадрат
расстояния между двумя точками равен
сумме квадратов разностей координат:![]() .
Интервалом называется квадрат
расстояния между двумя мировыми точками:
.
Интервалом называется квадрат
расстояния между двумя мировыми точками:
![]() .
Это псевдоевклидово пространство.
Интервал является инвариантом – он
одинаков во всех инерциальных системах
отсчета.
.
Это псевдоевклидово пространство.
Интервал является инвариантом – он
одинаков во всех инерциальных системах
отсчета.
Преобразования Лоренца.
Рассмотри две инерциальные системы
отсчета
и
.
Система
движется
вдоль оси
![]() со
скоростью
со
скоростью
![]() относительно
системы
.
В классической механике переход от
координат и времени одной инерциальной
системы отсчета к другой осуществляется
с помощью преобразований Галилея. Из
них вытекает закон сложения скоростей
относительно
системы
.
В классической механике переход от
координат и времени одной инерциальной
системы отсчета к другой осуществляется
с помощью преобразований Галилея. Из
них вытекает закон сложения скоростей
![]() .
Он противоречит принципу постоянства
скорости света. Этому принципу
удовлетворяют преобразования Лоренца:
.
Он противоречит принципу постоянства
скорости света. Этому принципу
удовлетворяют преобразования Лоренца:
 .
.
Формулы преобразования для перехода от системы к системе имеют вид:
 .
.
Из преобразований Лоренца вытекаю следующие следствия.
Одновременность событий в разных
системах отсчета. В системе
в
точках
![]() происходят
одновременно события в момент
происходят
одновременно события в момент
![]() .
В системе
они
не будут одновременными
.
В системе
они
не будут одновременными
 ,
,
если они произошли в различных точках
пространства
![]() .
.
Длина тела в разных системах. Стержень
в движущейся системе отсчета
имеет
длину
![]() .
Относительно покоящейся системы
он
движется со скоростью
.
Относительно покоящейся системы
он
движется со скоростью
![]() .
Для определения его длины в этой системе
нужно отметить координаты концов стержня
в
один и тот же момент времени
.
Их разность даст длину стержня
.
Для определения его длины в этой системе
нужно отметить координаты концов стержня
в
один и тот же момент времени
.
Их разность даст длину стержня
![]() ,
где:
,
где:
![]() .
.
Из этой формулы получим
![]() .
Длина стержня, измеренная в системе,
о
.
Длина стержня, измеренная в системе,
о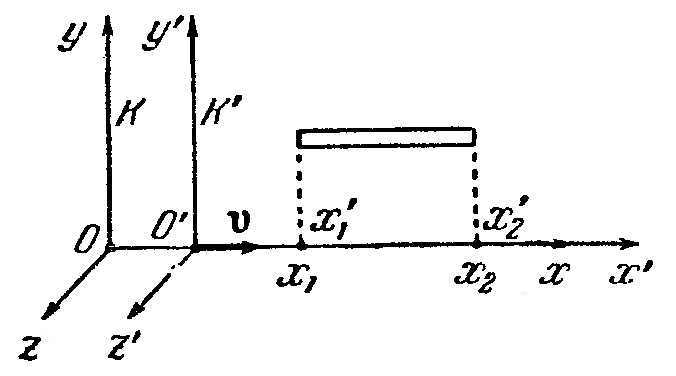 тносительно
которой он движется, меньше его длины
в системе, относительно которой он
покоится. Это явление называется
лоренцовым сокращением. Визуально
изменение формы тел не может быть
обнаружено, так как регистрируемые
импульсы света от различных участков
тела испускаются не одновременно. Это
искажение компенсирует лоренцово
сокращение.
тносительно
которой он движется, меньше его длины
в системе, относительно которой он
покоится. Это явление называется
лоренцовым сокращением. Визуально
изменение формы тел не может быть
обнаружено, так как регистрируемые
импульсы света от различных участков
тела испускаются не одновременно. Это
искажение компенсирует лоренцово
сокращение.
Промежуток времени между событиями.
Пусть в точке
![]() движущейся
системы
происходят
два события в моменты времени
движущейся
системы
происходят
два события в моменты времени
![]() .
Этим событиям в покоящейся
системе
соответствуют
моменты времени:
.
Этим событиям в покоящейся
системе
соответствуют
моменты времени:
![]() .
Обозначив
.
Обозначив
![]() и
и
![]() ,
получим формулу:
,
получим формулу:![]() ,
которая связывает промежутки времени
между двумя событиями в системах
и
.
Время, отсчитываемое по часам, движущимся
вместе с телом, называется собственным
временем этого тела
.
Следовательно
,
которая связывает промежутки времени
между двумя событиями в системах
и
.
Время, отсчитываемое по часам, движущимся
вместе с телом, называется собственным
временем этого тела
.
Следовательно
![]() .
Собственное время всегда меньше времени,
отсчитанное по часам, движущимся
относительно тела. Движущиеся часы идут
медленнее, чем покоящиеся.
.
Собственное время всегда меньше времени,
отсчитанное по часам, движущимся
относительно тела. Движущиеся часы идут
медленнее, чем покоящиеся.
Каждому событию в четырехмерном
пространстве можно сопоставить мировую
точку. Пусть одно событие имеет координаты
![]() ,
а другое событие имеет координаты
,
а другое событие имеет координаты
![]() .
Обозначим:
.
Обозначим:
![]() .
Квадрат расстояния между мировыми
точками определяется формулой:
.
Квадрат расстояния между мировыми
точками определяется формулой:
Величина
![]() называется
интервалом. Так как квадрат расстояния
между двумя точками в трехмерном
пространстве равен
называется
интервалом. Так как квадрат расстояния
между двумя точками в трехмерном
пространстве равен![]() ,
то интервал можно представить в виде:
,
то интервал можно представить в виде:
![]()
Интервал между двумя данными событиями одинаков во всех инерциальных системах отсчета:
![]() .
.
Интервал является инвариантом по отношению к переходу от одной инерциальной системе к другой.
Преобразование и сложение скоростей.
Пусть система
движется
вдоль оси
со
скоростью
относительно
неподвижной системы координат
.
Пусть тело движется относительно
системы
вдоль
оси
со
скоростью
![]() ,
а в системе
со
скоростью
,
а в системе
со
скоростью
![]() .
Воспользовавшись преобразованиями
Лоренца, получим:
.
Воспользовавшись преобразованиями
Лоренца, получим:
 .
.
Разделив первое равенство на второе, приходим к закону сложения скоростей при переходе от одной системы к другой:
![]() .
.
В случае малой скорости движения системы
![]() соотношение
переходит в формулу сложения скоростей
классической механики. Если система
движется со скоростью света, то подставив
в формулу
соотношение
переходит в формулу сложения скоростей
классической механики. Если система
движется со скоростью света, то подставив
в формулу
![]() ,
получим
,
получим
![]() .
Скорость света одинакова во всех системах
отсчета.
.
Скорость света одинакова во всех системах
отсчета.
Импульс в релятивистской механике.
Уравнения Ньютона инвариантны по
отношению к преобразованиям Галилея,
однако они не инвариантны по отношению
к преобразованиям Лоренца. Один из
основных законов механики – закон
сохранения импульса – не выполняется
при переходе от одной инерциальной
системы к другой. В релятивистской
механике выражение для импульса частицы
массы
![]() имеет
вид:
имеет
вид:
![]() .
.
Это выражение можно представить в виде:
![]() ,
,
где![]() -
промежуток собственного времени частицы,
определяемый по часам, движущимся вместе
с частицей,
-
промежуток собственного времени частицы,
определяемый по часам, движущимся вместе
с частицей,
![]() -
перемещение частицы в той же системе
отсчета, в которой определяется импульс.
При переходе к классической механики
малых скоростей
-
перемещение частицы в той же системе
отсчета, в которой определяется импульс.
При переходе к классической механики
малых скоростей
![]() выражение
преобразуется к виду
выражение
преобразуется к виду
![]() .
Выражение для релятивистского импульса
можно представить в виде:
.
Выражение для релятивистского импульса
можно представить в виде:
![]() ,
где масса является не постоянной
инвариантной величиной, а зависит от
скорости по формуле:
,
где масса является не постоянной
инвариантной величиной, а зависит от
скорости по формуле:
![]() .
.
Инвариантная масса
называется
массой покоя, а неинвариантная масса
![]() называется
массой движения.
называется
массой движения.
Энергия в релятивистской механике.
Уравнение второго закона Ньютона становится инвариантным для релятивистского импульса:
 .
.
Умножим это равенство на перемещение
частицы![]() .
В результате получим:
.
В результате получим:
 .
.
Правя часть равенства есть работа
![]() ,
совершаемая над частицей за время
,
совершаемая над частицей за время
![]() ,
которая идет на приращение ее кинетической
энергии
,
которая идет на приращение ее кинетической
энергии
![]() :
:
 .
.
После интегрирования соотношения,
получим
 .
При
.
При
![]() кинетическая энергия
кинетическая энергия
![]() ,
следовательно
,
следовательно![]() .
Релятивистское выражение для кинетической
энергии имен вид:
.
Релятивистское выражение для кинетической
энергии имен вид:
 .
.
В случае малых скоростей переходим к классическому выражению для кинетической энергии:
 .
.
Кроме кинетической энергии, частица
обладает энергией покоя
![]() .
Следовательно, полная энергия частицы
.
Следовательно, полная энергия частицы
![]() равна:
равна:![]() ,
которая определяется формулой:
,
которая определяется формулой:
 .
.
Энергия тела и его релятивистская масса
всегда пропорциональны друг другу.
Закон взаимосвязи релятивистской
массы и энергии – всякое изменения
энергии тела сопровождается изменением
его релятивистской массы
![]() .
.
Используя выражение для импульса, эту
формулу можно переписать в виде
![]() .
Положив в этой формуле
.
Положив в этой формуле
![]() ,
получим
,
получим![]() .
Частица с нулевой массой всегда движется
со скоростью света. К числу таких частиц
принадлежит фотон.
.
Частица с нулевой массой всегда движется
со скоростью света. К числу таких частиц
принадлежит фотон.
Лекция 7. Механика жидкости и газа.
Основная задача механики жидкости – определение пространственно – временного распределения давления и скорости внутри жидкости.
Гидростатика – жидкость находится в
покое, когда скорость каждой ее частицы
равна нулю. В этом случае давление
зависит от положения точки
![]() .
Давление действует п
.
Давление действует п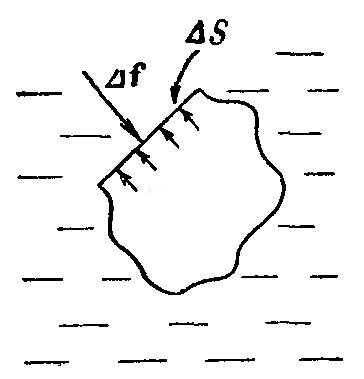 ерпендикулярно
к рассматриваемому элементу поверхности
и не зависит от его ориентации.
ерпендикулярно
к рассматриваемому элементу поверхности
и не зависит от его ориентации.
Несжимаемая жидкость – независимо от величины давления ее плотность остается постоянной.
Закон Паскаля. Давление, оказываемое на жидкость в какой-нибудь ее точке, передается жидкостью одинаково во всех направлениях.
 Действие
гидравлического пресса с несжимаемой
жидкостью:
Действие
гидравлического пресса с несжимаемой
жидкостью:
![]() .
Силы в двух поршнях с площадями
.
Силы в двух поршнях с площадями
![]() связаны
соотношением:
связаны
соотношением:
![]() .
Объем перемещаемой жидкости остается
постоянным
.
Объем перемещаемой жидкости остается
постоянным
![]() .
Следовательно, работа, производимая
приложенными к гидравлическому прессу
силами, одинакова:
.
Следовательно, работа, производимая
приложенными к гидравлическому прессу
силами, одинакова:![]() ,
где
,
где
![]() - силы, действующие на поршни,
- силы, действующие на поршни,
![]() -
смещения поршней.
-
смещения поршней.
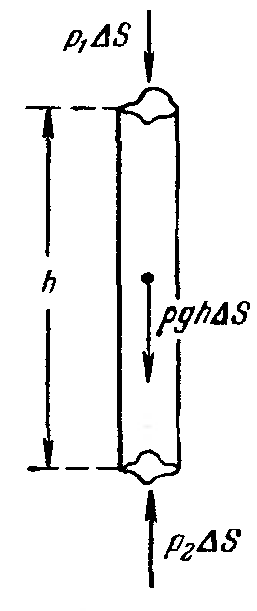
Изменение давления
![]() изменяется в зависимости от глубины
жидкости
:
изменяется в зависимости от глубины
жидкости
:
![]() ,
,
где
![]() - удельный вес жидкости,
- удельный вес жидкости,
![]() - давление жидкости на ее поверхности
при
- давление жидкости на ее поверхности
при
![]() .
.
Закон Архимеда. На всякое погруженное в жидкость тело действует выталкивающая сила, равная весу жидкости, вытесненной этим телом и приложенная к центру тяжести вытесненного телом объема.
П усть
усть
![]() -
давление на нижней поверхности тела,
-
давление на нижней поверхности тела,
![]() -
давление на верхней его поверхности. Разность
давлений будет
-
давление на верхней его поверхности. Разность
давлений будет
![]() .
Разность давлений приводит к появлению
силы
.
Разность давлений приводит к появлению
силы
![]() .
Сила Архимеда
.
Сила Архимеда
![]() .
.
Идеальная жидкость – несжимаемая жидкость без вязкости. Скорости меньше скорости звука и малые градиенты скоростей.
Линии тока – траектории, по которым движутся частицы жидкости, или это кривые, касательные к которым совпадают с направлением скорости частиц в этих точках.
Поток
жидкости характеризуется векторным
полем скоростей
![]() и скалярным полем давлений
и скалярным полем давлений
![]() .
.
Стационарный
поток – движение расположенных рядом
не пересекающихся струек. Скорость
направлена по касательной к линиям
тока. В стационарном потоке вид линий
тока о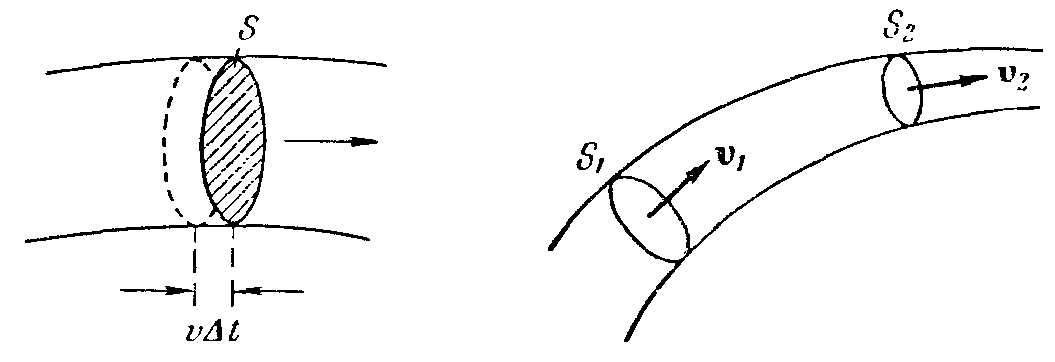 стается
неизменным. Уравнение неразрывности
потока стационарного течения жидкости
имеет вид:
стается
неизменным. Уравнение неразрывности
потока стационарного течения жидкости
имеет вид:
![]() ,
,
где
![]() - площади двух поперечных сечений трубки
тока,
- площади двух поперечных сечений трубки
тока,
![]() - скорости жидкости в двух поперечных
сечениях трубки тока.
- скорости жидкости в двух поперечных
сечениях трубки тока.
Уравнение Бернулли для идеальной жидкости вдоль линии тока:
![]() .
.
О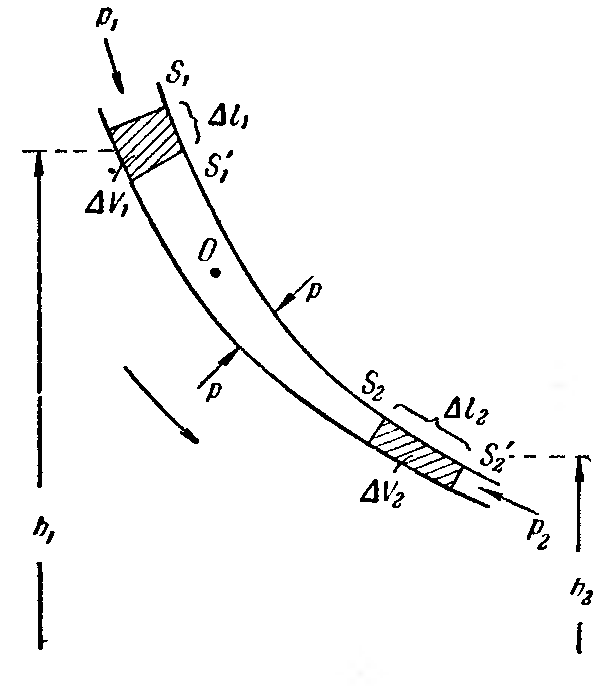 но
следует из уравнения Ньютона. Уравнение
Бернулли является выражением закона
сохранения энергии вдоль линии тока.
Потери на трение отсутствуют. Сила
давления всегда нормальна к поверхности.
Полная энергия единицы объема частицы
жидкости (сумма гидростатического
давления
,
кинетической энергии
но
следует из уравнения Ньютона. Уравнение
Бернулли является выражением закона
сохранения энергии вдоль линии тока.
Потери на трение отсутствуют. Сила
давления всегда нормальна к поверхности.
Полная энергия единицы объема частицы
жидкости (сумма гидростатического
давления
,
кинетической энергии
![]() и потенциальной энергии
и потенциальной энергии
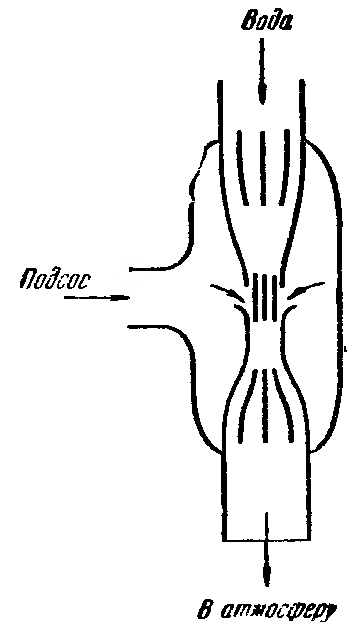
![]() )
вдоль трубки тока остается постоянной.
Действие водоструйного насоса основано
на этом законе:
)
вдоль трубки тока остается постоянной.
Действие водоструйного насоса основано
на этом законе:
 .
.
 Формула
Стокса
для малых скоростей течения жидкости
определяет силу сопротивления движению
шара в вязкой жидкости:
Формула
Стокса
для малых скоростей течения жидкости
определяет силу сопротивления движению
шара в вязкой жидкости:
![]() ,
,
где
![]() - коэффициент вязкости жидкости,
- радиус шара,
- коэффициент вязкости жидкости,
- радиус шара,
![]() - значение скорости жидкости на
бесконечности.
- значение скорости жидкости на
бесконечности.
Коэффициент поверхностного натяжения
![]() ,
или
,
или
![]() ,
,
где F
- сила
поверхностного натяжения, действующая
на
контур
,
ограничивающий поверхность жидкости;
![]() - изменение
свободной энергии поверхностной пленки
жидкости, связанное с изменением площади
- изменение
свободной энергии поверхностной пленки
жидкости, связанное с изменением площади
![]() поверхности
этой пленки.
поверхности
этой пленки.
Формула Лапласа, выражающая давление р, создаваемое сферической поверхностью жидкости:
![]() ,
,
где R - радиус сферической поверхности.
Высота подъема жидкости в капиллярной трубке
![]() ,
,
где![]() - краевой угол (
- краевой угол (![]() при полном смачивании стенок
трубки жидкостью;
при полном смачивании стенок
трубки жидкостью;
![]() - при полном несмачивании); R
- радиус
канала трубки;
- плотность жидкости; g
- ускорение
свободного падения.
- при полном несмачивании); R
- радиус
канала трубки;
- плотность жидкости; g
- ускорение
свободного падения.
Высота подъема жидкости между двумя близкими и параллельными друг другу плоскостями
![]() ,
,
где d - расстояние между плоскостями.