

8. Метод модального управления.
Метод модального управления заключается в том, чтобы изменять модуль собственного значения матрицы объекта для достижения оптимального переходного процесса. Задача в таком случае сводится к выбору обратной связи объекта, обеспечивающей оптимальное распределение корней характеристического уравнения в замкнутой системе.
G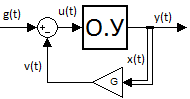 – матрица коэффициентов усиления
обратной связи. Возьмем свободную
систему, в ней можно обеспечить наилучшие
условия, тогда
– матрица коэффициентов усиления
обратной связи. Возьмем свободную
систему, в ней можно обеспечить наилучшие
условия, тогда
 и так как
и так как
 ,
а уравнение разомкнутой системы можно
записать как
,
а уравнение разомкнутой системы можно
записать как
 ,
то можно записать уравнение
,
то можно записать уравнение
 .
Корни характеристического уравнения
определяются из уравнения
.
Корни характеристического уравнения
определяются из уравнения
 .
Тогда коэффициенты
.
Тогда коэффициенты
 определяют расположение характеристических
корней. Пусть желаемое расположение
корней
определяют расположение характеристических
корней. Пусть желаемое расположение
корней
 .
Сравниваем эти два уравнения, получаем
требуемые коэффициент
.
Популярные расположения корней:
Биномиальное распределение:
.
Сравниваем эти два уравнения, получаем
требуемые коэффициент
.
Популярные расположения корней:
Биномиальное распределение:
 ,
все корни находятся в точке
,
все корни находятся в точке
 .
В этом случае вообще нет перерегулирования,
но с ростом порядка заметно уменьшается
быстродействие. П
.
В этом случае вообще нет перерегулирования,
но с ростом порядка заметно уменьшается
быстродействие. П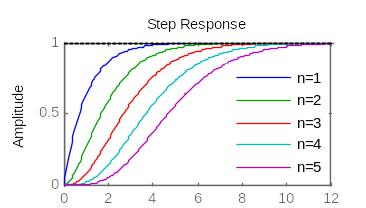 ри
использовании метода Баттерворта корни
располагаются на окружности радиуса
.
При этом быстродействие увеличивается,
но появляется выброс.
ри
использовании метода Баттерворта корни
располагаются на окружности радиуса
.
При этом быстродействие увеличивается,
но появляется выброс. 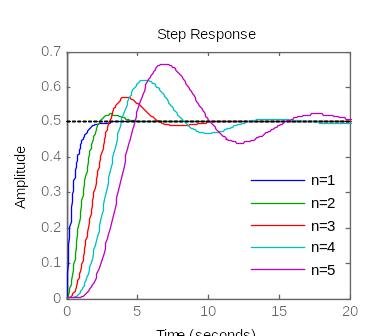 Также существуют методы минимизации
функционала, минимизации ошибки и
деления секторов на равные углы.
Также существуют методы минимизации
функционала, минимизации ошибки и
деления секторов на равные углы.
9. Основные свойства нелинейных систем
Основные
отличия нелинейных систем от линейных:
они по-разному реагируют на сигналы
разных величин
 ,
принцип аддитивности не работает
,
принцип аддитивности не работает
 ,
система меняет коэффициент усиления
в зависимости от входного сигнала,
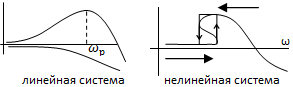
возникают автоколебания как признак
неустойчивости линеаризованной модели,
а также имеется скачкообразный резонанс:
,
система меняет коэффициент усиления
в зависимости от входного сигнала,
возникают автоколебания как признак
неустойчивости линеаризованной модели,
а также имеется скачкообразный резонанс:
Используется несколько методов исследования нелинейных систем: метод гармонический линеаризации для исследования систем любого порядка, являющий приближенным, метод фазовых плоскостей, являющийся точным, но ограниченный вторым порядком системы, а также метод численного интегрирования нелинейного дифференциального уравнения, описывающего систему.
10. Основные типы нелинейностей.
Зона насыщения или Saturation:

Зона нечувствительности или Dead zone:
Переменный коэффициент усиления:

Люфт:
Двухпозиционное реле:


Трехпозиционное реле:


Двухпозиционное реле с гистерезисом:

Трехпозиционное реле с гистерезисом:

11. Понятие фазовой плоскости, фазовой траектории и фазового портрета.
Система
автоматического управления может быть
описана системой из n
уравнений 1-ого порядка:
 с нулевыми начальными условиями.
Переменные
с нулевыми начальными условиями.
Переменные
 можно рассматривать как координаты
некоторой точки в n-мерном
пространстве. При изменении координат
эта точка описывает некоторую кривую,
называемую фазовой траекторией.
Совокупность таких траекторий, полученных
при различных начальных условиях,
называется фазовым портретом системы.
Наглядно представить фазовый портер
можно только для систем не выше второго
порядка. Исследование систем методом
фазовой плоскости (то есть рассмотрения
фазового портрета системы) возможно
только для систем, у которых в правой
части нет в явном виде переменной
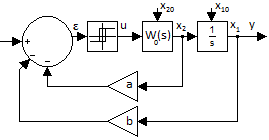
времени (автономных систем). Тогда для
системы второго порядка можно составить
блок-схему:
можно рассматривать как координаты
некоторой точки в n-мерном
пространстве. При изменении координат
эта точка описывает некоторую кривую,
называемую фазовой траекторией.
Совокупность таких траекторий, полученных
при различных начальных условиях,
называется фазовым портретом системы.
Наглядно представить фазовый портер
можно только для систем не выше второго
порядка. Исследование систем методом
фазовой плоскости (то есть рассмотрения
фазового портрета системы) возможно
только для систем, у которых в правой
части нет в явном виде переменной
времени (автономных систем). Тогда для
системы второго порядка можно составить
блок-схему:

Для
случая, где
 :
:
 .
.
1.
 ;
;
 – семейство траекторий:
– семейство траекторий:
2.
 –
семейство
траекторий:
–
семейство
траекторий:
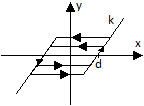
Ошибка
 ,
из этого можно получить формулу линии
переключения, которая имеет место при
ошибке, равной нулю:
,
из этого можно получить формулу линии
переключения, которая имеет место при
ошибке, равной нулю:
 ;
;
 .
.
Например,
при
 и
и
 :
:
При
 (отсутствие ООС) линия переключения
будет вертикальной.
(отсутствие ООС) линия переключения
будет вертикальной.
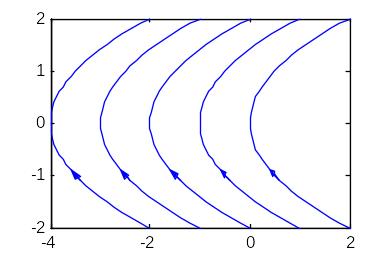
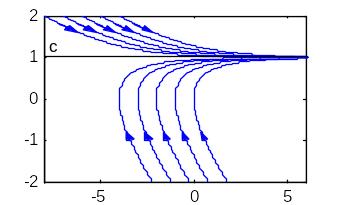
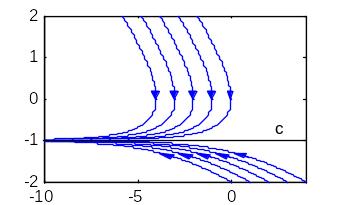
12. Фазовые траектории, соответствующие свободному движению объекту с заданной передаточной функцией: 1/s^2; 1/s(Ts+1); 1/s(Ts-1)
Для случая, где – перепиши, начиная с блок-схемы, с предыдущего билета.
Для
случая, где
 :
:
 ,
,
 ,
,

 ,
,
 .
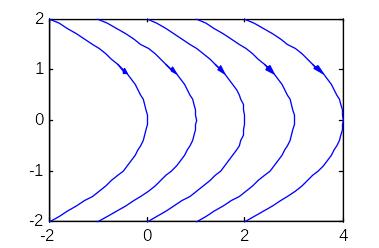
Для
траектории будут иметь вид:
.
Для
траектории будут иметь вид:
Для
 траектории будут иметь вид:
траектории будут иметь вид:
Для
случая
(например, неоднозначные нелинейности)
формула приобретает вид
 ,
то есть прямой линии с наклоном T.
,
то есть прямой линии с наклоном T.
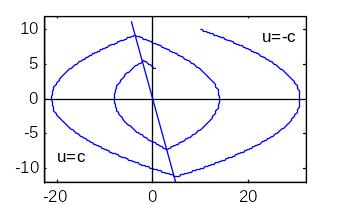
В
случае неоднозначных нелинейностей
линии переключения определяются
формулой
 (сигнал ошибки равен
(сигнал ошибки равен
 ).
Например, при
).
Например, при
 :
:
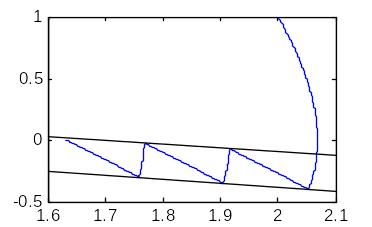
Такое
состояние системы называется скользящим
режимом. Для
 выведи сам.
выведи сам.
13.
Фазовые траектории вынужденного
движения объекта с заданной передаточной
функцией для управляющего сигнала
 .
.
Все
то же самое, что в предыдущем билете,
кроме линий переключений. Сигнал ошибки
становится
 ,
где
,
где
 – входной сигнал, например единичная
ступенька. В этом случае линия переключения
будет равна
– входной сигнал, например единичная
ступенька. В этом случае линия переключения
будет равна
 .
Для неоднозначной нелинейности
приравниваем сигнал ошибки
для определения линий переключения:
.
Для неоднозначной нелинейности
приравниваем сигнал ошибки
для определения линий переключения:
 ,
для единичной ступеньки линии переключения
будут такими:
,
для единичной ступеньки линии переключения
будут такими:
 .
.
14. Фазовые портреты системы, содержащих однозначные нелинейности.
Вся информация есть в 12 билете. Для однозначных нелинейностей фазовый портрет характеризуется однозначными линиями переключения (если кривая пересекает линию, она обязательно сменит характер движения).
15. Построение фазовых портретов систем, содержащих неоднозначные кусочно-линейные статические характеристики.
Вроде как снова 12 билет?
16. Характеристики фазового портрета (особые точки, предельные циклы)
У
фазового портрета имеются особые точки,
в которых нет однозначной кривой, по
которой двигается точка, следовательно,
в них объект находится в положении
равновесия. Математически эта точка
описывается системой уравнений
 . Система может входить в скользящий
режим, когда при прохождении через
линию переключения траектория заводит
точку обратно на линию и, таким образом,
подводит точку к состоянию равновесия.
Математически это можно выразить как
. Система может входить в скользящий
режим, когда при прохождении через
линию переключения траектория заводит
точку обратно на линию и, таким образом,
подводит точку к состоянию равновесия.
Математически это можно выразить как
 ,
где k
– наклон линии переключения. В реальных
системах это выглядит как дребезг и
чтобы его избежать вводят гистерезис.
При этом точка перемещается между двумя
линиями переключения, сходясь к состоянию
равновесия (последний рисунок билета
12). Такой режим работы называется
предельный цикл.
,
где k
– наклон линии переключения. В реальных
системах это выглядит как дребезг и
чтобы его избежать вводят гистерезис.
При этом точка перемещается между двумя
линиями переключения, сходясь к состоянию
равновесия (последний рисунок билета
12). Такой режим работы называется
предельный цикл.
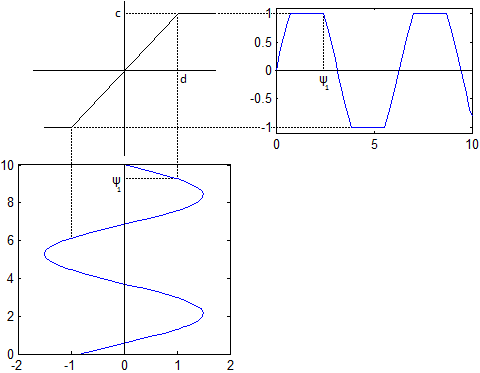
17. Гармоническая линеаризация нелинейностей.
Гармоническая линеаризация нелинейности заключается во взятии первой гармоники разложения в ряд Фурье выходного сигнала при прохождении гармонического сигнала через нелинейный элемент.
То
есть входной сигнал
 ,
выходной
,
выходной
 .
Выходной сигнал, также как и входной,
будет периодическим, и содержать в себе
бесконечное количество гармоник (при
проявлении нелинейных эффектов), начиная
с первой. Например:
.
Выходной сигнал, также как и входной,
будет периодическим, и содержать в себе
бесконечное количество гармоник (при
проявлении нелинейных эффектов), начиная
с первой. Например:

 ,
,
 – гармонически линеаризованный сигнал.
Тогда
– гармонически линеаризованный сигнал.
Тогда
 – некий коэффициент усиления гармонически
линеаризованного элемента. Тогда в
случае
– некий коэффициент усиления гармонически
линеаризованного элемента. Тогда в
случае
 коэффициент усиления будет
коэффициент усиления будет
 ,
а в случае
,
а в случае
 коэффициент будет другим (зависит от
нелинейности). В случае двузначных
нелинейностей
коэффициент будет другим (зависит от
нелинейности). В случае двузначных
нелинейностей
 ,
где
,
где
 ,
а
,
а
 .
Представляя в другой форме,
.
Представляя в другой форме,
 ,
то есть становится важным растет или
убывает сигнал. Также можно ввести
понятие эквивалентного гармонически
линеаризованного коэффициента усиления:
,
то есть становится важным растет или
убывает сигнал. Также можно ввести
понятие эквивалентного гармонически
линеаризованного коэффициента усиления:
 или в полярных координатах
или в полярных координатах
 ,
где
,
где
 и
и
 .
.