

4. Решение линейной стационарной системы в пространстве состояний.
Для
линейной стационарной системы переходная
матрица примет вид
для
случая, если матрица A
- диагональная. Проверяем является ли
такая матрица переходной:
 ,
оба условия удовлетворены. В общем
случае же
,
оба условия удовлетворены. В общем
случае же
 ,
где
,
векторы собственных значений можно
вычислить из
,
,
где
,
векторы собственных значений можно
вычислить из
,
 – матрица собственных значений вида
– матрица собственных значений вида
 .
Собственные значения можно получить
из уравнения
.
Собственные значения можно получить
из уравнения

5. Определение управляемости. Анализ управляемости системы.
Система
называется полностью управляемой, если
из произвольного начального состояния
 ее можно перевести в любое конечное
состояние
ее можно перевести в любое конечное
состояние
 ,
при помощи входного сигнала, заданного
на этом интервале времени (имея матрицы
A
и С). Заменим в пространстве переменных
состояний
,
при помощи входного сигнала, заданного
на этом интервале времени (имея матрицы
A
и С). Заменим в пространстве переменных
состояний
 и домножим 1ое уравнение на
и домножим 1ое уравнение на
 :
:
 ,
система приведена к диагональному
виду,
,
система приведена к диагональному
виду,
 ,
получим n
независимых уравнений.
,
получим n
независимых уравнений.
Т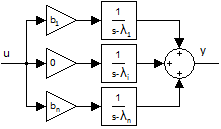 ак
как хотя бы один
ак
как хотя бы один
 равен нулю, то система неуправляема.
Для исследования управляемости нужно
получить матрицу
равен нулю, то система неуправляема.
Для исследования управляемости нужно
получить матрицу
 ,
и так как
,
и так как
 и
и
 невырожденная, то
невырожденная, то
 .
Условием полной управляемости будет
то, что ранг матрицы
.
Условием полной управляемости будет
то, что ранг матрицы
 .
.
6. Определение наблюдаемости. Анализ наблюдаемости системы.
Система
называется полностью наблюдаемой, если
возможно определить начальное состояние
,
имея ее математическое описание (матрицы
A
и C)
по выходному сигналу
 от начальных условий при
от начальных условий при
 .
Заменим в пространстве переменных
состояний
и домножим первое уравнение на
:
,
система приведена к диагональному
виду,
,
получим n
независимых уравн.
.
Заменим в пространстве переменных
состояний
и домножим первое уравнение на
:
,
система приведена к диагональному
виду,
,
получим n
независимых уравн.
Т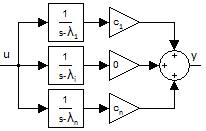 ак
как хотя бы один
ак
как хотя бы один
 равен нулю, то система не наблюдаема.
Для исследования наблюдаемости нужно
получить матрицу
равен нулю, то система не наблюдаема.
Для исследования наблюдаемости нужно
получить матрицу
 ,
и так как
,
и так как
 и
невырожденная, то о наблюдаемости можно
судить по прямоугольной матрице
и
невырожденная, то о наблюдаемости можно
судить по прямоугольной матрице
 .
Условием полной наблюдаемости будет
то, что ранг матрицы
.
Условием полной наблюдаемости будет
то, что ранг матрицы
 .
.
7. Условия управляемости и наблюдаемости Гильберта.
Условия Гильберта позволяют определить наблюдаемость и управляемость сложных систем.
 ,
,
 .
.
Для
последовательного соединения систем
 и
и
 :
:
 .
.
Необходимым
условием полной наблюдаемости системы
 является наблюдаемость
и
по отдельности. Если
и
полностью наблюдаемы, а
является наблюдаемость
и
по отдельности. Если
и
полностью наблюдаемы, а
 не наблюдаема, то ненаблюдаемые движения
обусловлены
.
Необходимым условием полной управляемости
системы
является полная управляемость
и
.
Если же
– неуправляема, то неуправляемые
движения принадлежит
.
не наблюдаема, то ненаблюдаемые движения
обусловлены
.
Необходимым условием полной управляемости
системы
является полная управляемость
и
.
Если же
– неуправляема, то неуправляемые
движения принадлежит
.
Для параллельного соединения систем и :
 .
.
Необходимым
и достаточным условием управляемости
и наблюдаемости системы
 является полная управляемость и
наблюдаемость каждой из подсистем, что
очевидно.
является полная управляемость и
наблюдаемость каждой из подсистем, что
очевидно.
Для соединения с обратной связью систем и :
Система
в отрицательной обратной связи. Тогда:
 .
.
Необходимым
и достаточным условием наблюдаемости
системы
 является наблюдаемость вспомогательной
системы
является наблюдаемость вспомогательной
системы
 .
Если
и
наблюдаемы, то ненаблюдаемые движения
являются движениями
.
Если
и
наблюдаемы, то ненаблюдаемые движения
являются движениями
 и порождаются
.
Необходимым и достаточным условием
полной управляемости системы
является управляемость вспомогательной
системы
и порождаются
.
Необходимым и достаточным условием
полной управляемости системы
является управляемость вспомогательной
системы .
Если
и
управляемы, то неуправляемые движения
являются движениями
и порождаются
.
.
Если
и
управляемы, то неуправляемые движения
являются движениями
и порождаются
.