vostrikov
.pdf

222 |
Глава 7. ЛИНЕЙНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ |
дельта-функций, в соответствии с принципом суперпозиции выход ПНЧ представляет собой сумму реакций на последовательность дельта-функ- ций, т. е. сумму импульсных переходных функций
y(t) u(kT )g(t kT ) .
k 0
Далее непрерывный выходной сигнал преобразуется в решетчатый по известной процедуре:
y* (t) u(kT )g(nT kT ) (t nT ) .
n0 k 0
Крешетчатому выходу y* (t) применяется преобразование Лапласа.
Витоге получаем изображение решетчатого выхода y* (s) :
y* (s) |
u(kT )g(nT kT )e nTs , |
n 0 k |
0 |
где g(t) – импульсная переходная функция ПНЧ. Введем новую переменную q = n – k, тогда n = q + k,
y* (s) |
u(kT )g(qT )e (q k )Ts |
g(qT )e qTs |
u(kT )e kTs . |
q k k 0 |
q 0 |
k |
0 |
Напомним, что ИПФ равна нулю при отрицательных значениях аргумента, при выводе было использовано это свойство. В итоге получим
y* (s) |
g(qT )e qTsu* (s) . |
q |
0 |
Операторное соотношение, связывающее изображения решетчатого входа и решетчатого выхода, есть дискретная передаточная функция
W * (s) |
g(qT )e qTs . |
q |
0 |

7.2. Динамические характеристики линейных импульсных систем |
223 |
Введем новый оператор z esT и назовем его оператором сдвига на шаг вперед, тогда изображение по Лапласу управляющего сигнала (7.6) можно представить в виде z-изображения
u(z) |
u(kT )z k , |
(7.8) |
k0
адискретная передаточная функция принимает вид
W (z) |
g(qT )z q . |
q |
0 |
Последовательно выполняя операторные преобразования ИПФ, построим цепочку выводов:
g(t) L 1 W (s) |
g(qT ) L 1 W (s) |
qT |
|
W (z) |
g(qT ) |
|||
|
|
|
|
|
|
|
|
|
W (z) |
L 1 W (s) |
|
W (z) Z |
1 z 1 |
W (s) |
|||
qT |
|
|
||||||
|
|
|
|
|
|
s |
O |
|
|
|
|
|
|
|
|
|
|
|
W (z) |
(1 z 1)Z |
WO (s) |
. |
(7.9) |
|||
|
|
|||||||
|
|
|
|
|
s |
|
||
Последнее равенство в этой цепочке (7.9) и есть рабочее соотношение для нахождения дискретной передаточной функции непрерывного объекта, при условии, что на его входе и выходе стоят экстраполяторы нулевого порядка.
Основные теоремы Z-преобразования приведены в приложении 1, а таблица Z-преобразования – в приложении 2.
ПРИМЕР 7.3
Задана передаточная функция непрерывного объекта
2
WO (s) 0, 04s2 0,5s 1 .
Необходимо найти дискретную передаточную функцию W (z) при шаге дискретизации по времени T = 0,02 с.
224 |
|
|
|
|
|
|
Глава 7. ЛИНЕЙНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ |
||||||||||||||
Предварительно произведем разложение передаточной функции |
WO (s) |
|
|||||||||||||||||||
s |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
на сумму простых дробей: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
WO (s) 1 |
2 |
2 |
2 1 |
8 1 |
. |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
s |
|
s 0, 04s2 |
|
0,5s 1 s |
3 |
s 10 |
3 |
s 2,5 |
|
|
||||||||||
Воспользуемся выражением (7.9), таблицей Z-преобразования (см. приложение) и получим
|
|
|
|
z 1 |
|
WO (s) |
z 1 |
|
2 2 |
1 |
8 |
|
|
1 |
|
|
||||||||||||||
W (z) |
|
|
|
|
Z |
|
|
|
|
|
|
|
|
Z |
|
|
|
|
* |
|
|
|
|
* |
|
|
|
|||
|
|
z |
|
|
|
|
s |
z |
|
s 3 |
s 10 |
3 |
s 2,5 |
|||||||||||||||||
|
z 1 |
2 |
z |
|
|
2 |
|
|
z |
8 |
|
|
|
z |
|
|
0, 0092z |
0, 0085 |
. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
z |
|
z |
1 |
3 z |
e 10T |
|
3 z |
e 2,5T |
|
|
z2 |
1, 77z |
0, 7788 |
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
Дискретная передаточная функция имеет второй порядок, такой же, как и исходная непрерывная передаточная функция
7.2.5. ДИСКРЕТНЫЕ ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
Дискретную передаточную функцию объекта найдем, используя систему разностных уравнений (7.2), по аналогии с непрерывной передаточной функцией (см. главу 2, разд. 2.6).
Если запишем уравнение состояния в операторной форме
zx(z) Ax(z) Bu(z) ,
из которого можно определить вектор состояния
x(z) (zI A) 1 Bu(z) ,
то второе уравнение системы (7.2) позволяет найти вектор выхода
y(z) C(zI A) 1 Bu(z) .
Матрица взаимосвязи между вектором выходных переменных и вектором управляющих воздействий в последнем выражении есть матричная передаточная функция
W (z) C(zI A) 1 B , |
(7.10) |

7.2. Динамические характеристики линейных импульсных систем |
225 |
||||
которая имеет размерность m m |
|
|
|
|
|
|
W11(z) ... W1m (z) |
|
|
||
W (z) |
... |
... |
... |
, |
|
|
Wm1(z) |
... |
Wmm(z) |
|
|
где Wij (z) – скалярная передаточная функция, связывающая управ-
ляющее воздействие ui (z) и выходную переменную y j (z) , i 1, m ,
j 1, m .
Представим нормированную передаточную функцию одноканального объекта в виде отношения полиномов числителя B(z) и знаменателя A(z):
|
B(z) |
|
b |
|
zn 1 |
... |
b z |
b |
|
|
|
W (z) |
|
|
n 1 |
|
|
1 |
0 |
|
. |
(7.11) |
|
A(z) |
|
z n |
an 1zn 1 |
|
|
|
|
||||
|
|
... |
a1z |
|
a0 |
|
|||||
Нормирование передаточной функции состоит в том, что коэффициент при старшей степени оператора z в знаменателе равен единице.
Отметим очень важное свойство дискретной передаточной функции: порядок полинома числителя у большинства объектов равен (n–1), где n – порядок объекта. Исключением из этого правила являются объекты, исходная непрерывная передаточная функция которых имеет полиномы числителя и знаменателя одинакового порядка, дискретная передаточная функция в этом случае также будет иметь полиномы числителя и знаменателя одинакового порядка, равного порядку объекта n:
|
B(z) |
|
b zn |
b |
zn 1 |
... |
b z |
b |
|
W (z) |
|
|
n |
n 1 |
|
|
1 |
0 |
. |
A(z) |
|
z n |
an 1zn 1 |
|
|
|
|||
|
|
... |
a1z |
a0 |
|||||
Коэффициент передачи объекта в статике K0 можно найти, используя теорему о конечном значении
|
|
|
|
n 1 |
|
|
|
|
|
B(z) |
|
|
bi |
|
|
K0 limW (z) |
lim |
|
i |
0 |
|
. |
|
|
|
|
|||||
|
|
|
n 1 |
|
|||
z 1 |
z 1 A(z) |
|
|
|
|
||
1 |
|
aj |
|||||
|
|
|
|
||||
|
|
|
|
|
j 0 |
|
|

226 Глава 7. ЛИНЕЙНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ
Перейдем от передаточной функции к разностному уравнению и для этого рассмотрим соотношение
y(z) W (z)u(z) . |
(7.12) |
Подставим в (7.12) передаточную функцию (7.11) и запишем разностное уравнение в операторной форме
zn y(z) a |
zn 1y(z) |
... a zy(z) a y(z) |
|
|
n 1 |
|
1 |
0 |
|
bn 1zn 1u(z) ... |
b1zu(z) |
b0u(z) . |
(7.13) |
|
Используя теоремы Z-преобразования, можно перейти от (7.13) к обычному разностному уравнению в дискретном времени
y(k n) an 1y(k |
n 1) |
... a1y(k |
1) a0 y(k) |
|
bn 1u(k n |
1) ... |
b1u(k 1) |
b0u(k) . |
(7.14) |
Сдвигом аргумента можно преобразовать (7.14):
y(k) an 1y(k |
1) ... a1y(k |
n |
1) a0 y(k n) |
bn 1u(k 1) |
... b1u(k n |
1) |
b0u(k n) . |
Как видим, текущее значение y(k) зависит от n предыдущих значений y(i) и u(i), что можно назвать свойством памяти динамических систем.
ПРИМЕР 7.4
Найти дискретную передаточную функцию по заданной системе разностных уравнений:
x1(k 1) x1(k) x2 (k) u(k),
x2 (k 1) 2x1(k) x2 (k) 2u(k), y(k) x1(k ) 2x2 (k ).
Запишем матрицы А, В, С дискретной модели:
A |
1 |
1 |
; |
B |
1 |
; C 1 2 . |
|
2 |
1 |
|
|
2 |
|

7.2. Динамические характеристики линейных импульсных систем |
227 |
Дискретную передаточную функцию для заданной системы разностных уравнений найдем по выражению (7.10). Сделаем это поэтапно:
1) |
zI |
A |
z 1 |
1 |
|
|
; |
|
|
|
|
|
|
|
|
||||||
2 |
z |
1 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
1)2 |
|
|
|
z2 |
|
|
|
|
|
|
|
||
2) det |
zI |
A |
|
(z |
2 |
|
2z |
|
|
3 ; |
|
|
|
||||||||
3) |
zI |
A 1 |
|
|
|
|
1 |
|
|
|
z |
1 |
1 |
; |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
z2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2z |
3 |
2 |
z |
1 |
|
|
|
|||||||
4) |
W (z) |
1 |
|
2 |
|
1 |
|
|
|
z |
1 |
|
|
1 |
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
z2 |
2z |
3 |
2 |
z 1 |
2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
1 |
|
|
|
|
z |
3 |
2z |
3 |
1 |
|
|
5z |
3 |
|
. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
z2 |
|
|
|
|
|
2 |
|
z2 2z 3 |
|||||||||||
|
|
2z 3 |
|
|
|
|
|
|
|
||||||||||||
Передаточная функция имеет второй порядок, такой, как порядок исходного разностного уравнения.
ПРИМЕР 7.5
Перейти от дискретной передаточной функции W(z) к разностному уравнению, где
W (z) |
0, 4z2 |
0,3z 0, 2 |
. |
|
z3 0, 6z2 |
0,9z 1, 2 |
|||
|
|
Поскольку передаточная функция есть отношение изображения выходного сигнала к изображению входного сигнала при нулевых начальных условиях, разностное уравнение в операторной форме имеет вид
(z3 0, 6z2 0, 9z 1, 2) y(z) (0, 4z2 0, 3z 0, 2)u(z) .
Воспользуемся теоремами Z-преобразования и получим разностное уравнение в дискретном времени
y(k 3) 0,6 y(k |
2) 0,9 y(k |
1) 1, 2 y(k) |
0, 4u(k 2) |
0,3u(k 1) |
0, 2u(k) . |
Как видим, порядок разностного уравнения n = 3 и совпадает с порядком исходной передаточной функции.

228 |
Глава 7. ЛИНЕЙНЫЕ ИМПУЛЬСНЫЕ СИСТЕМЫ |
7.2.6. ОБРАТНОЕ Z-ПРЕОБРАЗОВАНИЕ
Обратное Z-преобразование дает возможность перейти от изображения y(z) к значениям y(kT) только в фиксированные моменты времени, соответствующие шагу квантования. При этом обратное Z-преобра- зование не дает ответа на вопрос, как изменяется значение y(t) между этими точками (рис. 7.11).
Предположим, что изображение исследуемого сигнала y(z) известно и имеет вид правильной дроби. Разделим числитель этой дроби на знаменатель и получим бесконечный ряд:
|
y(z) |
c |
c z 1 |
... c z |
k ... . |
|
|
|
|
0 |
1 |
k |
|
|
|
y(kT ) |
* |
* |
* |
|
|
|
|
|
|
|
|
|
|||
|
|
* |
|
|
|
||
|
|
|
|
|
|
|
|
|
* |
|
|
* |
* |
* |
* |
|
|
|
|
|
|||
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
0 T 2T |
3T |
4T |
|
|
|
kT |
Рис. 7.11. Пример восстановленного сигнала
Запишем изображение для исследуемого сигнала по аналогии с полученным ранее изображением для управляющего сигнала (7.8):
y(z) |
y(kT )z k . |
k |
0 |
Сравнивая два последних равенства, получим:
y(0) c0 , y(1) c1, ... , y(k) ck , ... .
Обратное Z-преобразование позволяет получить оригинал по изображению, но только в фиксированные моменты времени.

7.2. Динамические характеристики линейных импульсных систем |
229 |
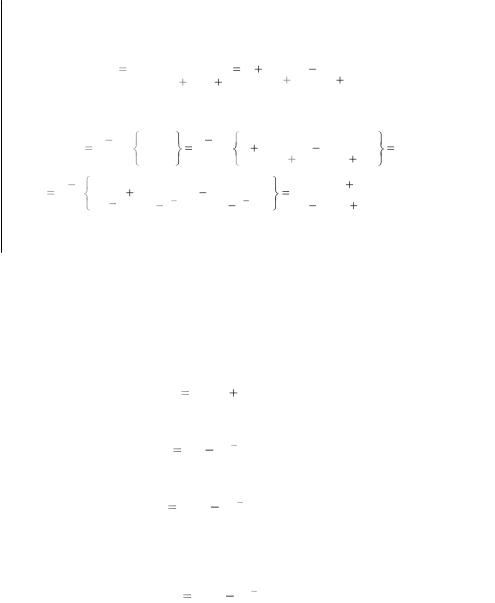
7.2.7. СТРУКТУРНЫЕ ПРЕДСТАВЛЕНИЯ ДИСКРЕТНЫХ СИСТЕМ
Рассмотрим некоторые правила преобразования структурных схем линейных дискретных систем.
u |
|
|
x1 |
|
y |
|||
W1 |
(z) |
W2 (z) |
||||||
|
|
|
|
|
||||
Рис. 7.12. Последовательное соединение звеньев
Правило: передаточная функция последовательного соединения звеньев (рис. 7.12) равна произведению передаточных функций этих звеньев
W(z) W1(z) W2 (z) .
u |
|
|
|
|
|
|
x1 |
|
y |
|||
ЭНП |
u |
W1 |
(s) |
W2 (s) |
||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 7.13. Последовательное соединение двух непрерывных звеньев
Правило: передаточная функция последовательного соединения двух непрерывных звеньев, не разделенных экстраполятором (рис. 7.13), равна Z-преобразованию произведения передаточных функций этих звеньев
|
|
W (z) |
1 z 1 Z |
|
W1(s)W2 (s) |
. |
|
|
|||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
u |
|
|
|
|
|
|
x1 |
|
|
x1 |
|
|
|
y |
|||
|
ЭНП |
u |
W1(s) |
|
ЭНП |
|
W2 |
(s) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис. 7.14. Последовательное соединение двух непрерывных звеньев, разделенных экстраполяторами