

10.3. Статические критерии диагностики состояний
Все статические критерии трактуют
следующим образом: в окрестности всякого
диагностируемого состояния N
(“норма”) или A (“не
норма”) параметры состояния распределены
по некоторому статистическому закону,
и поэтому мы заранее согласны с тем, что
имеется некоторая вероятность ошибки,
которую мы будем минимизировать.
Получаемые результаты зависят от ряда
упрощающих предположений (априорные
вероятности состояний
![]() ,
,
![]() ,
цена допускаемой ошибки
,
цена допускаемой ошибки
![]() )
и статистических характеристик самого
вероятностного распределения (например,
в ряде случаев для этого достаточно
определить математическое ожидание
)
и статистических характеристик самого
вероятностного распределения (например,
в ряде случаев для этого достаточно
определить математическое ожидание
![]() и дисперсию
и дисперсию
![]() - для одномерного случая; - либо вектор
математических ожиданий
- для одномерного случая; - либо вектор
математических ожиданий
![]() и ковариационную матрицу
и ковариационную матрицу
![]() - для многомерных распределений).
- для многомерных распределений).
Рассмотрим разные случаи (одномерный, 2х-мерный, многомерный) по мере усложнения.
10.4.1. Одномерный случай – пусть в области
изменения параметра X
возможны два состояния: (норма – не
норма), для каждого из которых известны
законы распределения вероятностей
![]() .
.
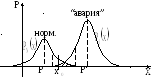
Рисунок 10.3
Как правило, эти вероятности имеют
соответствующий максимум
![]() в точках
в точках
![]() и
и
![]() ,
и существует некоторая область изменения
x, в которой с некоторой
вероятностью возможны одновременно
оба состояния (например, для значения
,
и существует некоторая область изменения
x, в которой с некоторой
вероятностью возможны одновременно
оба состояния (например, для значения
![]() имеем
имеем
![]() и
и
![]() ).
На рисунке эта область заштрихована.
Диагностическое правило в этом простом
случае стремятся получить в таком виде:
).
На рисунке эта область заштрихована.
Диагностическое правило в этом простом
случае стремятся получить в таком виде:
Заметим, что
![]() может быть отнесен к состоянию “авария”,
но это несущественно.
может быть отнесен к состоянию “авария”,
но это несущественно.
Если выбор
![]() осуществляется по критерию минимального
среднего риска (средних потерь от
неправильной диагностики), то имеет
место следующая система соотношений [
]:
осуществляется по критерию минимального
среднего риска (средних потерь от
неправильной диагностики), то имеет
место следующая система соотношений [
]:
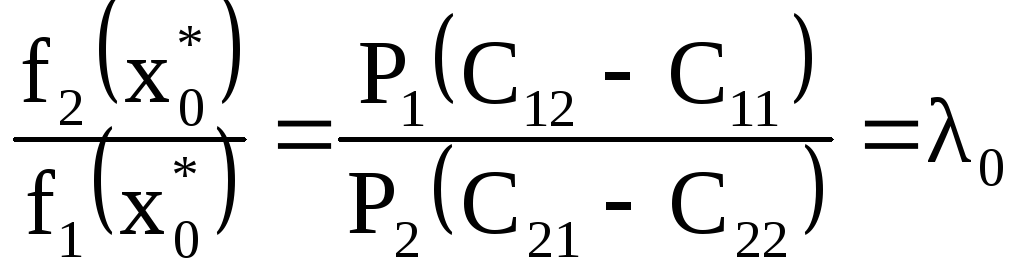
Здесь
![]() и
и
![]() - априорные вероятности событий 1-норма
и 2-авария,
- априорные вероятности событий 1-норма
и 2-авария,
![]() и
и
![]() - потери от ошибочной классификации
(объект класса «1» отнесен к классу «2»
и наоборот),
- потери от ошибочной классификации
(объект класса «1» отнесен к классу «2»
и наоборот),
![]() и
и
![]() - потери (затраты) при правильных решениях.
- потери (затраты) при правильных решениях.
Отношение
![]() принято называть коэффициентом
правдоподобия.
принято называть коэффициентом
правдоподобия.
Если считать, что параметр x распределен по нормальному вероятностному закону, то
Тогда искомое
![]() определяется из соотношения:
определяется из соотношения:

и далее находим, что

Для практического использования имеют значения два наиболее распространенных случая:
а) при одинаковых дисперсиях
![]() имеем
имеем
![]()
б) если матрицы цен и априорные вероятности
выбраны так, что
![]() ,
то при одинаковых дисперсиях имеем:
,
то при одинаковых дисперсиях имеем:
![]()
Таким образом, статистическая диагностика в одномерном случае сводится к правилу:
где значение
![]() вычисляется по несколько разным формулам,
которые удобно привести к общему виду:
вычисляется по несколько разным формулам,
которые удобно привести к общему виду:
![]() ,
,
Здесь значение поправки
![]() зависит от ряда дополнительных
предположения, что удобно при адаптивных
настройках:
зависит от ряда дополнительных
предположения, что удобно при адаптивных
настройках:
![]() на ряде шагах процедуры адаптации, в
т.ч. при использовании рекуррентного
алгоритма обучения:
на ряде шагах процедуры адаптации, в
т.ч. при использовании рекуррентного
алгоритма обучения:
![]()
10.4.2. Рассмотрим теперь диагностику в
пространстве двух разных параметров
![]() .
.
Предположим, что в окрестности состояний
1 и 2 определена некоторая область и мы
ставим задачу отделить их друг от друга
путем построения некоторой вычисляемой
функции
![]() ,
такой, что при
,
такой, что при
В самом общем случае вид такой функции
![]() заранее неизвестен, обычно ее называют
дискриминантной функцией
заранее неизвестен, обычно ее называют
дискриминантной функцией
![]()
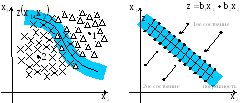
Рисунок 10.4а Рисунок 10.4б
Если считать, что при неизвестной
нелинейной границе
![]() ошибка диагностики минимальна, то
согласившись на более простую линейную
оценку
ошибка диагностики минимальна, то
согласившись на более простую линейную
оценку
![]() мы допускаем большую (но допустимую)
погрешность (Рисунок 10.4б). Рассуждая
по аналогии с одномерным случаем,
разделяющая поверхность представляет
собой плоскость, проекция которой на
плоскость
мы допускаем большую (но допустимую)
погрешность (Рисунок 10.4б). Рассуждая
по аналогии с одномерным случаем,
разделяющая поверхность представляет
собой плоскость, проекция которой на
плоскость
![]() представляет собой прямую линию
представляет собой прямую линию
![]() вокруг которой выделяют иногда некоторую
зону неопределенности, которая
определяется различными дополнительными
предположениями, в том числе ошибками
(особенно если
вокруг которой выделяют иногда некоторую
зону неопределенности, которая
определяется различными дополнительными
предположениями, в том числе ошибками
(особенно если
![]() ,
,
![]() - вычисляемые показатели, например,
характеристики косвенного контроля)
измерений.
- вычисляемые показатели, например,
характеристики косвенного контроля)
измерений.
В зависимости от вида функции
![]() различают линейную (ЛДФ) и нелинейную
(НЛДФ) дискриминантную функции, к оценке
которых мы и перейдем сначала в самом
общем виде.
различают линейную (ЛДФ) и нелинейную
(НЛДФ) дискриминантную функции, к оценке
которых мы и перейдем сначала в самом
общем виде.
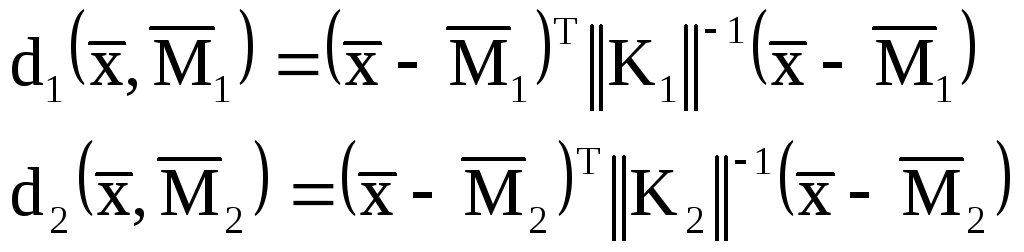
10.4.3. Многомерный случай.
Будем, как и ранее, считать, что для
распознавания двух произвольных
состояний объекта
![]() и
и
![]() в окрестности вектора измерений
в окрестности вектора измерений
![]() выполняется многомерный нормальный
закон распределения с заданными
априорными вероятностями
выполняется многомерный нормальный
закон распределения с заданными
априорными вероятностями
![]() и
и
![]() и основными статистическими
характеристиками: вектором математических
ожиданий
и основными статистическими
характеристиками: вектором математических
ожиданий
![]() и соответственно ковариационными
матрицами
и соответственно ковариационными
матрицами
![]() ,
,
![]() .
В ряде работ показано, что по критерию
минимальных средних потерь уравнение
границы областей удовлетворяет условию
(при равных ценах) (НЛДФ) квадратичная
форма:
.
В ряде работ показано, что по критерию
минимальных средних потерь уравнение
границы областей удовлетворяет условию
(при равных ценах) (НЛДФ) квадратичная
форма:

(ЛДФ) при
![]()
![]()
или иначе для ЛДФ:
Здесь
![]() - элементы обратной ковариационной
матрицы
- элементы обратной ковариационной
матрицы
![]() ,
а величина порога
,
а величина порога
![]() определяется различными предположениями
(априорные вероятности, цены, законы
распределения и их параметры).
определяется различными предположениями
(априорные вероятности, цены, законы
распределения и их параметры).
Как и ранее для одномерного случая, эти уравнения приводятся к рекуррентной форме.
Очень часто мы заранее не знаем типа
распределения и тогда достаточно часто
используется адаптивный подход: задаемся
видом функции
![]() и предъявляем обучающей системе точки
состояний
и предъявляем обучающей системе точки
состояний
![]() и
и
![]() ,
последовательно уточняя коэффициенты
,
последовательно уточняя коэффициенты
![]() .
Для случая ЛДФ в многомерном пространстве
и при нескольких диагностируемых
состояниях алгоритм описанй в [___].
.
Для случая ЛДФ в многомерном пространстве
и при нескольких диагностируемых
состояниях алгоритм описанй в [___].
Аналогично работает и процедура
классификации на базе кластер-анализа.
При этом необходимо задаться мерами
расстояний текущих значений точки
![]() от центра кластеров
от центра кластеров
![]() и
и
![]() соответственно. Сравнивая каждый раз
соответствующие
соответственно. Сравнивая каждый раз
соответствующие
![]() между собой, мы принимаем решение в
пользу того состояния, для которого
между собой, мы принимаем решение в
пользу того состояния, для которого
![]() меньше. Заметим, что уравнение границы
между состояниями остается неизвестным.
Из всех используемых мер расстояний
(евклидова мера, взвешенное евклидово
расстояние, степенное расстояние (мера
Минковского) и др.) наиболее точные
результаты классификации получают
использованием меры, называемой
расстоянием Махаланобиса, которое
наилучшим образом приближает равноудаленную
точку и сводит процент ошибочных
классификаций к минимуму [___]:
меньше. Заметим, что уравнение границы
между состояниями остается неизвестным.
Из всех используемых мер расстояний
(евклидова мера, взвешенное евклидово
расстояние, степенное расстояние (мера
Минковского) и др.) наиболее точные
результаты классификации получают
использованием меры, называемой
расстоянием Махаланобиса, которое
наилучшим образом приближает равноудаленную
точку и сводит процент ошибочных
классификаций к минимуму [___]:
Необходимость на каждом шаге вычислять
![]() значительно сложнее, чем определять
знак
значительно сложнее, чем определять
знак
![]() .
.
Вернемся теперь к двумерному случаю.
В работе [__]
показано, что для многомерного нормального
закона распределения в пространстве
двух параметров
![]() и
и
![]() может быть аналитически получена функция
формы НЛДФ (
может быть аналитически получена функция
формы НЛДФ (![]() )
от знака которой зависит искомый вид
разделяющей кривой
)
от знака которой зависит искомый вид
разделяющей кривой
![]() для двух состояний 1
для двух состояний 1![]() и 2
и 2![]() :
:
 ;
;
Здесь сделано предположение равенства
коэффициента корреляции
![]() в обоих состояниях (1, 2).
в обоих состояниях (1, 2).
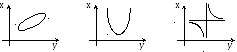
Вид НЛДФ зависит от знака
![]() :
:
![]() ,
форма НЛДФ есть эллипс
,
форма НЛДФ есть эллипс
![]() ,
форма НЛДФ – парабола
,
форма НЛДФ – парабола
![]() ,
форма НЛДФ – гипербола.
,
форма НЛДФ – гипербола.
Заметим, что при изменении R
в диапазоне (0,1) парабола имеет место
лишь в точке
![]() для которой
для которой
![]() ,
во всех остальных случаях разделяющая
кривая либо эллипс, либо гипербола.
Случай линейной границы (ЛДФ) соответствует
при этом
,
во всех остальных случаях разделяющая
кривая либо эллипс, либо гипербола.
Случай линейной границы (ЛДФ) соответствует
при этом
![]() независимо от изменения R во всем
диапазоне (от 0 до 1) возможных значений
коэффициентов корреляции при одинаковых
дисперсиях.
независимо от изменения R во всем
диапазоне (от 0 до 1) возможных значений
коэффициентов корреляции при одинаковых
дисперсиях.
Примеры определения границ разделяющих поверхностей прямым построением кривых распределения вероятностей приведены ниже на ряде иллюстративных рисунков.
Различные адаптивные процедуры
классификации и построения
![]() при неизвестных законах распределения
и неточных значениях параметров
рассмотрены в [____].
В многомерных случаях наилучшие
результаты получены при кусочно-линейной
аппроксимации исходной НЛДФ.
при неизвестных законах распределения
и неточных значениях параметров
рассмотрены в [____].
В многомерных случаях наилучшие
результаты получены при кусочно-линейной
аппроксимации исходной НЛДФ.