

9.4. Альтернативность и модульность
Аналогичным образом могут быть проанализированы и другие функции информационных подсистем:
– контроль состояния и диагностика работоспособности оборудования;
– косвенное измерение, определение неизмеряемых показателей работы оборудования;
– интегрирование расходов перерабатываемых материалов и/или энергетических затрат;
– определение скорости изменения параметров (обычно это необходимо для управляемых величин);
– подготовка данных для управления и вышестоящих систем (включая визуализацию для принятия решения оператором).
Часть из них будет более подробно рассмотрена ниже. Однако принципиально соблюдается подход, сформулированный ранее: одна и та же функция будет реализовываться несколькими алгоритмами (методами, моделями), выбор из возможного множества альтернатив осуществляется с учетом специфики управляемого объекта и технических возможностей вычислительной системы.
9.5. Типовые дискретные модули
Вместе с тем, могут быть выделены некоторые типовые модели и алгоритмы, которые из условий практической реализации используются наиболее часто, чтобы ввести их в состав общего программного обеспечения любой ИУС как обязательные. Такие типовые модули в программном обеспечении помогают наиболее быстро осуществить настройку системы, а специфические особенности ИУВС учесть через процедуры построения модулей, которые войдут в состав специального математического и программного обеспечения – СпМО.
Легко видеть, что типовые математические операции в уже рассмотренных задачах этой и предыдущих глав следующие:
– линейные преобразования:
![]()
– накопленные суммы:
![]()
– приращения на интервале измерения:
![]()
– сравнение с порогом:
![]()
– запоминание текущих и вычисленных оценок на нескольких интервалах времени:
– взвешенные суммы:
![]() ;
; ![]()
– векторные преобразования алгебраического типа:
![]() и
операции обращения матриц
и
операции обращения матриц
![]()
– линейные дифференциальные уравнения:

Все эти типовые модули ОМО должны быть соответствующим образом оформлены, чтобы обеспечить удобство их настройки по входным и выходным параметрам.
Существенно при этом для «больших» систем соблюдать принцип избирательности обработки информационных потоков, основной смысл которого заключается в том, что в зависимости от смысла и назначения, каждый сигнал обрабатывается не во всех, а только в части модулей обработки, т.е. имеет свой маршрут, который при компоновке и настройке системы может быть задан своим графом, или в общем случае матрицей связей типовых модулей.
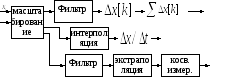
Так например, рассмотренная функциональная схема предварительной обработки информации
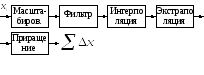
используется не для всех
![]() общего вектора измерений
общего вектора измерений
![]() ,
а только для их части, например:
,
а только для их части, например:

![]()
![]()
Возможны и более сложные маршруты обработки информационных сигналов (линейные, разветвляющиеся, суммирующееся и т.д.)
Задание таких маршрутов осуществляется не только в пространстве, но и во времени, особенно в системах реального времени.
Глава 10. Диагностические поДсистемы
10.1. Аварийная защита
Ранее, на этапе предварительной обработки
информации была выделена одна из операций
– контроль измеряемых параметров,
который заключается в том, что текущее
значение
![]() сравнивается с некоторым допустимым
значением. При этом для формирования
дальнейшего принятия решений используются
два вида сообщений (оба или один из них)
и соответствующих алгоритмов: нарушение
допустимого уровня и/или нарушение
знака отклонений от заданного предела.
сравнивается с некоторым допустимым
значением. При этом для формирования
дальнейшего принятия решений используются
два вида сообщений (оба или один из них)
и соответствующих алгоритмов: нарушение
допустимого уровня и/или нарушение
знака отклонений от заданного предела.
1. Алгоритмы контроля уровня (амплитудные алгоритмы)
Все измерения
![]() считаются независимыми. Для начала
необходимо задать минимальное или
максимальное допустимое отклонение
каждого параметра от нормального
(среднего) значения.
считаются независимыми. Для начала
необходимо задать минимальное или
максимальное допустимое отклонение
каждого параметра от нормального
(среднего) значения.
с дальнейшим вычислением разностей
Если эти отклонения не превышают по
модулю допустимого значения
![]() и/или
и/или
![]() ,
то изменение параметров считается
допустимыми и не требуют немедленного
(оперативного) управления. Заметим:
в общем случае
,
то изменение параметров считается
допустимыми и не требуют немедленного
(оперативного) управления. Заметим:
в общем случае
![]() и в зависимости от физического смысла
анализируются либо оба допустимых
предела изменений параметра, либо только
одни из них.
и в зависимости от физического смысла
анализируются либо оба допустимых
предела изменений параметра, либо только
одни из них.
В свою очередь, допустимые пороговые
значения (![]() )
могут быть заданными двумя способами:
)
могут быть заданными двумя способами:
1а) постоянство уровней и траекторий
движения системы: ![]() ;
;![]()
1б) изменение допустимых уровней во времени
![]() ;
;
![]()
Такая ситуация имеет место в процессах пуска или останова агрегатов; набора высоты и снижения мобильного объекта по заданной траектории и т.д. Этот случай является более сложным, как по вычислительным, так и по аппаратным затратам, поэтому используется значительно реже, только для особо опасных объектов и режимов с существенной оговоркой -"возможен ручной режим".
2. Знаковый метод контроля.
Он очень близок к первому методу контроля
(по уровню). Отличие заключается в том,
что при диагностике и выработке
управляющих воздействий на объект,
учитываются в первую очередь знаки
вычисляемых отклонений текущих значений
параметров
![]() от предельных (
от предельных (![]() ),
т.е.
),
т.е.
![]() либо
либо
![]() .
.
Как уровень, так и знак отклонения от предельных значений используются в системах аварийной блокировки (защиты). При этом используется сравнительно небольшое количество параметров объекта, которые необходимо жестко контролировать (либо по уровню, либо по знаку), чтобы избежать аварийной ситуации. Такое управление требует немедленных, оперативных действий и алгоритм включения/отключения необходимых управлений должен быть предельно простым, например
{если
![]() ,
то
,
то
![]() }
или
}
или
{если
![]() ,
то
,
то
![]() }
}
При использовании нескольких сигналов i=1… m, правило аварийного управления записывают либо одновременно (логическое «и») для всех аварийных параметров (и соответственно аварийных управлений)
{<если
![]() и если
и если
![]() …
и если
…
и если
![]() > то
> то
<![]() ;
;
![]() ;…;
;…;![]() >}
>}
либо при нарушении ограничений хотя бы по одному из них (логический оператор ИЛИ). Именно так и работают многие системы аварийной защиты. Например, система автоматической аварийной защиты атомного реактора на АЭС, которая разделяется на логические блоки быстрой аварийной защиты (БАЗ) и медленной аварийной защиты (МАЗ), работает соответственно в двух режимах управления: по сигналу логического блока БАЗ стержни аварийной защиты быстро сбрасываются в активную зону, а по сигналу МАЗ – вводятся в активную зону с определенной скоростью. Сигнал БАЗ формируется при появлении одной из ситуаций: уменьшение времени удвоения мощности до 20с; уменьшение расхода теплоносителя более чем на 20% от заданного значения; отказах (двух каналов контроля отклонений мощности; двух из трех однотипных каналов контроля мощности и времени удвоения, двух из трех расходомеров суммарного расхода теплоносителя через реактор) в системе измерения; появления аварийного сигнала из систем технологического контроля. Сигнал МАЗ формируется при появлении одной из ситуаций: выходе из строя двух регуляторов (резервного и основного); превышение мощности более чем на 15% от заданного значения, уменьшение расхода теплоносителя на 15% установленного значения.
Таким образом, в общем случае аварийное
управление реализуется как некоторая
(обычно логическая) функция от малого
числа (3![]() контролируемых по знаку либо по модулю
параметров:
контролируемых по знаку либо по модулю
параметров:
Здесь i,j,k – конечны и необязательно равны между собой, при соблюдении указанного ограничения на число параметров
![]() .
.
3. Метод, использующий мажоритарное правило.
При увеличении числа параметров, скажем,
когда их количество приближается к 30,
для упрощения Алгоритма противоаварийной
защиты используется МАЖОРИТАРНОЕ
ПРАВИЛО. Заключается оно в том, что
каждой комбинации управлений (![]() )
присваивается следующее правило
согласования:
)
присваивается следующее правило
согласования:

Заметим, что неявно оно уже появилось в рассмотренном примере: отказы в измерительной системе БАЗ атомного реактора