

Часть 3. Анализ процессов в замкнутой сар
Анализ процессов в замкнутой САР будем производить на примере устойчивого объекта снабженного ПИ-регулятором. Данная задача решается аналогично для нейтрального объекта и для системы, снабженной ПИД-регулятором.
1.
Для проверки адекватности расчета
настроек на модели и на заданном объекте
построим линию Д-разбиения. Для модели
это можно выполнить в пакете Mathcad,
положив, что на границе устойчивости
ψ=100%, а корневая степень колебательности
m=0.
Для случая заданного объекта создадим
S-модель,
состоящую из объекта и регулятора,
включенного в обратную связь. Регулятор,
как готовый блок будем использовать из
раздела библиотеки Simulink
Extras/Additional
linear.
Изменяя настройки регулятора (коэффициента
![]() при заданном значении
при заданном значении
![]() ),
будем искать такие значения, которые
отвечают выходу системы на границу
колебательной устойчивости. Найденные
значения занесем в таблицу, и совместим
с построенным ранее графиком линии
Д-разбиения на модели. Данная процедура
представлена в виде листинга фрагмента
Mathcad-документа
(рис.8).
),
будем искать такие значения, которые
отвечают выходу системы на границу
колебательной устойчивости. Найденные
значения занесем в таблицу, и совместим
с построенным ранее графиком линии
Д-разбиения на модели. Данная процедура
представлена в виде листинга фрагмента
Mathcad-документа
(рис.8).
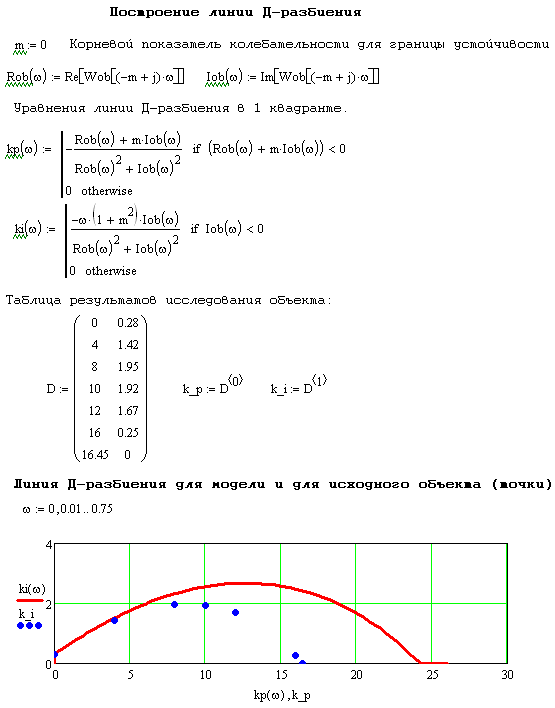
Рис. 8
2. Построим диаграмму Боде (для уточненной модели и регулятора, настроенного частотным методом) и найдем запасы устойчивости системы для проверки ее робастности системы.
3. Построим график АЧХ замкнутой системы (для уточненной модели и регулятора, настроенного частотным методом) и определим показатель колебательности.
4.
Исследуем переходные процессы в замкнутой
системе, состоящей из объекта и регулятора,
настроенного частотным методом и одним
из инженерных методов. Анализируя
графики переходного процесса, можно
найти основные прямые показатели
качества (максимальное отклонение,
перерегулирование, колебательность и
время процесса). Также, только для
устойчивых
объектов, следует вычислить динамический
коэффициент регулирования
![]() .
Этот коэффициент характеризует
эффективность подавления регулятором
возмущений и показывает, во сколько раз
отличаются максимальные отклонения
регулируемой величины от исходного
значения при наличии в обратной связи
регулятора и при его отсутствии.
Результаты оценок следует свести в
таблицу. Сделайте вывод.
.
Этот коэффициент характеризует
эффективность подавления регулятором
возмущений и показывает, во сколько раз
отличаются максимальные отклонения
регулируемой величины от исходного
значения при наличии в обратной связи
регулятора и при его отсутствии.
Результаты оценок следует свести в
таблицу. Сделайте вывод.
5. Введите в канал управления (для настроек регулятора частотным методом) нелинейный элемент типа насыщение и выясните, в каком диапазоне должна изменяться величина входного воздействия для того, чтобы:
-
нелинейный элемент оказывал незначительное влияние на качество управления;
-
наличие нелинейного элемента заметно сказывалось на величине перерегулирования, максимального динамического отклонения, времени процесса;
-
после окончания процесса сохранялось статическое отклонение, связанное с нехваткой ресурсов управляющего воздействия.
6. В последнее время на практике широкое распространение получили цифровые устройства обработки информации. Они заменяют традиционные аналоговые электронные устройства во многих отраслях хозяйственной деятельности. Основой их повсеместного внедрения является такие показатели качества как надежность, универсальность, простота настройки и модернизации. Цифровой сигнал имеет наибольшую помехозащищенность, для него отсутствует дрейф параметров элемента, он удобен для обработки с применением аппарата булевой алгебры. Алгоритм преобразования цифрового сигнала обычно заложен в памяти цифрового устройства, поэтому может быть легко изменен. В цифровой форме можно реализовать сложные законы управления
В то же время между моментами квантования (моментами съема измеряемых сигналов и выдачи нового управляющего воздействия) система ведет себя как разомкнутая (неуправляемая). Это может привести к потере устойчивости (при больших интервалах квантования в сравнении с постоянной времени объекта) и скрытым колебаниям (колебаниям непрерывного сигнала, которые не проявляются в моменты квантования).
Из сказанного следует, что цифровые устройства являются неотъемлемой составляющей современных технических средств, поэтому целесообразно рассмотреть возможность цифровой реализации регулятора в исследуемой САР.
Для построения дискретной модели ПД-регулятора используется преобразование Тастина:
![]() ,
(17а)
,
(17а)
соответствующее интегрированию по методу трапеций.
Для построения дискретной передаточной функции интегрального канала применяется метод интегрирования Эйлера (метод прямоугольников), т.е., замена:
![]() .
(17б)
.
(17б)
Период квантования сигнала Т с одной стороны не должен быть очень большим, поскольку это ведет к ухудшению качества и потери устойчивости системой, а с другой стороны не должен быть очень маленьким, поскольку это ведет к неоправданной нагрузке на микропроцессор управляющего устройства, что связано с увеличением числа расчетов в единицу времени. В первом приближении период квантования можно оценить по формуле:
![]() ,
(18)
,
(18)
где
![]() – частота среза, определяемая по
диаграмме Боде разомкнутой системы с
расчетом регулятора по уточненным
формулам. В нашем примере
– частота среза, определяемая по
диаграмме Боде разомкнутой системы с
расчетом регулятора по уточненным
формулам. В нашем примере
![]() =0,32 рад/с.
Поэтому
=0,32 рад/с.
Поэтому
![]() .
.
Произведите расчет по формулам (17) с учетом (18) вручную и сравните с результатом, получаемым с использованием возможностей пакета компьютерной математики Matlab (приложение CST). Листинг команд будет иметь вид:
Аналогичный результат может быть получен альтернативным путем с применением команды c2d по преобразованию непрерывной передаточной функции регулятора в дискретную. Листинг соответствующих команд имеет вид:
> clear all
>> Kp=14.98; Ti=5.57; Td=1.11;% Параметры передаточной функции непрерывного регулятора
>> T=0.63; % Период квантования
>> W1d=c2d(tf([Td 1],1),T,'tustin');W2d=c2d(tf(1,[Ti 0]),T,'zoh');
>> % Процедуры дискретного переоборудования регуляторов
>> Wd=Kp*(W1d+W2d)
Transfer function:
67.77 z^2 - 103.9 z + 39.5
--------------------------
z^2 - 1
Sampling time: 0.63
Составьте S-модель замкнутой системы с дискретным и аналоговым регуляторами и проанализируйте переходные процессы. Выясните как изменяется качество дискретной системы при изменении периода квантования.