

Часть 2. Расчет и оптимизация настроек непрерывного регулятора
Унифицированные промышленные регуляторы обычно позволяют осуществлять ПИД-регулирование и содержат усилитель, дифференциатор и интегратор. Обнаружив на входе рассогласование, усилитель регулятора обеспечивает возрастание управляющего воздействия, компенсируя значительную часть рассогласования, затем интегратор медленно, чтобы не “проскочить” желаемую точку, приближает регулируемый параметр к заданному значению. Дифференциатор форсирует работу исполнительного механизма при возрастании отклонения параметра, а при уменьшении отклонения, соответственно, тормозит.
В настоящей работе предлагается проанализировать работу астатической системы автоматического регулирования. Для обеспечения астатизма выбирается регулятор, включающий И-закон, а для улучшения динамических характеристик системы он, кроме того, должен дополнительно включать П-закон или, в случае повышенных требований к динамике системы – ПД-закон.
Соответственно передаточная функция регулятора будет записываться в виде следующего выражения для ПИ-регулятора:
 ,
(8а)
,
(8а)
или в виде следующего выражения для ПИД-регулятора:
 .
(8б)
.
(8б)
Настроечными
параметрами регулятора являются –
коэффициент усиления
![]() ,
время интегрирования (или время изодрома)
,
время интегрирования (или время изодрома)
![]() и время дифференцирования (или время
предварения
и время дифференцирования (или время
предварения
![]() ).
).
Существуют различные критерии, в соответствии с которыми производится оптимизация настроек регулятора без изменения его структуры (параметрический синтез) и различные методики поиска этих настроек.
В
настоящей работе ограничимся
поиском настроек, минимизирующих
интегральный квадратичный критерий
качества
![]() ,
т.е. фактически обеспечивающих максимальную
точность в динамическом режиме. Заметим,
что поиск абсолютного минимума
,
т.е. фактически обеспечивающих максимальную
точность в динамическом режиме. Заметим,
что поиск абсолютного минимума
![]() обычно приводит к высокой колебательности
в переходном процессе, поэтому обычно
производится поиск настроек для
обеспечения минимума при некоторых
дополнительных ограничениях.
обычно приводит к высокой колебательности
в переходном процессе, поэтому обычно
производится поиск настроек для
обеспечения минимума при некоторых
дополнительных ограничениях.
Для поиска настроек часто используются инженерные методы синтеза, среди которых можно выделить:
– метод вычисления настроек по формулам – метод Копеловича;
– метод вычисления настроек по номограммам – метод Клюева - Копеловича;
– эмпирический метод Циглера - Никольса.
В методах Копеловича и Клюева-Копеловича используется выражение для приближенной аппроксимации разгонной характеристики и передаточная функция объекта представляется формулами (3). Кроме того возмущения считаются ступенчатыми и приведенными к каналу регулирования.
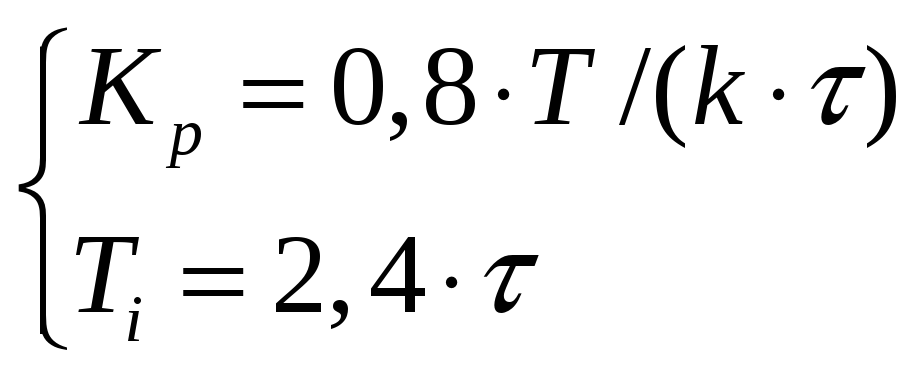
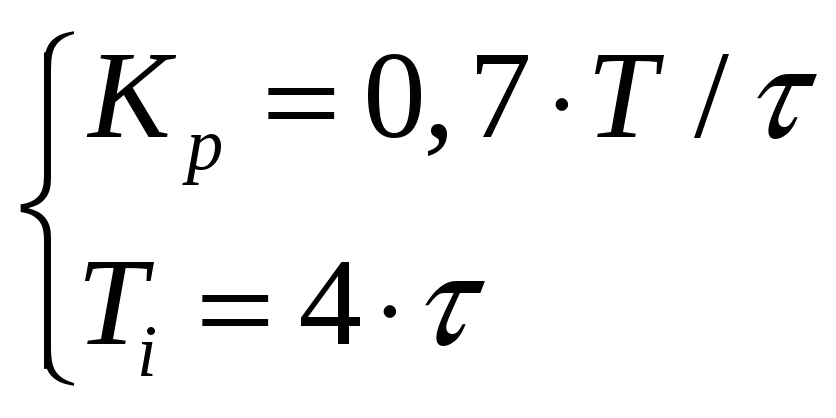
1. При вычислении настроек по формулам предполагается, что переходной процесс в системе является колебательным с 20% забросом и величиной колебательности 5–15%. Формулы для расчета настроек сведены в табл. 1.
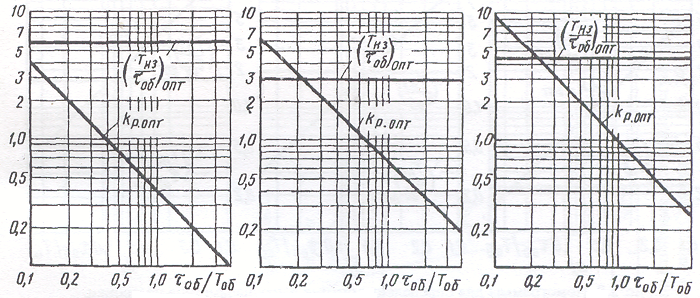
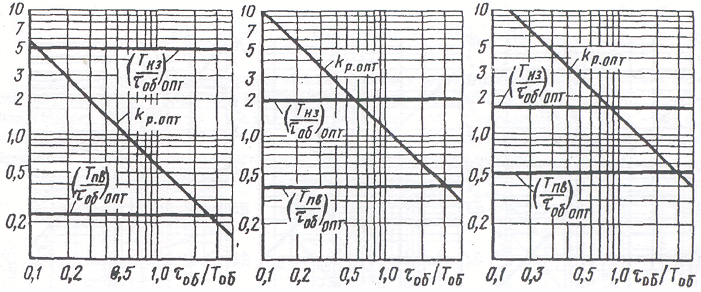
2. При использовании метода номограмм Клюева-Копеловича выбор настроек производится в зависимости от величины отношения τ/Т и требуемого значения величины колебательности переходного процесса. Эти номограммы приведены на рис. 3 – 6. Значение колебательности в переходном процессе для представленных графиков (слева – направо) составляет 0-5%, 5-15%, 15-25%. Для параметров Ti, Td используются обозначения Тиз (изодрома) и Тпв (предварения).
Табл. 1. Формулы для расчета настроечных параметров регулятора
|
Тип регулятора |
Тип объекта |
|
|
Устойчивый |
Нейтральный |
|
|
ПИ |
|
|
|
ПИД |
|
|
3. Эмпирический метод определения настроек регулятора Циглера-Никольса, в отличие от рассмотренных выше не требует знания параметров передаточной функции объекта. Он заключается в следующем:
Регулятор переводится в П-алгоритм регулирования (отключаются И- и Д-компоненты), а далее путем последовательного увеличения kр, с одновременной подачей ступенчатого изменения входной величины, добиваются выведения системы на границу колебательной устойчивости. Фиксируются значения критического коэффициента усиления регулятора и периода критических колебаний в системе Tкол. и рассчитываются оптимальные параметры настройки регулятора:
|
|
(9) |
Инженерные методы настроек регулятора, расчеты в которых основаны на приближенной модели объекта, имеют узкую область применения, ограниченную одноконтурными системами, в то время как методы расчета по частотным характеристикам объекта являются основой для построения методов расчета реально применяемых сложных систем регулирования, и, позволяют учитывать статистические характеристики случайных шумов.
|
Рис. 3. Номограммы для определения оптимальных параметров настройки ПИ-регулятора устойчивого объекта. |
|
Рис. 4. Номограммы для определения оптимальных параметров настройки ПИ-регулятора нейтрального объекта. |

|
Рис. 5. Номограммы для определения оптимальных параметров настройки ПИД-регулятора устойчивого объекта. |
|
Рис. 6. Номограммы для определения оптимальных параметров настройки ПИД-регулятора нейтрального объекта. |

Более адекватные расчеты настроек регулятора, основанные на уточненной модели объекта, проводятся с помощью т.н. частотного метода расчета регулятора. Остановимся на сути этого метода.
Для того чтобы система являлась робастной, т.е. обладала определенным запасом устойчивости и, тем самым, оставалась работоспособной при изменении условий функционирования следует ограничить возможный диапазон изменения параметров регулятора. Этого можно добиться, вводя ограничения на область расположения корней характеристического уравнения замкнутой системы в плоскости корней, т.е. на величину корневой степени колебательности m.
В одноконтурных системах регулирования чаще всего оправдывается гипотеза наличия доминирующей пары корней, вносящей наибольший вклад в формирование переходного процесса. Взаимосвязь колебательности ψ и корневого показателя колебательности m задается формулой:
|
|
(10) |
Для того, чтобы величина корневой степени колебательности замкнутой системы регулирования принимала заданное значение необходимо и достаточно чтобы выполнялся расширенный критерий Найквиста, т.е. расширенная КЧХ (РКЧХ) разомкнутой системы должна проходить через критическую точку плоскости (–1, j0). РКЧХ отличается от КЧХ тем, что в передаточной функции выполнена замена переменной:
![]() ,
,
т.е. выполняется условие:
|
|
(11) |
Если ввести обозначения для РКЧХ объекта и регулятора в виде:
|
|
(12а) |
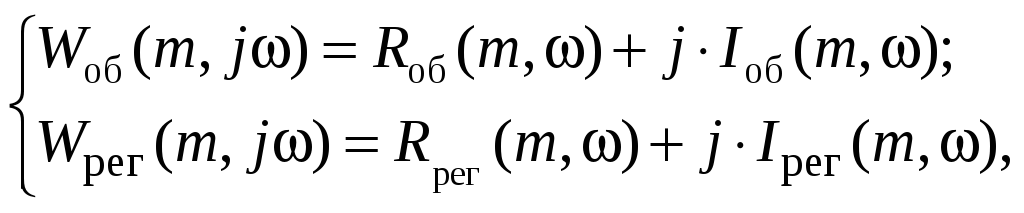
где обозначено:
 ,
(12б)
,
(12б)
то подстановка (12) в (11) приведет к преобразованию этого соотношения в систему двух линейных уравнений:
|
|
(13) |

В определенном частотном диапазоне каждому значению частоты отвечает пара значений настроечных параметров, которые являются решениями системы уравнений (13). Для этих значений настроечных параметров доминирующая пара корней характеристического уравнения расположена на ограничивающих лучах (но в различных их точках!) и, следовательно, заданная величина степени колебательности m обеспечена. Из этого набора решений и следует выбирать те, которые минимизируют квадратичный интегральный критерий качества.
В случае ПИ-алгоритма работы регулятора решение системы (13) имеет вид:
|
|
(14) |

Здесь
под настроечным параметром
![]() понимают отношение
понимают отношение
![]() .
.
Варьируя
значение параметра ω можно получить на
плоскости настроечных параметров (![]() )
линию равных значений параметра m,
называемую
линией равной степени колебательности
(ЛРК). Минимуму
квадратичного интегрального критерия
I2
(совместно с ограничением по значению
m)
соответствует точка справа от вершины
графика на участке со значениями
ki=(0,8÷0,9)ki
max.
Для нахождения этой точки следует
построить зависимость параметра
)
линию равных значений параметра m,
называемую
линией равной степени колебательности
(ЛРК). Минимуму
квадратичного интегрального критерия
I2
(совместно с ограничением по значению
m)
соответствует точка справа от вершины
графика на участке со значениями
ki=(0,8÷0,9)ki
max.
Для нахождения этой точки следует
построить зависимость параметра
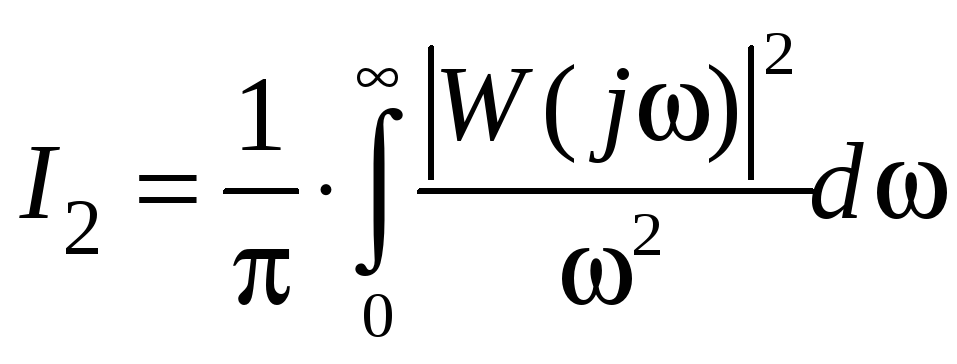
![]() от положения на ЛРК воспользовавшись
формулой Парсеваля:
от положения на ЛРК воспользовавшись
формулой Парсеваля:
|
|
(15) |
 .
.
где
![]() – КЧХ замкнутой системы. В нашем случае
соотношение (15) примет вид:
– КЧХ замкнутой системы. В нашем случае
соотношение (15) примет вид:
|
|
(15а) |
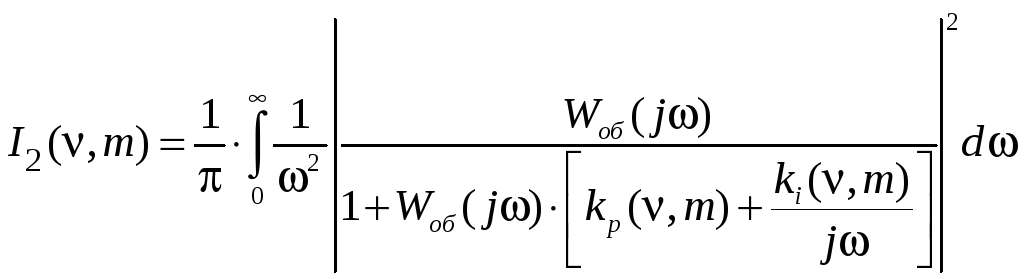 .
.
Особенностью
настройки регулятора с ПИД-алгоритмом
регулирования является то, что определению
подлежат не два, а три
настроечных параметра. Вместе с тем,
использование расширенного критерия
Найквиста предполагает расчет настроек
как результат решения системы двух
линейных уравнений, т.е. может быть
использовано для расчета двух
настроечных параметров. Это затруднение
обходится путем ввода условия неизменности
отношения постоянной дифференцирования
Td
к постоянной
интегрирования Тi:
![]() .
При этом величина α составляет ~(0,20,3).
.
При этом величина α составляет ~(0,20,3).
Тогда выражение для РКЧХ регулятора приобретает вид:
|
|
 .
.
В этом случае решение уравнений (13) также может быть найдено в виде аналитических соотношений для записи которых следует предварительно определить вспомогательные выражения:

Окончательно уравнения ЛРК в параметрической форме можно записать так:
|
|
(16) |
 .
.
При расчете линии m=const следует как в случае ПИ, так и в случае ПИД-регулятора, предусмотреть положительность настроечных параметров.
Далее, аналогично случаю ПИ-регулятора ищутся настройки, которые отвечают минимуму квадратичного ИКК.
Расчеты по формулам (14) – (16) удобно выполнять используя возможности пакета компьютерной математики Mathcad. Принципиальные отличия в алгоритмах расчета оптимальных настроек для нейтрального и устойчивого объектов нет. Поэтому ниже, в качестве примера, приведен вариант расчета настроек ПИ-регулятора для устойчивого объекта в виде листинга Mathcad документа (рис.7), снабженного комментариями.
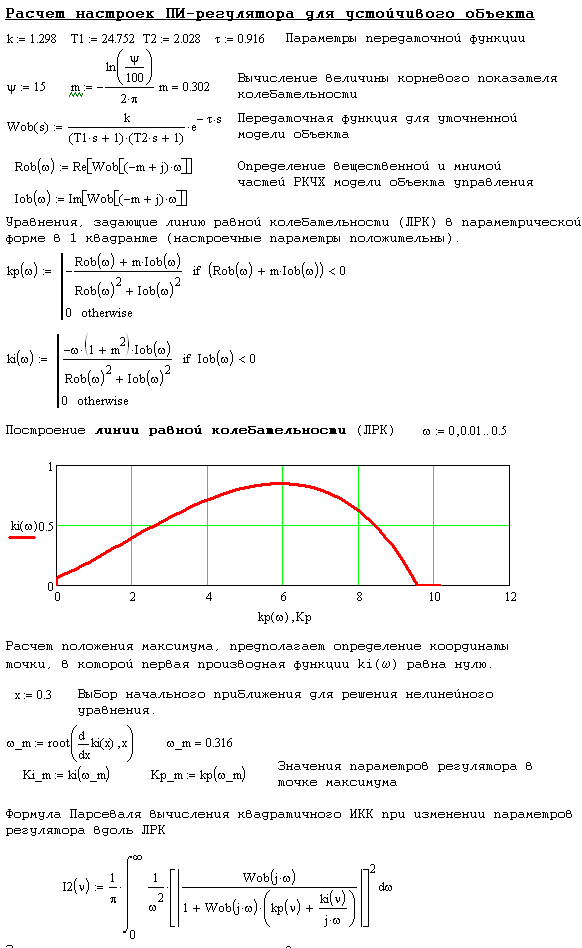
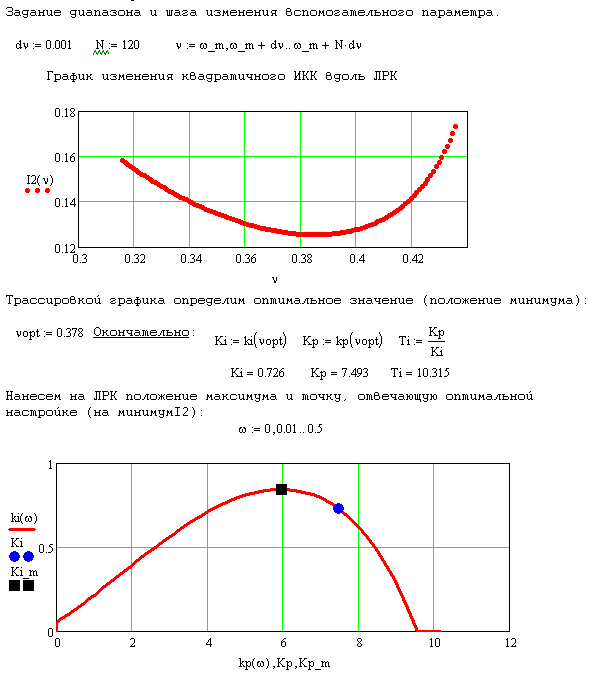
Рис.7