

Чувствительность датчика
Это определяющий параметр при выборе датчика. Он определяется в области номинальных параметров как отношение изменения сигнала ∆S к соответствующему изменению измеряемой величины “m”
![]()
Эта характеристика определяется изготовителем датчика и позволяет оценить выходной сигнал, зная пределы изменения измеряемой величины, т.е. сделать выбор датчика для измерительной системы в соответствии с требованиями измерений.
Размерность «S» зависит от принципа работы датчика и природы измеряемой величины:
Ом/0С для терморезистора, мкВ/0С – для термопары (см. Вт-1 Гц1/2 для обнаружительной способности фотоприемника.
Чувствительность датчика зависит от:
-
физического принципа, лежащего в основе его работы;
-
выбора материала датчика;
-
размера датчика (часто);
-
устройства датчика;
-
измерительной схемы;
-
температуры окружающей среды;
-
величины или частоты напряжения питания;
-
частоты изменения измеряемых величин.
При зависимости от величины напряжения питания;
S (U п.) = S1Uп∆S/∆m.
В этом случае указывается значение чувствительности на 1 В напряжения питания.
Для датчиков, содержащих полупроводниковые элементы большое влияние на чувствительность оказывает температура. Поэтому, определяя чувствительность таких датчиков всегда указывают температуру при которой проведено измерение и коэффициент изменения чувствительности от температуры (коэффициент преобразования).
Для термотранзистора AGP коэффициент преобразования К = 156 при 24 0С, а dK/dT = -2,3∙10-3/ 0С.
Для PbS ∆E = 0,4 эВ при 295 и dЕ/dT = 4,5∙10-4 эВ/К.
Большое влияние на чувствительность оказывает частота изменения измерительной величины (чем > f, тем > может быть влияние). Это связано обычно с механической, тепловой и электрической инерцией датчика или устройства связанного с ним, которое мешает мгновенному следованию сигнала за измеряемой величиной. Наиболее часто это связано с элементами электрической схемы (R, C, L), в которых происходят переходные процессы. Причинами могут быть физические принципы работы датчика.
В зависимости от частоты изменения “m” различают статический режим работы и динамический.
В первом случае “m” изменяется медленно, или оно постоянно (поток излучения, ускорение).
Во втором случае “m” изменяется быстро (модулируемый поток излучения, ускорение, связанное с вибрациями).
Некоторые датчики могут работать только в динамичном режиме (микрофон, пироэлектрический датчик).
Чувствительность в статическом режиме определяется по наклону статической характеристики в рабочем диапазоне.
Это связано обычно с механической, тепловой и электрической инерцией датчика или устройства, связанного с ним, которая мешает мгновенному следованию сигнала за измеряемой величиной. Наиболее часто это связано с такими элементами электрической схемы, как резисторы, конденсаторы, катушки индуктивности, в которых происходят переходные процессы. Причинами могут быть и физические принципы работы датчиков.
Если эти процессы не постоянны, то чувствительность будет зависеть от рабочего диапазона. На линейном участке зависимости отношение S/m = Rj называется статическим коэффициентом преобразования.
Динамичная чувствительность определяется, если “m” является периодической функцией времени. В этом случае S будет иметь ту же периодичность, что и “m”. Зависимость чувствительности в динамичном режиме от частоты изменения измеряемой величины, является частотной характеристикой датчика.
При f → 0 чувствительность в динамичном режиме стремится к значению статической чувствительности.
Если измеряемая величина описывается выражением
m(t) = m0 + m1 cos t,
где m0 – постоянная составляющая, на которую накладывается синусоидальная переменная с амплитудой m1 и частотой f = /2π, то выходной сигнал приобретает форму:
S (t) = S0 + S1 cos (t + φ),
где S1 амплитуда переменной составляющей выходного сигнала, возникающая от изменения измеряемой величины.
φ – сдвиг фаз между изменениями S на входе и выходе.
Связь между “S” и “m” в общей форме представляет собой дифференциальное уравнение, которое в зависимости от конкретного случая может быть уравнением 1ого или 2ого порядка.
Зависимость S = f(t) называется амплитудно - частотной характеристикой (АЧХ).
Для систем 1ого
порядка
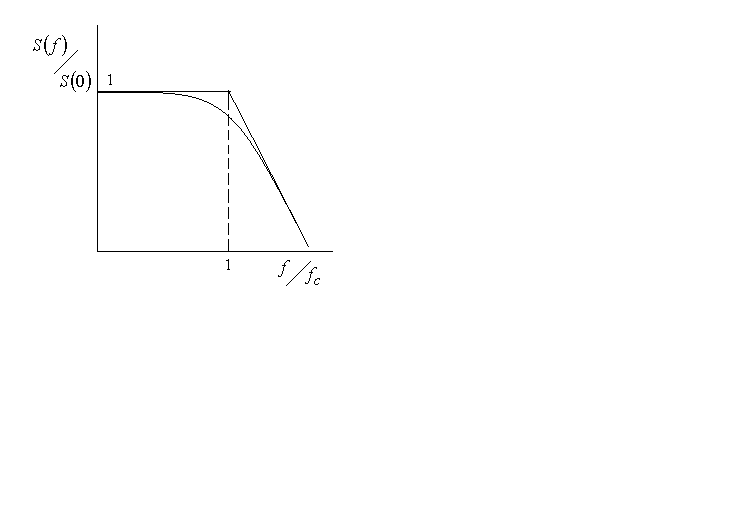
![]() при f
→ 0, Sf
= S0,
тоже при f<<fc.
Если f
= fc,
то
при f
→ 0, Sf
= S0,
тоже при f<<fc.
Если f
= fc,
то
![]() .
.
fc = B – называется полосой пропускания. Это диапазон частот, в котором ордината частотной характеристики уменьшается относительно своего максимального значения не больше, чем в 2 раза или на 3 дБ. Единица измерения 1 дБ это 0,1 десятичного логарифма отношения мощностей сигнала звуковой или электромагнитной природы. 3 дБ – это соответственно Sf/S0 = 0,3 (log2 = 0,3).
Т.е. для систем первого порядка полоса пропускания B равна fc, где fc – некая граничная частота.
Системами 2ого порядка моделируются многие комбинированные датчики.