

2. Кинематика
Кинематика изучает движение тел с геометрической точки зрения, связь между движением и движущими силами не рассматривается.
Любое тело можно представить состоящим из бесконечно большого количества бесконечно малых тел - точек. Каждая из точек тела в общем случае совершает различные движения. Поэтому изучению движения тела должно предшествовать изучение движения точки.
2.1. Кинематика точки
Непрерывную кривую, которую описывает точка в своем движении, называют траекторией точки. Если траектория точки является прямой линией, то движение точки называют прямолинейным. Если же траектория — кривая линия (не обязательно плоская), то движение точки называется криволинейным.
Движение точки по отношению к выбранной системе координат считается заданным, если известен способ, при помощи которого можно определить положение точки в любой момент времени.
В теоретической механике используются три основных способа задания движения точки: векторный, координатный и естественный.
При
векторном способе положение точки в
пространстве определяется радиус-вектором
![]() ,
проводимым из какого-либо заданного
центра
(рис. 2.1). Таким образом, траектория
движения точки является геометрическим
местом концов радиус-вектора
,
проводимым из какого-либо заданного
центра
(рис. 2.1). Таким образом, траектория
движения точки является геометрическим
местом концов радиус-вектора
![]() движущейся точки. Равенство
движущейся точки. Равенство
![]() =
=
![]() называют законом
или уравнением движения точки в векторной
форме
называют законом
или уравнением движения точки в векторной
форме
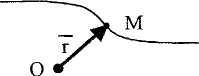
Рис. 2.1
Векторный способ задания движения используется в основном при теоретических выкладках, так как он значительно упрощает многие выводы и иногда подчеркивает физическую сущность явлений. Следует, однако, иметь в виду, что задать вектор как функцию времени, значит уметь находить его модуль и направление в любой момент времени. Это можно сделать, если избрана какая-либо определенная система координат. При решении конкретных задач обычно переходят от векторного к координатному и естественному способам задания движения.
При координатном способе положение точки определяется координатами точки в выбранной системе координат. Наиболее часто используется прямоугольная декартова система координат Oxyz (рис. 2.2). При движении точки М ее координаты изменяются с течением времени. Следовательно, координаты x,y,z движущейся точки М являются функциями времени, та есть:
x = x(t), y = y(t), z = z(t).
Эти равенства называются законом или уравнениями движения точки в декартовых координатах.
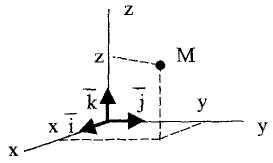
Рис. 2.2
Естественный способ задания положения и движения точки применяется в тех случаях, когда траектория движения точки заранее известна. На траектории выбирается некоторая неподвижная (относительно траектории) точка О, которая называется началом отсчета дуговой координаты (рис. 2.3). Положение движущейся точки М на траектории определяется дуговой координатой, то есть расстоянием OM=s, отложенным по траектории от начала отсчета О.
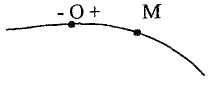
Рис. 2.3
Расстояния, отложенные в одну сторону от точки О, считают положительными, а в противоположную - отрицательными. То есть, устанавливается направление отсчета дуговой координаты.
При движении точки М расстояние s от этой точки до «неподвижной» точки О изменяется с течением времени, то есть дуговая координата s является функцией времени s=s(t). Эта равенство называется законом или уравнением движения точки в естественной форме.
Скорость
— это векторная величина, характеризующая
быстроту и направление
движения точки в
данной системе отсчета
(рис.
2.4). Направление
вектора характеризует направление
движения точки, модуль вектора - быстроту
движения. Принято вектор скорости
обозначать буквой
![]() .
Очень
важно помнить, что вектор скорости
всегда направлен по касательной
к траектории движения в данной точке.
.
Очень
важно помнить, что вектор скорости
всегда направлен по касательной
к траектории движения в данной точке.

Рис. 2.4
Размерность скорости равна единице измерения длины, деленной на единицу измерения времени. Единицы измерения могут быть м/с, см/с, км/ч и т.д. В системе СИ единица измерения скорости м/с.
При векторном способе задания движения точки скорость определяется как первая производная от радиус-вектора по времени:
![]() (2.1)
(2.1)
При координатном способе задания движения точки ее скорость определяется как вектор:
![]() (2.2)
(2.2)
где
![]() i,j,k
- единичные
векторы (орты), определяющие направление
осей координат,
Vx,Vy,Vz
- проекции
вектора скорости на координатные оси,
причем:
i,j,k
- единичные
векторы (орты), определяющие направление
осей координат,
Vx,Vy,Vz
- проекции
вектора скорости на координатные оси,
причем:
![]()
![]()
![]() (2.3)
(2.3)
где x,y,z -координаты точки М.
To есть проекции вектора скорости на координатные оси равны первым производным по времени от соответствующих координат точки. Модуль скорости определяется формулой:
![]() (2.4)
(2.4)
направляющими косинусами:
![]()
![]()
![]() (2.5)
(2.5)
При естественном способе задания движения скорость определяется формулой:
![]() (2.6)
(2.6)
где
![]() - единичный
вектор касательной к траектории в данной
точке (рис.
2.5), направленный в сторону положительного
отсчета дуговой координаты s,
- единичный
вектор касательной к траектории в данной
точке (рис.
2.5), направленный в сторону положительного
отсчета дуговой координаты s,
![]() - алгебраическое значение скорости:
- алгебраическое значение скорости:
![]() (2.7)
(2.7)
От
модуля скорости V
алгебраическая
величина отличается наличием
знака + или - . Если
![]() > О
, то вектор
> О
, то вектор
![]() направлен
в сторону положительного
отсчета дуговой координаты (
направлен
в сторону положительного
отсчета дуговой координаты (![]()
![]() );
если
);
если
![]() <0
, то в отрицательную
(
<0
, то в отрицательную
(![]()
![]() ).
Заметим, что
).
Заметим, что
|![]() |
= |
|
= |![]() |.
|.
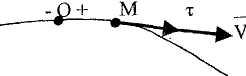
Рис. 2.5
При
неравномерном движении точки по
траектории изменяются модуль
и направление скорости. Ускорением
точки называется векторная величина,
характеризующая быстроту изменения
модуля и направления скорости.
В
литературе принято вектор ускорения
обозначать
![]() или
или
![]() .
Про направление вектора ускорения
относительно траектории движения точки
достоверно можно сказать только то, что
он всегда направлен в сторону
вогнутости кривой траектории движения
(рис. 2.6)
.
Про направление вектора ускорения
относительно траектории движения точки
достоверно можно сказать только то, что
он всегда направлен в сторону
вогнутости кривой траектории движения
(рис. 2.6)
.
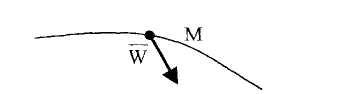
Рис. 2.6
Размерность ускорения равна единицам измерения длины, деленным на единицу измерения времени в квадрате. Единицы измерения могут быть м/с2, см/с2 и т.д. В системе СИ единица измерения ускорения м/с2.
При векторном способе задания движения ускорение точки определяется как первая производная от вектора скорости или вторая производная от радиус-вектора по времени:
![]() (2.8)
(2.8)
При координатном способе задания движения ускорение точки определяется как вектор:
![]() =
=![]() Wx
+
Wx
+
![]() Wy+
Wy+![]() Wz,
(2.9)
Wz,
(2.9)
где Wx,Wy,Wz - проекции вектора ускорения на координатные оси, причем
![]()
![]()
![]() (2.10)
(2.10)
To есть проекции вектора ускорения на координатные оси равны первым производным по времени от соответствующих проекций вектора скорости или вторым производным по времени от координат точки.
Модуль вектора ускорения в этом случае определяется формулой:
![]() (2.11)
(2.11)
а направление в пространстве - направляющими косинусами:
![]()
![]()
![]() (2.12)
(2.12)
При естественном способе задания движения точки вектор ускорения складывается из двух взаимно перпендикулярных составляющих
-
нормальной
![]() и касательной
и касательной
![]() .
Для
определения направлений этих составляющих
рассмотрим пространственную кривую
(рис. 2.7).
.
Для
определения направлений этих составляющих
рассмотрим пространственную кривую
(рис. 2.7).

Проведем
в некоторой произвольной точке М этой
кривой касательную. Ось, проводимая из
точки М по касательной в сторону
положительного приращения дуговой
координаты s=OM,
называется касательной осью. Ее
направление принято характеризовать
единичным вектором (ортом)
![]() .
Пусть
.
Пусть
![]() 1
-единичный вектор, определяющий
направление касательной к кривой в
какой -либо точке М1.
Параллельно перенеся вектор
1
-единичный вектор, определяющий
направление касательной к кривой в
какой -либо точке М1.
Параллельно перенеся вектор
![]() 1
в точку М, проведем плоскость через
векторы
1
в точку М, проведем плоскость через
векторы
![]() и
и
![]() 1,
приложенные в точке М. Если расстояние
между точками М и M1
уменьшать до бесконечности, то эта
плоскость в пределе займет определенное
положение. Полученную таким путем
плоскость называют соприкасающейся
плоскостью в точке М. Если рассматриваемая
кривая плоская, она будет целиком
расположена в соприкасающейся плоскости.
1,
приложенные в точке М. Если расстояние
между точками М и M1
уменьшать до бесконечности, то эта
плоскость в пределе займет определенное
положение. Полученную таким путем
плоскость называют соприкасающейся
плоскостью в точке М. Если рассматриваемая
кривая плоская, она будет целиком
расположена в соприкасающейся плоскости.
Ось,
проведенная из точки М в соприкасающейся
плоскости перпендикулярно к касательной
к кривой в данной точке и направленная
в сторону вогнутости кривой, называется
главной нормалью. Ее направление принято
характеризовать единичным вектором
(ортом)
![]() (рис.
2.7).
(рис.
2.7).
Соответственно, касательная составляющая ускорения направлена по касательной оси к траектории в данной точке, нормальная составляющая - по главной нормали (рис. 2.8), и они соответственно будут равны:
![]() (2.13)
(2.13)
![]() (2.14)
(2.14)
где
![]() (2.15)
(2.15)
- алгебраическое значение касательной составляющей ускорения;
![]() (2.16)
(2.16)
-
модуль нормальной составляющей
ускорения,
![]() -
радиус кривизны траектории в данной
точке.
-
радиус кривизны траектории в данной
точке.
Справка:
радиус кривизны кривой в данной точке
равен радиусу окружности, частью которой
можно заменить бесконечно малый участок
кривой в окрестности данной точки с
возможно большей точностью. Для окружности
радиус кривизны равен радиусу окружности
![]() = R.
Для прямой радиус кривизны в любой точке
равен бесконечности
= R.
Для прямой радиус кривизны в любой точке
равен бесконечности
![]() =
∞.
=
∞.
Если
![]() >0,
то вектора
>0,
то вектора
![]() и
и
![]() направлены
в одну сторону, если
направлены
в одну сторону, если
![]() <0,
то в противоположные (рис. 2.9).
<0,
то в противоположные (рис. 2.9).

Вектор
ускорения
![]() при
естественном способе задания движения
точки
можно определить по правилу параллелограмма
(рис. 2.10), соответственно
его модуль будет равен:
при
естественном способе задания движения
точки
можно определить по правилу параллелограмма
(рис. 2.10), соответственно
его модуль будет равен:
![]() (2.17)
(2.17)
Направление
вектора
![]() в
пространстве принято характеризовать
тангенсом
угла φ
между
этим вектором и касательной осью (рис.
2.10):
в
пространстве принято характеризовать
тангенсом
угла φ
между
этим вектором и касательной осью (рис.
2.10):
![]() (2.18)
(2.18)

Иногда уравнения движения точки заданы в координатной форме, а требуется определить нормальную и касательную составляющие ускорения и радиус кривизны траектории в некоторой точке. В этом случае для определения модулей нормальной и касательной составляющих удобно использовать выражения:
![]() (2.19)
(2.19)
![]() (2.20)
(2.20)
а затем определить радиус кривизны траектории по формуле:
![]() (2.21)
(2.21)
Если известно, что траектория движения точки плоская, то выражение (2.19) упрощается:
![]() (2.22)
(2.22)
Во всем многообразии задач на кинематику точки можно выделить несколько основных типов.
1. Задачи на определение законов движения и уравнений траектории. Они решаются в следующей последовательности:
а) выбираются система координат и точка ее начала так, чтобы дальнейшее решение было возможно более простым;
б) на основании условий задачи для избранной системы координат составляются уравнения движения точки, то есть находятся зависимости координат от времени;
в) исключая из уравнений движения время, получают уравнения траектории;
г) исследуя уравнения траектории и уравнения движения, отвечают на различные вопросы задач.
2. Задачи на определение по заданным уравнениям движения в координатной форме траектории движения, скорости, составляющих ускорения и модуля ускорения точки, а также радиуса кривизны траектории в данной точке. Они решаются в следующей последовательности:
а) исключая время из уравнений движения, определяют уравнения траектории; если траектория движения прямая или окружность, то радиус кривизны в любой точке этих траекторий постоянен и соответственно равен бесконечности или радиусу окружности;
б) дифференцируя координаты точки, определяют проекции вектора скорости и ускорения на оси неподвижной декартовой системы координат и их модули;
в) используя выражения (2.19) или (2.22), определяют модуль касательной составляющей ускорения;
г) если радиус кривизны траектории определен по ее виду, то определяют модуль нормальной составляющей по формуле (2.16), в противном случае - по формуле (2.20);
д) если траектория движения не прямая или окружность, то определяют радиус кривизны траектории по формуле (2.21).
3.Задачи на определение уравнений движения и траектории, если ускорение движения точки задано. Они решаются в следующей последовательности:
а) выбирается система координат;
б) определяются проекции вектора ускорения на оси системы координат;
в) интегрируя полученные проекции, определяют проекции вектора скорости на оси координат;
г) интегрируя выражения для проекций скорости, определяют уравнения движения точки;
д) исключая из уравнений движения время, определяют уравнение траектории;
е) исследуют уравнение траектории.
Пример 2.1. Кривошип ОМ длиной l вращается вокруг оси, перпендикулярной плоскости рисунка и проходящей через точку О (рис. 2.11). Угол φ между неподвижной осью Ох и кривошипом изменяется по закону φ = kt, где k- некоторая постоянная величина, t-время. Необходимо: составить уравнения движения точки в декартовой системе координат, найти уравнение ее траектории, определить время одного оборота точки.
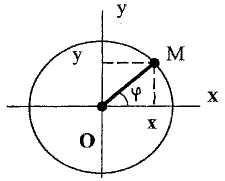
Рис. 2.11
Введем ось Оу декартовой системы координат, направив ее вверх перпендикулярно оси Ох. Координаты точки М в этой системе координат будут равны:
x = lcos φ; y = lsin φ,
или
x = lcoskt; y = lsinkt. (2.23)
Это и будут искомые уравнения движения точки М.
Чтобы найти уравнение траектории в явной форме, надо исключить из уравнений движения время. Для этого возведем каждое из уравнений (2.23) в квадрат и сложим их. Учитывая известную формулу тригонометрии, получим:
х2+у2=l2.
Следовательно, траекторией движения точки М является окружность с радиусом l и центром в начале координат.
Определим время одного оборота точки М. Это время Т, за которое угол φ изменится на 2π радиан:
φ = кТ = 2π,
откуда:
Т = 2π /к.
Пример 2.2. По заданным уравнениям движения точки М х = 4t (м), у = 16t2 - 1 (м) установить вид ее траектории и для момента времени t=t1=0,5 с, найти положение точки на траектории, ее скорость, полное ускорение, касательную, нормальную составляющие ускорения, а также радиус кривизны траектории в соответствующей точке.
Для определения уравнений траектории движения точки исключим время t из уравнений движения. Для этого выразим t из уравнения для координаты х и подставим в уравнение для координаты у, получим:
у= х2-1.
Найденное уравнение есть уравнение параболы (рис. 2.12).
Подставляя t= t1 в уравнения движения, определим координаты точки М на траектории в заданный момент времени:
x1 = 4t1 = 2 м; у1 = 16 t12 -1 = 3 м,
и нанесем ее на график траектории (рис.2.12).
Дифференцируя уравнения движения точки, найдем проекции вектора скорости на оси координат:
![]()
![]() (2.24)
(2.24)
Для момента времени t= t1 будем иметь:
Vx =4м/с; Vy= 16м/с.
Модуль скорости точки будет равен:
![]()
Дифференцируя уравнения (2.24), найдем проекции ускорения точки на оси координат:
![]()
![]()
Модуль ускорения точки будет равен:
![]()
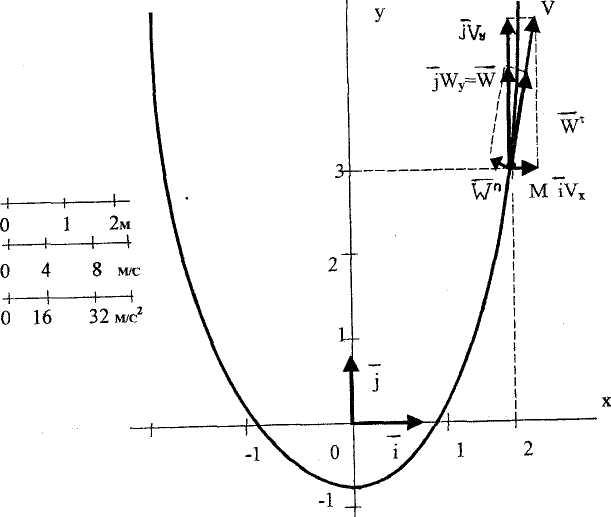
Рис. 2.12
Касательную составляющую ускорения определим, используя формулу (2.22):
![]()
Модуль нормальной составляющей ускорения в данный момент времени будет равен:
![]()
Радиус кривизны траектории в данной точке будет равен:
![]() =
V
2/
Wn
=34,3
м.
=
V
2/
Wn
=34,3
м.
На графике траектории (рис.2.12) в найденном положении точки М и в выбранном масштабе построим вектора скорости, ускорения и их составляющих.
Пример
2.3.
Из
пушки выстреливают снарядом со скоростью
V0
под
углом
![]() к
горизонту. Вылетев из ствола, снаряд
продолжает движение под
действием силы тяжести, сообщающей ему
вертикальное ускорение
к
горизонту. Вылетев из ствола, снаряд
продолжает движение под
действием силы тяжести, сообщающей ему
вертикальное ускорение
g
= 9,8 м/с . Считая поверхность Земли
горизонтальной, определить уравнение
траектории движения снаряда и максимальную
высоту, на которую
поднимется снаряд, а также при каком
значении угла
![]() будет
достигнута
максимальная дальность полета.
будет
достигнута
максимальная дальность полета.
Так
как траектория полета снаряда лежит в
вертикальной плоскости, введем
в рассмотрение декартову систему
координат, состоящую из двух взаимно
перпендикулярных осей. Начало системы
координат расположим в точке вылета
снаряда из ствола орудия, ось Оу направим
вертикально вверх, ось Ох - горизонтально
в направлении полета снаряда (рис. 2.13).
Поэтому
начальные условия по координатам будут
нулевыми, то есть х(0)=0,
у(0)=0.Время в момент вылета снаряда из
ствола выберем за ноль, то
есть t
= to
= 0. Проецируя вектор
![]() на
оси координат, определим начальные
условия по скорости:
на
оси координат, определим начальные
условия по скорости:
Vx(0)
= V0cos![]() ;
Vy(0)
= Vosin
;
Vy(0)
= Vosin![]() .
.
По условию задачи:
Wx = 0, Wy= - g.
Но согласно (2.12):
![]()
![]()
поэтому можем записать:
![]()
![]() (2.25)
(2.25)
Разделяя переменные в уравнениях (2.25) и интегрируя их, получим:
Vx = C1; Vy= - gt + C2, (2.26)
где C1, C2 – постоянные интегрирования.
Подставляя в (2.26) начальные условия по времени и скорости, найдем:
С1
=
Vo
cos![]() ;
C2
=
Vo
sin
;
C2
=
Vo
sin![]() .
.
Подставляя найденные постоянные интегрирования в (2.26), получим уравнения, описывающие изменение скорости полета снаряда от времени:
Vx=V0
cos![]() ;
Vy=-gt
+ Vo
sin
;
Vy=-gt
+ Vo
sin![]() .
(2.27)
.
(2.27)
Но согласно (2.3)
![]()
![]()
поэтому можно записать:
![]()
![]() (2.28)
(2.28)
Разделяя переменные в уравнениях (2.28) и интегрируя их, получим:
x
= V0
cos![]() ·t
+ C3;
y = -
·t
+ C3;
y = -
![]() +V0
sin
+V0
sin![]() · t + C4, (2.29)
· t + C4, (2.29)
где С3, С4 - постоянные интегрирования.
Подставляя в (2.29) начальные условия по времени и координатам, найдем:
С3=0; С4=0.
Подставляя найденные постоянные интегрирования в (2.29), получим уравнения, описывающие закон движения снаряда в координатной форме:
![]() (2.30)
(2.30)
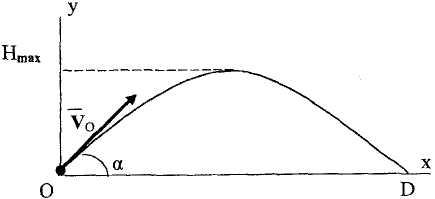
Рис. 2.13
Для определения уравнения траектории в явной форме исключим из уравнений (2.30) время. Для этого выразим t из первого уравнения (2.30) и подставим во второе, получим:
![]()
Это есть уравнение параболы (рис. 2.13).
Максимальная высота полета будет достигнута в момент изменения направления вертикальной составляющей скорости, то есть в момент t = t1, в который вертикальная составляющая скорости будет равна нулю. Приравнивая к нулю правую часть второго уравнения (2.27) и заменяя в нем t на t1, получим:
-gt1
+ Vo
sin![]() =O,
=O,
откуда:
t1
=
![]() sin
sin![]()
Подставляя t1 во второе уравнение (2.30), найдем:
![]()
Дальность полета может быть определена как значение координаты х в момент t = t2, в который снаряд коснется поверхности Земли, то есть когда значение координаты у будет равно нулю. Заменяя в правой части второго уравнения (2.30) t на t2 и приравнивая ее к нулю, получим уравнение:
![]()
которое имеет два решения:
Первое решение соответствует моменту вылета снаряда из ствола, второе – достижению поверхности Земли в конце троектории. Подставляя t**2 в первое уравнение (2.30), получим:
(2.31)

Очевидно,
что правая часть (2.31) достигнет
максимума при
sin2![]() = 1
, что соответствует
= 1
, что соответствует
![]() =
45°. Отсюда:
=
45°. Отсюда:
![]()