

Вопрос 41. Уравнения напряжений, мдс и токов асинхронного двигателя. Приведение параметров обмотки ротора. Векторная диаграмма и порядок ее построения. Схема замещения асинхронного двигателя.
Уравнение напряжений обмотки статора асинхронного двигателя:
 1
= (-
1
= (- 1)
+ j
1)
+ j
 1
x1
+
1
x1
+
 1r1
1r1
Уравнение напряжений для цепи ротора асинхронного двигателя:
 2s
- j
2s
- j 2
x2
s
-
2
x2
s
- 2
r2
2
r2
Уравнение токов асинхронного двигателя:
I1 =Io – I`2
МДС обмоток статора и ротора на один полюс в режиме нагруженного двигателя
F1
= 0,45 m1
I1
ω1
kоб1/
P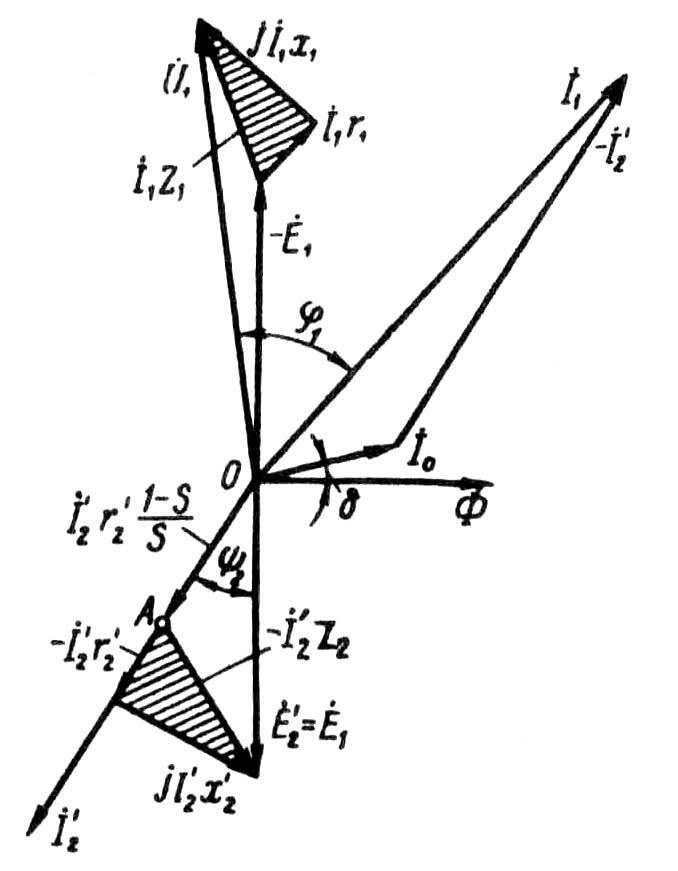
F2 = 0,45 m2 I2 ω2 kоб2/ P
где m2 — число фаз в обмотке ротора; ko62 — обмоточный коэффициент обмотки ротора.
Чтобы векторы ЭДС, напряжений и токов обмоток статора и ротора можно было изобразить на одной векторной диаграмме, следует параметры обмотки ротора привести к обмотке статора, т. е. обмотку ротора с числом фаз m2, обмоточным коэффициентом ko62 и числом витков одной фазной обмотки ω2 заменить обмоткой с m1, ω1 и kоб1. При этом мощности и фазовые сдвиги векторов ЭДС и токов ротора после приведения должны остаться такими же, что и до приведения.
Основанием для построения этой диаграммы являются уравнение токов и уравнения напряжений обмоток статора и ротора.
Порядок построения векторной диаграммы:
1. Откладываем вектор магнитного потока Ф.
2. Под углом 90о к Ф в сторону отставания откладываем векторы ЭДС Е2/ и Е1.
3. Под углом фи2 к вектору Е2/ в сторону отставания (обмотка ротора содержит индуктивность) откладываем вектор тока I2/.
4. Используя третье уравнение токов находим вектор тока ротора I2/.
5. Вектор напряжения U1 определяются путем построения по уравнению напряжения.
6. Достраиваем диаграмму, учитывая уравнение напряжения ротора.
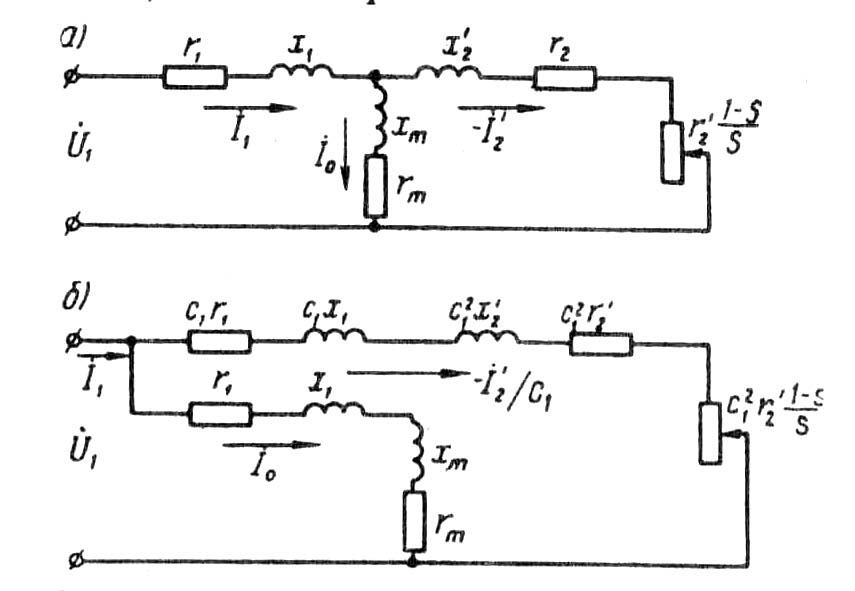
Схемы замещения применяет для упрощения расчетов.
На рис. а представлена Т-образная схема замещения. Магнитная связь обмоток статора и ротора в асинхронном двигателе на схеме замещения заменена электрической связью цепей статора и ротора. Активное сопротивление можно рассматривать как внешнее сопротивление, включенное в обмотку неподвижного ротора. В этом случае асинхронный двигатель аналогичен трансформатору, работающему на активную нагрузку. Сопротивление– единственный переменный параметр схемы. Значение этого сопротивления определяется скольжением, а следовательно, механической нагрузкой на валу двигателя. Так, если нагрузочный момент на валу двигателя М2 = 0, то скольжение s ≈ 0. При этом r2' (1 - s )/ s = ∞, что соответствует работе двигателя в режиме х.х. Если же нагрузочный момент на валу двигателя превышает его вращающий момент, то ротор останавливается (s=1). При этом r2'(1 - s )/ s = О, что соответствует режиму к.з. асинхронного двигателя.
Более
удобной для практического применения
является Г- образная схема замещения
(рис. б), у которой намагничивающий
контур (Zm
= rm+
j
xm)
вынесен на входные зажимы схемы замещения.
Чтобы при этом намагничивающий ток I0
не изменил своего значения, в этот контур
последовательно включают сопротивления
обмотки статора r1
и х1.
Полученная таким образом схема удобна
тем, что она состоит из двух параллельно
соединенных контуров: намагничивающего
с током
 0
и рабочего с током -
0
и рабочего с током -
 ′2.
Расчет параметров рабочего контура
Г-образной схемы замещения требует
уточнения, что достигается введением
в расчетные формулы коэффициента с1,
представляющего собой отношение
напряжения сети U1
к ЭДС статора Е1
при идеальном холостом ходе (s
= 0). Так как в этом режиме ток холостого
хода асинхронного двигателя весьма
мал, то U1
оказывается лишь немногим больше, чем
ЭДС Е1,
а их отношение с1
=U1/
E1
мало отличается от единицы.
′2.
Расчет параметров рабочего контура
Г-образной схемы замещения требует
уточнения, что достигается введением
в расчетные формулы коэффициента с1,
представляющего собой отношение
напряжения сети U1
к ЭДС статора Е1
при идеальном холостом ходе (s
= 0). Так как в этом режиме ток холостого
хода асинхронного двигателя весьма
мал, то U1
оказывается лишь немногим больше, чем
ЭДС Е1,
а их отношение с1
=U1/
E1
мало отличается от единицы.