7. Расчет переходного процесса с помощью решателей системы matlab:
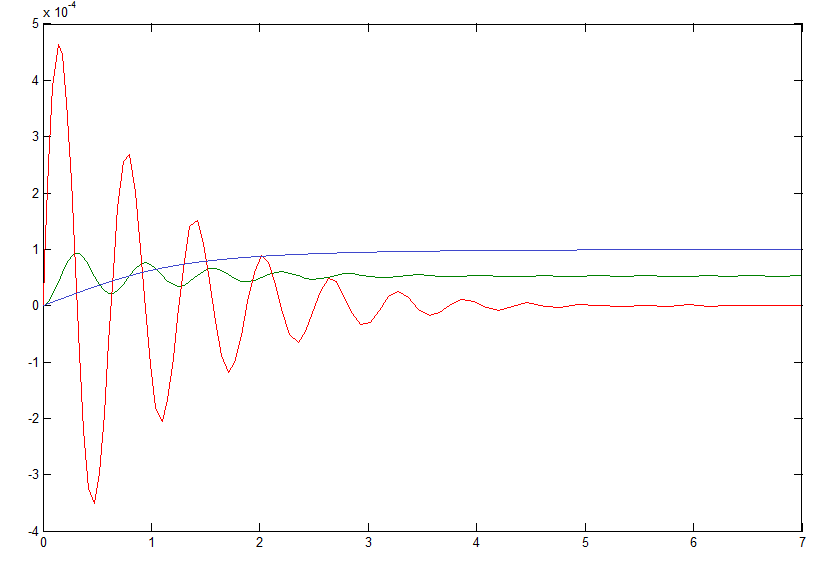
Для получения переходного процесса необходимо численно решать уравнение системы. Для численного решения применяется метод Рунге Кутта.
Предположим, что требуется решить задачу Коши в виде (16). Для решения необходимо составить файл-функцию для вычисления правых частей (16). С этой целью в главном меню системы МАТLAB выбирается команда File->New->M-file . В результате откроется окно редактора m-файлов. В это окно необходимо ввести файл-функцию. Для рассматриваемой задачи (16) текст файл-функции будет таким:
function CMO = vdp(t,y)
a0=315.31
a1=1499.86
a2=50001
a3=10000;
b3=10000;
G = 3.4;
dy1 = y(2);
dy2 = y(3);
dy3 = b3*G/a0-a1*y(3)/a0-a2*y(2)/a0-a3*y(1)/a0;
CMO = [dy1; dy2; dy3];
Для получения решения в интервале времени [0, t0] в командном окне
размещается обращение к функции ode23:
[t, y] = ode23( 'vdp' , [0, 5], [0, 0, 0]); (17)
Далее на панели инструментов нажимается клавиша Enter. В этом же
командном окне печатаются результаты решения. Для построения графика используется функция:
[t, y] = plot(0, 5);
В результате мы получаем график:
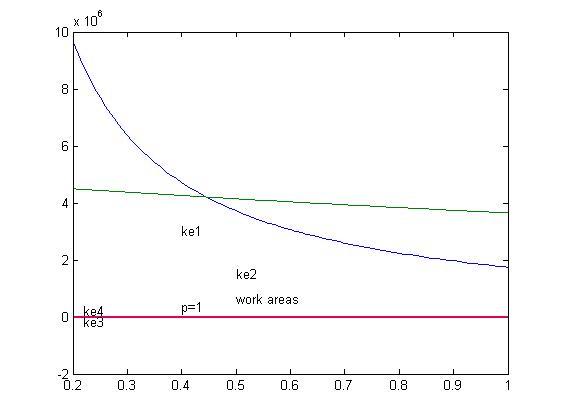
8. Автоматизация расчета рабочей области.
Для расчета и построения графиков границ рабочей области используются выражения (11), но при этом в них знак неравенства должен быть заменен на знак равенства. После такой замены эти выражения становятся уравнениями границ рабочей области.
Исходными данными
для расчета являются численные значения
коэффициентов
![]() .
.
При расчете по
каждому уравнению рассчитываются
значения коэффициента усиления
![]() при пошаговом изменении в некотором
диапазоне постоянной времени
при пошаговом изменении в некотором
диапазоне постоянной времени
![]() .
.
После окончания
расчета в системе координат
![]() ,
,
![]() строятся кривые границ. Далее требуется
совместить их на одном графике и выделить
рабочую область.
строятся кривые границ. Далее требуется
совместить их на одном графике и выделить
рабочую область.
Объем работы существенно сокращается, если все делать с помощью компьютера и системы MATLAB.
Текст программы в системе MATLAB:
km=100;
К1= 10,766
К2=2,59(1+Кму)
К3=10,766 (1+Кму)
К5= 0,001 Кму
%1 граница
t1=0.2:.01:1;
ke1=(6*(t1+k3).^2-k1*k4*t1-k2*k4)./(t1.*(k1*k5*t1+k2*k5));
%2 граница
t2=0.2:.01:1;
ke2=(t2+k3).^3./((k1*t2+k2).^2*k5);
%3 граница
t3=0.2:.01:1;
ke3=0.5*k4*(t3+k3)./(k5*(t3*k1+k2-0.5*t3.^2-0.5*t3*k3));
%4 граница
t4=0.2:.01:1;
b=k5*(12*k4*t4-t4-k3);
c=6*k4^2;
a=6*t4.^2+k5^2;
ke4=(-b+sqrt(b.^2-4*a*c))./(2*a);
%разделительная линия
t0=0.2:.01:1;
a0=0.75*t0.^2*k5*2;
b0=1.5*k4*k5*t0-k5.*(t0+k3)*0.75;
c0=0.75*k4^2;
ke0=(-b0+sqrt(b0.^2-4*a0*c0))./(2*a0);
%вывод графиков
plot(t1, ke1, t2, ke2, t3, ke3, t4, ke4, t0, ke0);
%координаты надписей над кривыми
text(0.4, 3*10^6, 'ke1');
text(0.5, 1.5*10^6, 'ke2');
text(0.22, -0.2*10^6, 'ke3');
text(0.22, 0.21*10^6, 'ke4');
text(0.4, 0.32*10^6, 'p=1');
text(0.5, 0.6*10^6, 'work areas');
%контроль принадлежности к рабочей обл.
toc=0.4;
ke=1*10^6;
a0=k1*toc+k2;
a1=toc+k3;
a2=k4+toc*ke*k5;
a3=k5*ke;
raz1=a0*a2-6*a1^2;
raz2=a0^2*a3-a1^3;
raz3=a0*a3-0.5*a1*a2;
raz4=a1*a3-6*a2^2;
%вычисление po, tp.
po=(a3*a1)/(0.75*a2^2);
tp=3*a2/a3;
В результате получилось: