

-
Расчёт сопротивления реостата на участке диаграммы м1 – м2
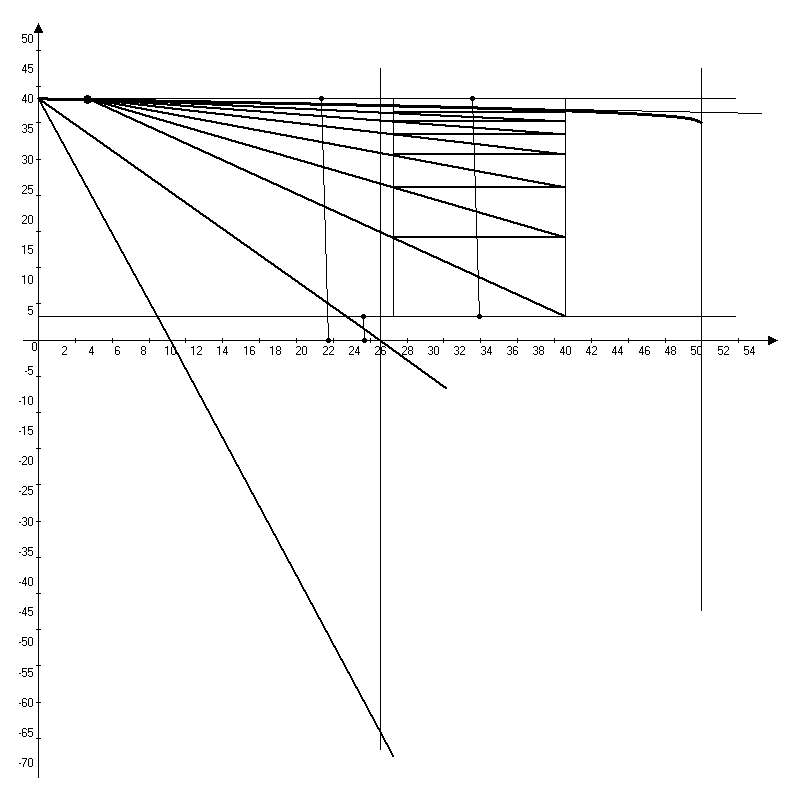
Так как при большом сопротивлении реостата в цепи ротора механические характеристики асинхронного двигателя на рабочем участке практически линейны, построение производится как для двигателя постоянного тока с независимым возбуждением. Для обеспечения среднего ускорения, равного заданному, через середину отрезка М1 – М2 и точку холостого хода (М=0;ω=ωо) проводят прямую линию, соответствующую искусственной реостатной механической характеристике при сопротивлении ступени R2 (рис. 3.1).
Для определения масштаба сопротивления тr из точки холостого хода проводим горизонтальную, а из точки q, соответствующей номинальному моменту Мн, вертикальную прямые. На пересечении этих прямых получаем точку а. Отрезок ад в относительных единицах соответствует номинальному сопротивлению роторной цепи.
Номинальное сопротивление роторной цепи асинхронного двигателя:
Масштаб
сопротивлений:

На
пересечении вертикальной линии,
соответствующей номинальному моменту,
с естественной механической характеристикой
и с искусственной реостатной характеристикой
получаем точки b
и h.
Отрезок bh
в относительных единицах соответствует
сопротивлению ступени R2
роторной цепи. Значение сопротивления
R2
определяем из выражения: R2
= mr bh
.
bh
.
Расчёты:


-
Расчёт сопротивления реостата на участке диаграммы м3 – м4
При незначительном и линейном изменении момента на данном участке пуска (несколько процентов от начального) для обеспечения заданного постоянного ускорения параллельно линии М3 - М4 проводим линии минимального Мпр1 и максимального Мпр2 пусковых моментов переключения до пересечения с горизонтальной линией, проведенной из точки холостого хода.
 .
.
Значения сопротивления ступеней определяют из выражений:

где bf, be, bd, bc, - отрезки, соответствующие сопротивлениям ступеней R3, R4, R5, R6 роторной цепи в относительных единицах.
Расчёты:




R6
= mr bh=0,003·210=0,63
Ом
;
bh=0,003·210=0,63
Ом
;





ω,
с-1
Мс.к
М4
ω0
t
a
b
c
d
e
f
g
h
М2
ω1
Мпр
Мс.н
М3
·
Мпр1
Мпр2
М,
кН·м
М1
i
Мкр
Мн
j
Рис. 3.1. Пусковая диаграмма
-
Построение тормозных диаграмм и расчёт тормозных реостатов
Согласно тахограмме (рис.2.1) торможение привода осуществляется в течение трех периодов: t4, t5, t6. В период t4 происходит основное замедление привода от vycm до v5. Так как в нашем случае М7 … М8 больше нуля, то применяется торможение в двигательном режиме.
В период дотягивания t5 движение привода происходит с постоянной скоростью v5. Режим работы электропривода - двигательный. При этом моменты М9 и М10 больше нуля и равны статическим моментам нагрузки.
В период t6 происходит стопорение привода с заданным замедлением a6. Моменты М11 и M12 больше нуля, поэтому режим работы электропривода - торможение в двигательном режиме.
По рассчитанным значениям моментов М6, М7, M8, М9, М10, М11, М12 и угловой скорости ωуст , ω5 строим тормозную диаграмму (рис.4.1.) .