

Катушка с ферромагнитным сердечником.
Зависимость магнитного потока в сердечнике от тока катушки
при синусоидальном Ф(t) нелинейна из-за нелинейной зависимости В(Н), а магнитный поток Ф отстает по фазе от тока i на угол d из-за потерь на перемагничивание. При питании синусоидальным напряжением u(t) ток i(t) в катушке с ферромагнитным сердечником искажается и является несинусоидальным. Кривая тока i(t) строится графически
по веберамперной характеристике катушки Y(i). С целью упрощения расчет катушки с ферромагнитным сердечником проводится для эквивалентного синусоидального тока iэк(t),
имеющего с реальным несинусоидальным током i(t) одинаковое действующее значение (I=Iэк) при частоте питающего напряжения и развивающего одинаковую с ним активную мощность (одинаковое значение коэффициента мощности):
I=cos
 эк=
эк=
Тогда уравнение электрического состояния катушки со сталью записывается по второму закону Кирхгофа и может быть представлено в комплексной форме
U RI jωLр I E (R jX р) I U
где
U
- комплексное значение напряжения; Е
– комплекс
ЭДС самоиндукции, обусловленной основным
магнитным потоком; I
- комплексное
значение тока; R -
активное сопротивление катушки; Xр=wLр
- индуктивное сопротивление катушки,
обусловленное потоком рассеяния. 
По этому уравнению могут быть построены векторная диаграмма токов и
напряжений и составлены эквивалентные схемы замещения катушки со сталью, параллельна и последовательная.
Векторная диаграмма токов и напряжений строится по расчетным или экспериментальным данным:
1) определяются напряжение U& ,
ток I, угол сдвига фаз j между ними и изображаются на
комплексной плоскости (например, в предположении, что начальная фаза напряжения равна 90°);
2) рассчитываются R, Xр и напряжения на соответствующих элементах, графически (согласно уравнению состояния цепи) находятся вектор U ф , направление вектора Ф m (отстает по фазе от напряжения U ф на 90°), угол δ и составляющие тока Iа, Iр (как проекции на направления потока и вектора напряжения U ф).
На
диаграмме Đа
– вектор активной составляющей тока
(обусловленной потерями мощности в
стали), Iр
- вектор реактивной составляющей тока
(создается основным магнитным потоком),
 - угол между векторами тока и основного
магнитного потока (угол магнитных
- угол между векторами тока и основного
магнитного потока (угол магнитных
потерь,
приближенно
 » 900-
» 900-
 ).
).
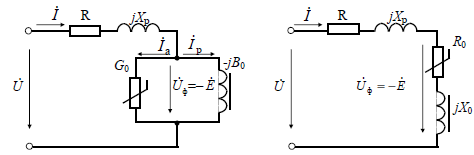
Потери мощности на гистерезис и вихревые токи на схемах замещения учитываются нелинейной проводимостью G0 или
нелинейным сопротивлением R0 . Напряжение Uф обуслов-
лено ЭДС самоиндукции основного потока
![]()
где В0 и X0 - индуктивная проводимость и индуктивное сопротивление соответственно, обусловленные основным магнитным потоком Ф(намагничивающей мощностью Qн).
Потери мощности в стали Рст и намагничивающая мощность Qн связаны с параметрами схем замещения и соответствующими электрическими величинами следующим образом:
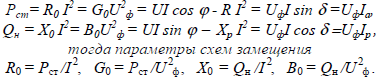
Активное сопротивление R обмотки определяется экспериментально на постоянном токе. Индуктивный элемент схемы замещения Хр=ωLр обусловлен потоком рассеяния Фр. Если степень насыщения стали и воздушные зазоры невелики, для ориентировочного определения индуктивного сопротивления рассеяния применяется эмпирическая формула
Xр
 (1,5 ¸
2,5) R.
(1,5 ¸
2,5) R.
Полное сопротивление катушки с магнитопроводом:
Zэк=U/I.
Эквивалентное активное сопротивление Rэк катушки определяется по значению потребляемой активной мощности P или по потерям мощности на перемагничивание Pст и активному сопротивлению R проводов катушки
Rэк= P/I2=(Pст /I 2)+R,
эквивалентное индуктивное сопротивление катушки:
Xэк=Xр+X0=
