

Способы регулирования частоты вращения двигателя постоянного тока.
Для получения высокой производительности и требуемой точности или шероховатости обработки изделий, остановки исполнительного органа производственной машины в нужном месте с заданной степенью точности и т. д. приходится принудительно изменять частоту вращения или скорость линейного перемещения исполнительного органа. Принудительное изменение частоты вращения или линейного перемещения исполнительного органа производственной машины в соответствии с требованием производственного процесса называется регулированием скорости.
В настоящее время взамен коробок скоростей, вариаторов и т. п. все больше применяется электрическое регулирование частоты вращения, в основе которого лежит использование искусственных, механических характеристик электродвигателей. Электрическое регулирование частоты вращения приводит к упрощению, облегчению и удешевлению механической части машин и механизмов, упрощению управления, возможности получения плавного регулирования частоты вращения в широком диапазоне.
При питании двигателей от источника постоянного напряжения (см. рис. 9.22) частоту вращения можно регулировать следующим образом: 1) изменением сопротивления цепи якоря; 2) изменением значения магнитного потока.
Естественно, что второй метод регулирования применим лишь к двигателям параллельного и смешанного возбуждения.
Для регулирования частоты вращения путем изменения сопротивления цепи якоря обычно используют тот же реостат, что и для пуска двигателя. Например, с помощью реостата, для которого на 9.27 изображены механические характеристики, при моменте М = Мс можно получить частоты вращения n4, n5 и n6. В том случае, когда необходимо иметь и другие частоты вращения, реостат снабжают дополнительными ступенями сопротивлений. Реостат, используемый как для пуска, так и для регулирования частоты вращения, находится в отношении нагревания в более тяжелых условиях, чем реостат, служащий только для пуска.
При изменении сопротивления в цепи якоря происходит следующее. Допустим, что двигатель параллельного, последовательного или смешанного возбуждения работает на естественной характеристике с моментом М = Мс и частотой вращения nс (см. рис. 9.27). В первое мгновение после включения в цепь якоря реостата с сопротивлением r = r1 + r2 + r3 из-за инерционности двигателя частота вращения не изменяется. Увеличение сопротивления при неизменной частоте вращения приводит к уменьшению тока якоря, а значит, и момента двигателя. При частоте вращения nс двигатель перейдет на характеристику 1 и будет развивать момент М3 . Так как М3 <Мс, то начнется переходный процесс, при котором частота вращения двигателя будет снижаться. Это вызывает уменьшение ЭДС, а следовательно, увеличение тока якоря и момента двигателя. Установившийся режим наступает при частоте вращения n4, при которой М = Мс.
Рассматриваемый способ регулирования частоты вращения не требует сложного оборудования и дает возможность получить любую пониженную частоту вращения при заданной нагрузке. Однако он имеет и существенные недостатки. Одними из из них являются «мягкие» искусственные механические характеристики, благодаря чему частота вращения при данном сопротивлении сильно зависит от нагрузки двигателя. «Мягкие» характеристики затрудняют получение требуемых, особенно низких частот вращения при различных нагрузках. Другой недостаток заключается в том, что регулирование частоты вращения сопровождается потерями мощности в реостате, которые возрастают по мере увеличения сопротивления r и снижения частоты вращения.
Умножив правую и левую части уравнения (9.18) на ток якоря, получим уравнение баланса мощности цепи якоря
UIя = ЕIя + Iя2(rя + r),
где UIя — мощность, потребляемая из сети; ЕIя — электромагнитная мощность, т. е мощность, преобразуемая электродвигателем из электрической в механическую; Iя2(rя + r) — потери мощности в сопротивлениях цепи якоря.
|
|
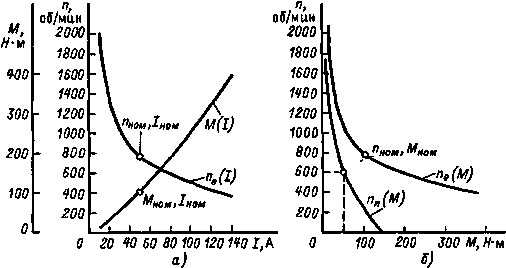
Рис. 9.28. Электромехани- ческая характе- ристика nе(I) и зависимость М(I) (а); механические характеристики n(М) двигателя последова тельного возбуждения к примерам 9.3 и 9.5 (б) |
Так как при работе двигателя с М = Мс = const ток якоря не зависит от сопротивления в цепи якоря, то при увеличении последнего мощность UIя остается постоянной. Происходит лишь ее перераспределение: с увеличением сопротивления rи снижением частоты вращения электромагнитная мощность уменьшается, а потери мощности возрастают. При n→ 0 ЕIя→ 0, а I2(rя + r) → UIя. Значительные потери мощности в цепи якоря приводят к снижению КПД установки.
Пример 9.3. Двигатель последовательного возбуждения имеет следующие технические данные: Uном = 220 В, Рном = 8,5 кВт, nном = 770 об/мин, Iном = 50 А. Сопротивление якоря rя = 0,75 Ом. Естественная электромеханическая характеристика nе(I) и зависимость М(I) даны на рис. 9.28,а.
Построить естественную механическую характеристику nе(М). Определить сопротивление резистора r, который необходимо включить в цепь якоря, чтобы при моменте М = 50 Н • м получить частоту вращения n = 600 об/мин. Построить искусственную механическую характеристику nи(М), соответствующую сопротивлению r.
Решение. Естественную механическую характеристику nе(М) (рис. 9.28, б) строим с помощью графиков nе(I) и М(I).
По заданному моменту М = 50 Н • м с помощью кривой М(I) находим ток I = 29 А = Iя, после чего по характеристике nе(I) определяем частоту вращения nе = 1050 об/мин. Из формулы (9.24), подставив в нее nи = 600 об/мин, Iя = 29 А и nе = 1050 об/мин, определяем, что сопротивление r= 2,8 Ом.
Расчет искусственной механической характеристики производят в следующем порядке. Задаются моменты, например М = 100 Н • м, по кривой М(I) определяют ток I = 48 А = Iя ; пользуясь характеристикой nе(I), по току I = 48 А находят nе = 780 об/мин. По формуле (9.24) определяют частоту вращения nи = 212 об/мин.
Искусственная механическая характеристика nи(М) приведена на рис. 9.28, б Для регулирования частоты вращения двигателей параллельного и смешанного возбуждения путем изменения магнитного потока в цепь шунтовой обмотки включают реостат rр (см. рис. 9.22). Изменение сопротивления последнего приводит к изменению тока Iв и, следовательно, магнитного потока. При регулировании частоты вращения указанным методом резистор r из цепи якоря обычно выключают.
Рассмотрим более подробно данный метод применительно к двигателю параллельного возбуждения. Зависимость между частотой вращения и магнитным потоком при М = const определяется уравнением (9.21).
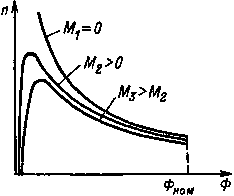
Чтобы можно было составить представление о характере изменения частоты вращения, на рис. 9.29 приведены зависимости n(Ф).
Как видно, при работе двигателя вхолостую (M1 = Mcl = 0) с уменьшением магнитного потока частота вращения возрастает и при Ф → 0 n → ∞. Если же двигатель нагружен (М = Мс ≠ 0), то при уменьшении магнитного потока частота вращения сначала возрастает, а затем, достигнув максимального значения, уменьшается. Одна и та же частота вращения в случае М = Мс ≠ 0 может быть получена при двух различных значениях магнитного потока. Однако рабочей областью, в которой обычно производится регулирование частоты вращения, является область, соответствующая большим магнитным потокам, где с уменьшением потока частота вращения возрастает.
На основании выражения М = kMФIя можно также сделать важный вывод о том, что при М =Мс = const и уменьшении магнитного потока ток Iя возрастет. Это необходимо учитывать при выборе мощности двигателя.
Из уравнения (9.21) следует, что механические характеристики двигателя параллельного возбуждения n(М) при различных значениях магнитного потока прямолинейны; меньшим значениям магнитных потоков соответствуют большие частоты вращения и более «мягкие» механические характеристики (рис. 9.30). Например, установив потоки Ф1, Ф2 и Ф3, получим при моменте сопротивления Мс частоты вращения п1, п2 и п3.
|
|
|
Рис. 9.29. Зависимости n(Ф) двигателя параллельного возбуждения при различных моментах |
|
|
|
Рис. 9.30. Механические характеристики двигателя параллельного возбуждения при различных магнитных потоках |
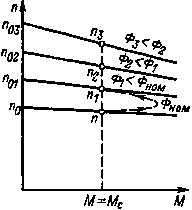
Переход от одной механической характеристики к другой происходит не при постоянной частоте вращения, а в соответствии с так называемой динамической характеристикой n(М), показанной на рис. 9.30 пунктиром. Это объясняется значительной индуктивностью обмотки возбуждения, из-за которой изменение магнитного потока происходит не мгновенно, а постепенно, одновременно с увеличением частоты вращения.
Одним из достоинств рассмотренного способа регулирования частоты вращения является его экономичность, так как дополнительные потери мощности в регулировочном реостате rр невелики. К достоинствам следует отнести также достаточно «жесткие» механические характеристики, что облегчает получение нужных частот вращения при различных нагрузках.
Серьезным недостатком следует считать то, что регулирование частоты вращения путем изменения магнитного потока можно производить лишь в области вверх от естественной механической характеристики.
Пример 9.4. Определить, во сколько раз необходимо уменьшить магнитный поток двигателя примера 9.1, чтобы при моменте М = 45 Н • м получить частоту вращения nи = 1600 об/мин. Установить, не будет ли перегреваться двигатель при длительной работе с ослабленным потоком. Построить искусственную механическую характеристику, соответствующую ослабленному потоку.
Р е ш е н и е. Заменив в (9.21) kM через kе /0,105 и учитывая, что магнитный поток и частота вращения соответствуют искусственной механической характеристике, найдем
|
kеФи = |
U |
+ |
√ |
( |
U |
)2 - |
0,105Мrя |
≈ 0,132. |
|
2nи |
2nи |
nи |
При номинальном магнитном потоке kеФ = 0,185. Таким образом, магнитный поток необходимо уменьшить в
|
Ф |
= |
kеФ |
= |
0,185 |
= 1,4 раза. |
|
Фи |
kеФи |
0,132 |
При работе с ослабленным потоком
|
Iя = |
M |
= |
М 0,105 |
= |
45 0,105 |
≈ 36 А |
|
kMФи |
kеФи |
0,132 |
Так как ток якоря меньше номинального, то двигатель перегреваться не будет
Искусственная механическая характеристика с ослабленным потоком подчиняется уравнению
|
nи = |
U |
- |
Mrя |
= |
220 |
- |
М 0,3 |
≈ 1667 - 1,8 М |
|
kеФи |
kеkMФи2 |
0,132 |
0,132 1,26 |
и дана на рис 9,26 (характеристика 3)
Как было отмечено выше, серьезным недостатком регулирования частоты вращения путем изменения сопротивления в цепи якоря при обычных схемах включения двигателей (см рис 9.22) является сложность получения при различных нагрузках пониженных частот вращения из-за слишком «мягких» механических характеристик.
Для устранения этого недостатка находят применение различные другие способы получения искусственных механических характеристик, отличающихся большей «жесткостью».
Например, довольно часто применяется потенциометрическое включение двигателей, при котором якорь двигателя подключается к делителю напряжения (потенциометру), с помощью которого можно получать пониженные напряжения на выводах якоря и как следствие — пониженные частоты его вращения при достаточно «жестких» механических характеристиках. Следует заметить, что с увеличением нагрузки напряжение якоря при потенциометрическом включении снижается, а это приводит к уменьшению «жесткости» характеристик.
В случаях особо высоких требований к «жесткости» механических характеристик находят применение различные варианты систем с регулируемым напряжением, подводимым к якорю двигателя.
Простейшая схема одного из вариантов такой системы (системы генератор — двигатель, Г — Д) приведена на рис 9.31. В этой системе якорь двигателя ЯД независимого возбуждения соединен с якорем генератора ЯГ независимого возбуждения, который приводится во вращение приводным двигателем ДП Обмотки возбуждения двигателя ОВД и генератора OBГ получают питание от постороннего источника постоянного тока через реостат r1 и потенциометр r2.
|
|
|
Рис. 9.31. Схема простейшей системы генератор — двигатель |
|
|
|
Рис. 9.32. Механические характеристики двигателя в системе генератор — двигатель |
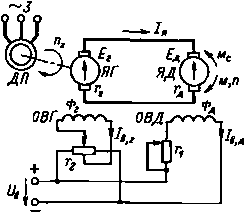
Перед пуском двигателя необходимо установить движки реостата r1 и потенциометра r2 в положения, указанные на рис. 9.31, и произвести пуск двигателяДП. При этом МДС обмотки ОВД создает наибольший магнитный поток Фд двигателя, а магнитный поток Фггенератора и, следовательно, его ЭДС Ег равны нулю. Очевидно, при этом якорь двигателя ЯД останется в покое.
Для пуска двигателя следует переместить движок потенциометра r2 из указанного положения, например, влево. Тогда возникает ток Iв,г, МДС обмотки ОВГсоздает магнитный поток Фг генератора, появляются ЭДС E1 и ток Iя. Благодаря взаимодействию тока Iя и магнитного потока Фд двигателя якорь последнего ЯДприходит во вращение.
Уравнение механической характеристики n(М) двигателя в системе Г — Д выводится аналогично уравнению (9.21) и имеет вид
(9.25)
|
n = |
Ег |
- |
М (rг + rд) |
= n0 - Δn. |
|
keдФд |
keдkMдФд2 |
Как видно, механическая характеристика n(М) представляет собой прямую линию. Вследствие небольшого суммарного сопротивления rг + rдмеханическая характеристика получается достаточно жесткой.
Регулирование частоты вращения двигателя можно производить двумя способами:
-
изменением ЭДС генератора Ег при Фд = const;
-
изменением магнитного потока Фд двигателя при Eг = const.
Второй способ регулирования частоты вращения был рассмотрен ранее, поэтому остановимся только на первом способе.
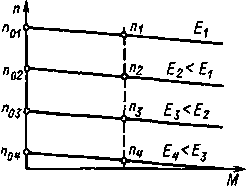
Из (9.25) следует, что при уменьшении ЭДС генератора с помощью потенциометра r2 будет изменяться только первый член уравнения, определяющий частоту вращения холостого хода n0. Второй член уравнения Δn, которым определяется изменение частоты вращения, вызванное нагрузкой, будет оставаться неизменным. Таким образом, механические характеристики при различных значениях ЭДС генератора представляют собой семейство параллельных линий (рис. 9.32) и, например, при моменте Мс оказывается возможным получить частоты вращения n1, n2, n3и n4.
Кроме широкого диапазона регулирования частоты вращения система Г — Д имеет ряд других достоинств. Одно из них состоит в том, что управление двигателем осуществляется путем воздействия на цепи обмоток возбуждения, мощности которых относительно невелики.
Если переместить движок потенциометра из указанного положения вправо, изменится направление тока Iв,г , ЭДС Eг и в итоге — напряжение вращения электродвигателя.
Используя для питания обмотки возбуждения генератора какой-либо регулируемый суммирующий усилитель (например, электромашинный, магнитный или электронный) и применив в системе обратные связи, можно дополнительно повысить жесткость механических характеристик и изменять их конфигурацию.
К основным недостаткам системы Г — Д следует отнести большое число машин, сравнительно низкий КПД, значительные габаритные размеры и высокую стоимость.
С развитием полупроводниковой техники оказалось возможным избавиться от недостатков, присущих системе Г — Д, путем использования вместо генератора с приводным двигателем полупроводникового (тиристорного) преобразователя переменного тока в постоянный с регулируемым напряжением. В системах с тиристорным преобразователем можно получить характеристики, аналогичные характеристикам систем Г — Д.
В настоящее время уже работает большое число систем с тиристорными преобразователями на различные мощности и в различных областях техники. Их число будет в дальнейшем увеличиваться.