

1.2 Формирование функциональной схемы системы. Определение передаточных функций отдельных элементов, разомкнутой и замкнутой системы по задающему и возмущающему воздействиям.
Функциональная схема — графическое изображение изделия, на котором представлены функциональные части и связи между ними с разъяснением процессов, протекающих в отдельных функциональных цепях изделия или в изделии в целом.
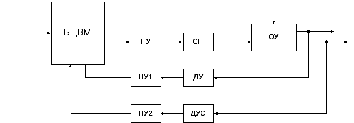
Функциональная схема контура стабилизации высоты самолета представлена на рис. 1.1.
 (t),(t),
(t),(t),
Рисунок
1.1
 Функциональная
схема системы управления БПЛА
Функциональная
схема системы управления БПЛА
На рис. 1.1 приняты следующие обозначения:
БЦВМ
 бортовая цифровой вычислительная
машина;
бортовая цифровой вычислительная
машина;
ПУ – предварительный усилитель;
СП – сервопривод;
ОУ – объект управления;
ДУ – датчик угла;
ДУС – датчик угловой скорости;
НУ1, НУ2 – нормирующие усилители;
ϑтр(t) – требуемое значение угла тангажа;
Uз(t) – сигнал на выходе задающего устройства;
UПУ(t) – сигнал на выходе предварительного усилителя;
U(t) – сигнал на выходе СУ, управляющее воздействие на СП;
δр(t)– угол отклонения руля высоты;
Mz(t) – возмущающее воздействие при продольном движении БПЛА;
ϑ(t) – полученное значение угла тангажа;
ωz(t) – угловая скорость тангажа;
UДУ(t) – напряжение на выходе датчика угла;
UДУC(t) – напряжение на выходе датчика угловой скорости;
UДУCH(t) – напряжение на выходе нормирующего усилителя НУ2.
UДУH(t) – напряжение на выходе нормирующего усилителя НУ1.
Для
обеспечения устойчивости, самолет
охвачен двухканальной отрицательной
обратной связью. В каналах обратной
связи установлены ДУ и ДУС. Датчики угла
и угловой скорости преобразуют полученные
углы тангажа и угловые скорости
 в соответствующие напряжения
в соответствующие напряжения
 ,
,
 .
Далее эти сигналы пропускают через
нормирующие усилители НУ1 и НУ2
соответственно, чтобы усилить сигнал
и предотвратить перерегулирование.
После
нормирующих усилителей сигналы подаются
в СУ.
.
Далее эти сигналы пропускают через
нормирующие усилители НУ1 и НУ2
соответственно, чтобы усилить сигнал
и предотвратить перерегулирование.
После
нормирующих усилителей сигналы подаются
в СУ.
К чувствительным элементам предъявляются следующие требования:
-линейность и однозначность статической характеристики;
-высокие чувствительность и разрешающая способность;
-стабильность характеристик во времени;
-отсутствие влияния нагрузки на статические характеристики;
-минимальная инерционность;
-минимальное влияние внешних факторов.
Выбор типа чувствительного элемента определяется требованиями по точности системы, её назначением и условиями эксплуатации.
Статические погрешности датчиков должны быть меньше требуемых точностей процессов управления. Динамические погрешности датчиков, определяемые по передаточным функциям, должны быть достаточно малы.
1.3 Формирование структурной схемы системы
Согласно функциональной схемы система управления (рис.1.2), построим структурную схему исходной системы контроля, с указанием функций переноса ее элементов и процессов, происходящих в системе.

Рисунок
1.2 Структурная
схема САУ БПЛА
Структурная
схема САУ БПЛА
На рисунке 1.2 приняты следующие обозначения:
ФИ
 формирователь импульсов;
формирователь импульсов;
НЧ непрерывная
часть;
непрерывная
часть;
ПНЧ приведенная непрерывная часть.
приведенная непрерывная часть.
При построении структурной схемы принимаются следующие допущения: все ключи работают синхронно, а в фазе (пренебрежение ошибкой); пренебрежение постепенности; сигнал считается только во время момента квантования.
Определим передаточные функции всех элементов, которые входят в состав исследуемой системы.
Передаточная функция усилителя мощности
 .
.
Передаточная функция сервопривода представлено в виде апериодического звена

Передаточная функция датчика угла

Передаточная функция ДУС
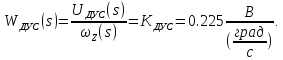
Передаточная функция объекта управления по угловой скорости

Передаточная функция объекта управления по углу тангажа

Передаточная
функция
система автоматического управления
БПЛА
по задающему
воздействию ( ):
):
-
передаточная функция разомкнутой системы


-
передаточная функция замкнутой системы

Передаточная
функция
система автоматического управления
БПЛА
по возмущающему
воздействию ( ):
):
-
передаточная функция разомкнутой системы

-
передаточная функция замкнутой системы
Для обеспечения точности было введено компоненты с пропорциальным законом управления. Для обеспечения стабильности системы управления и улучшения переходных характеристик.

Исследований и анализа функциональных свойств системы управления
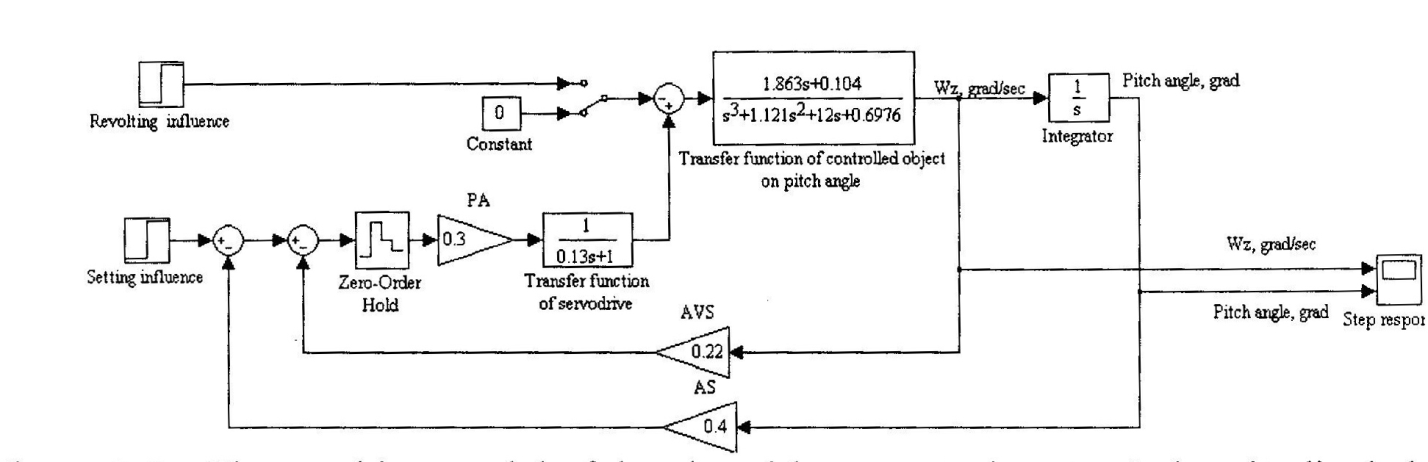
Машинная модель для анализа БПЛА замкнутой системы управления в продольном канале приведена на рис. 1.3
Рисунок
1.3
 Машинное модель системы управления в
продольном канале
Машинное модель системы управления в
продольном канале
На рис.1.4 приведены результаты моделтрования:
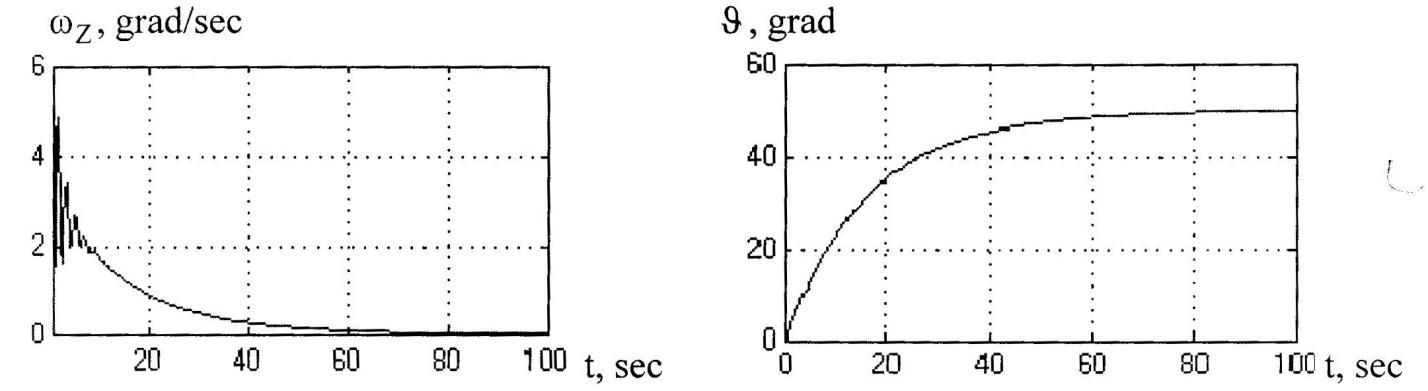
а) зависимость угловой скорости от времени
б) зависимость угла тангажа от времени
Рисунок
 1.4 Реакция замкнутой системы на ступенчатое
входное воздействие
1.4 Реакция замкнутой системы на ступенчатое
входное воздействие
Определены показатели качества системы табл.1
Таблица
1
 Показатели качества
Показатели качества
|
|
|
|
|
|
70 |
0 |
38 |
2.5 |

 ,
,


Исходя из рис. 1.4, исследованный замкнутый система в продольном канале устойчива, но ее показатели качества (в частности, установившейся время) не удовлетворяют требованиям технического задания. Поэтому он требует улучшения.
Для построения частотных характеристик, в частности ЛАЧХ и ЛФЧХ, были использованы команды Matlab: Bode - для замкнутой системы и margin - для разомкнутой системы.
Результаты полученых частотных характеристик представлены на рис.1.5
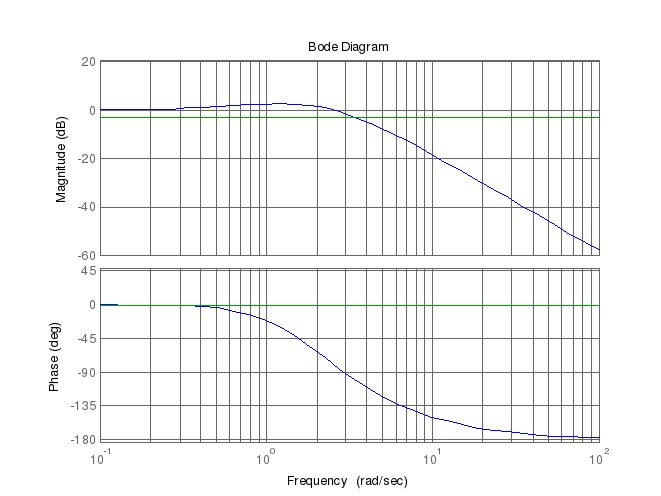
Рисунок
1.5
 ЛАЧХ и ЛФЧХ разомкнутой системы
ЛАЧХ и ЛФЧХ разомкнутой системы
Запас
по амплитуде р 16.9дБ,
а запас по фазе 89 .
.
Было построено ЛАЧХ и ЛФЧХ замкнутой системы (рис.1.6).
По полученные характеристикам можно оценить следующие показатели: колебания M = 1; пик усиления 7.96дБ.
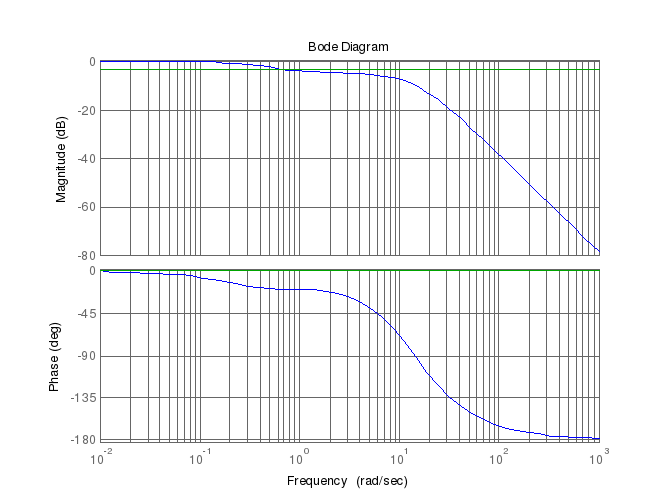
Рисунок
 1.6 ЛАЧХ и ЛФЧХ
замкнутой системы
1.6 ЛАЧХ и ЛФЧХ
замкнутой системы