

16. Математическая модель сау
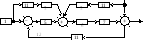
Большинство ЛСА можно привести к двум структурам, упрощенная схема которых:

а)
б)
10
На этих схемах управляющий сигнал 2 формируется в задающем устройстве З. Он сравнивается в устройстве 3 с выходными сигналами, который измеряется датчиком Д параллельно. В результате сравнения сигналов образуется сигнал разности 4, поступающий через устройство управления 5 и 6 на объект регулирования ОУ. От действия сигнала возмущения 8, поступающего в систему через сумматор 9, происходит некоторое искажение выходного сигнала 10. Замыкание системы осуществляется с помощью главной ОС 12. Если в этих рисунках исключить задатчик, то получим систему автоматической стабилизации, обрабатывающий сигнал возмущения.
Рисунок б) от а) отличается тем, что в нем для получения более высокой точности, применяются три датчика параллельно. Которые не только измеряют выходной сигнал 10, но и сигнал управления 2 и возмущения 8. Эти два сигнала после прохождения устройства 5, поступают на сумматор 13 и уменьшают влияние синтеза и анализа на ошибку ЛСА. Практически все ЛСА при решении задач синтеза и анализа сводится к этим двум схемам. При этом пользуются правилами преобразования структурных схем, выделяют линейную, нелинейную и цифровую части.
Наряду с передаточными функциями линейных элементов, используется эквивалентная передаточная функция нелинейных элементов. Для однозначных нелинейностей они совпадают с коэффициентами гармонической линеаризации.
Если система имеет сигналы на выходах и входах в векторной форме, то в ЛСА несколько входных исполнительных и корректирующих устройств.
В векторно-матричном уравнении, описываемом ЛСА, по своему описанию ничем не отличается от соответствующих уравнений объектов. Только в них входные расширенные матрицы, в которых учитывается уравнениями корректирующих и исполнительных устройств.
Так как в современных ЛСА входные управляющие ЭВМ. При необходимом для реализации численных процедур любой дискретной модели.
Для определения дискретных моделей необходимо пользоваться предварительной реализацией на ЭВМ специальные программы.
17. Математические модели нелинейных
ОБЪЕКТОВ ЛСУ
Существенные нелин. элементы – это те элементы, которые нельзя аппроксимировать касательной с малой погрешностью в некоторой окрестности близкой к рабочей точке. К ним относятся: ступенчатые, кусочно-линейные и многозначные функции с точками разрыва первого рода, а также степенные и транстендентые функции.
Для математического описания таких нелинейностей применяют эквивалентные передаточные функции, зависящие от коэффициентов линеаризации, которые получают путем минимизации среднего квадрата ошибки воспроизведения заданного входного сигнала. Форма входных сигналов, поступающих на вход нелинейностей, может быть произвольна. На практике наибольшее распространение получили гармонические и случайные виды входных сигналов и их временные комбинации. Соответственно и методы линеаризации называются гармоническими и статическими.
Весь
класс существенных нелинейностей
разделен на две группы. К 1ой
группе относятся однозначные нелинейности,
у которых связь между входными
![]() и выходными
и выходными![]() сигналами, зависит только от формы
статической характеристики нелинейности
сигналами, зависит только от формы
статической характеристики нелинейности![]() .
.
![]() .
.

В
этом случае, при определенной форме
входных сигналов:
![]() ,
с помощью матрицы линеаризации
,
с помощью матрицы линеаризации![]() можно найти приближенное значение
выходных сигналов:
можно найти приближенное значение
выходных сигналов:![]() .
.
Следует, что матрица коэффициентов линеаризации однозначных нелинейностей, является действительной величиной и ее эквивалентная передаточная функция:
![]() (V)
(V)
Ко второй группе относят двузначные (многозначные) нелинейности, у которых связь между входными и выходными сигналами зависит не только от формы статической характеристики, но так же определяется предысторией входного сигнала.
![]() .
.

– Двузначная нелинейность
Для учета влияния предыстории входного сигнала будем учитывать не только сам сигнал х, но и скорость его изменения, дифференциал х1.
При
входных сигналах:
![]() приближенное значение входного сигнала
будет:
приближенное значение входного сигнала
будет:
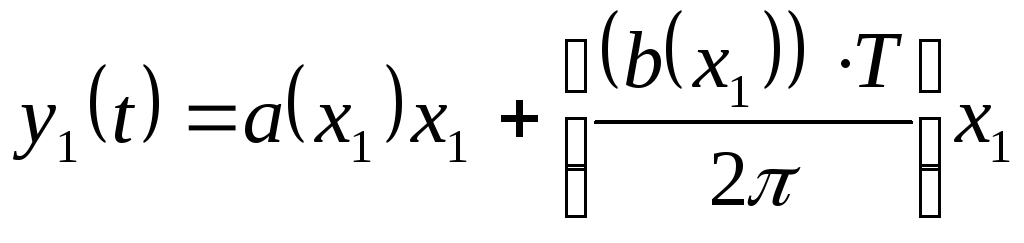 (W)
(W)
где а(х1) и b(х1) – матрицы коэф. гармонической линеаризации
двухзначных нелинейностей;
T – период колебания по правой гармонике;
х1(t) – гармоническая функция.
Эквивалентная передаточная функция:
![]() .
.
Существуют нелинейности более общего вида:
![]() (1)
(1)
![]() (2)
(2)
где
![]() и
и![]() – коэффициенты гармонической
– коэффициенты гармонической
линеаризации;
k – номер гармоники.
Матрицы коэффициентов линеаризации является периодической с периодом T. Имея это в виду, передаточную функцию двух двухзначной нелинейности (1), можно представить по аналогии с передаточной функцией (2):
![]() (N)
(N)
Пользуясь (V), (W) и (N) определим обобщенную формулу для вычисления передаточной функции однозначных и двухзначных нелинейностей.
В случае однозначной нелинейности матрица коэффициентов линеаризации a, зависящая от параметров вектора х1(t), выбирается, таким образом, чтобы линеаризовать среднее значение квадрата разности между точным y и приближенным y1(t) сигналами на входе:
![]() ,
,
где «черта сверху» – это силовое усреднение.
![]() .
.
После
преобразований, упрощений, ухищрений
и усыпления бдительности, получим
эквивалентную передаточную функцию в
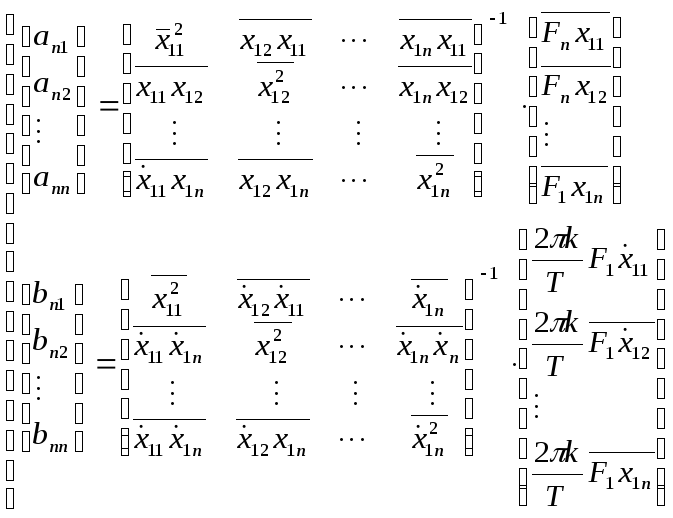
виде системы матриц:
![]() ,
,![]() .
.
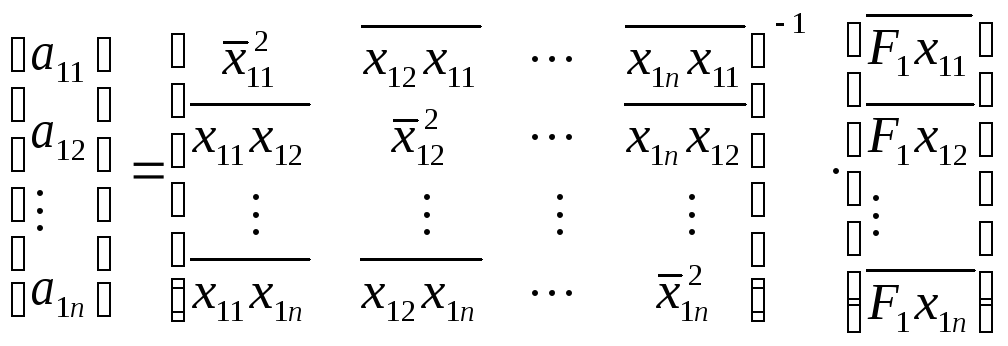 (3)
(3)
![]()
![]()
![]()
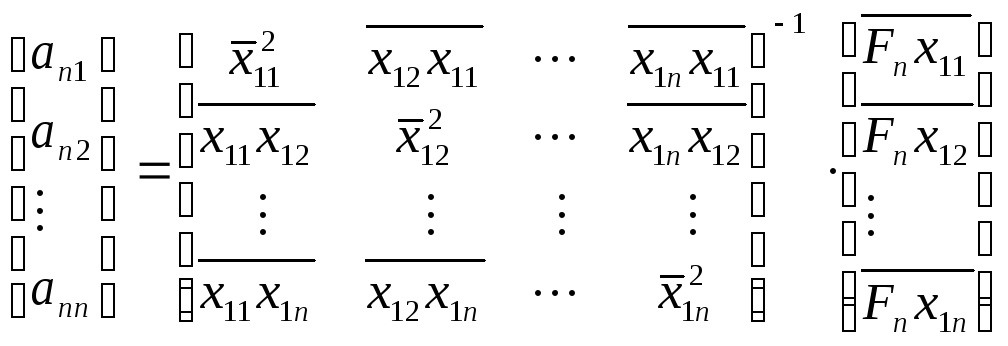 (4)
(4)
Пример. Определить коэффициент линеаризации для однозначной нелинейности, когда на ее вход поступает первая гармоника синусоидального сигнала:
![]() (5)
(5)
где
![]() ,
то коэф. линеаризации
,
то коэф. линеаризации
![]() (6)
(6)
ур-ие
представляет собой коэффициент
линеаризации по 1ой
гармонике для однозначной нелинейности,
она определяет эквивалентную передаточную
ф-цию
![]() .
.
В дальнейшем сравнение формулы для определения коэффициентов линеаризации простейших нелинейностей при подаче на их вход периодических сигналов: синусоидального, треугольного, покажем целесообразность применения получаемых эквивалентных передаточных функций.
Перейдем к распространению обобщенного метода описания коэффициентов линеаризации на двухзначные нелинейности.
В этом случае, учитывая соотношение (1) и (2), можно записать:
![]() (7)
(7)
 (8)
(8)
Коэффициент
линеаризации определим выражением (8),
![]() ,
,![]() .
.
 (9)
(9)