

22. Особенности анализа и синтеза следящих
СИСТЕМ И СИСТЕМ ПРОГРАММНОГО УПРАВЛЕНИЯ
Он состоит в выборе структуры и параметров системы регулирования объектом, который в соответствии с заданными техническими условиями обеспечивает наиболее рациональные характеристики по запасам устойчивости, показателям качества и точности. При проектировании необходимо учитывать множество дополнительных факторов: надежность, массу, габариты, стоимость, возможность работы при вибрации в агрессивных средах, при значительных перепадах температуры и влажности.
Задачу синтеза можно решить двумя методами:
1) Если известна только динамика объекта, то выбирают
структуру и параметры регулятора или следящей системы.
2) Если одновременно с объектом задана структура регулятора
и динамические характеристики привода исполнительных
устройств, то в этом случае находят усилительные и кор–
ректирующие устройства системы.
В непрерывных ЛСА используют КУ на база RC-цепочек и дополнительных усилителей. При этом применяют последовательные, параллельные и последовательно параллельные КУ.
Последовательное КУ вызывает повышение частоты среза системы, а, следовательно, увеличение влияния случайных сигналов и при их использовании требуются двигатели большой мощности, для управления исполнительными органами.
Параллельное КУ, наоборот, вызывают снижение частоты среза ЛСА и делают ее мало чувствительной к помехам и фиксациям. Корректирующие устройства данного типа уменьшают влияние нелинейности во внутренних контурах системы, однако, их включение сокращает запасы устойчивости во внутренних контурах. Для устранения этих недостатков применяют одновременно параллельное и последовательное корректирующее устройство.
В современных непрерывно дискретных и дискретных ЛСА средства формирования запасов регулирования КУ реализуется в виде программ на управляющих ЭВМ и МП.
Синтез дискретно непрерывных систем
При синтезе этих систем принципиальная функциональная схема должна быть полностью задана. В процессе проектирования необходимо найти законы регулирования, которые можно реализовать в виде последовательного, параллельного и последовательно параллельно КУ, создаваемого различными способами.
 В
дискретно непрерывных системах необходимо
выбирать не только параметры процессов
ЭВМ, но и преобразователи аналог вход
и аналог выход.
В
дискретно непрерывных системах необходимо
выбирать не только параметры процессов
ЭВМ, но и преобразователи аналог вход
и аналог выход.
Значительное влияние на запас устойчивости, показатели качества и характеристик точности в таких системах оказывает такт квантования и ограниченная длина слова.
Существует несколько различных структур, предназначенных для поддержания заданной угловой скорости дискретно непрерывных систем с последовательно параллельными КУ в виде импульсных фильтров, создаваемых на основе четырехполюсников.
E*(S)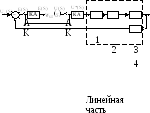
1
2
3
4
WКП(Z)
Рис. 1. С последовательным КУ
1
2
3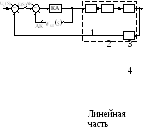
E*(S)
4
Р
1
2
3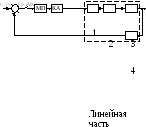
E*(S)
4
Рис. 3. С программным корректированием
Выходной сигнал поступает лишь в тактовые моменты времени kT0, где k = 0, 1, 2, … .
В МП реализовано вычислительная или регулированная система в виде рабочей программы. На вход МП подается сигнал от преобразователя аналог-вход, выходной сигнал в виде рабочей программы управления и коррекцией через преобразователь вход-аналог поступает на неизменяемую часть системы.
Рабочая программа осуществляется в течение такта квантования.
С помощью приведенной схемы выполняется различные операции регулирования и коррекции по специальной составленной программе.
Если в системе необходимо изменить параметры устройств неизменяемой части или ее основные характеристики, для этого требуется изменить рабочую программу. Поэтому с помощью микропроцессорного управления можно создать унифицированную локальную схему для управления любыми объектами.
В ДПС переводит аналоговый сигнал с помощью двух операций, квантами по уровню.
В настоящее время наибольшее распространение получили преобразователи следующих типов напряжения в цифры. Квантование по уровню оказывает влияние не только на точность системы, но и на устойчивость.
![]() –длина
слова в битах.
–длина
слова в битах.
![]() –математическое
значение ошибки квантования,
–математическое
значение ошибки квантования,
![]() –средне
квадратичное отклонение.
–средне
квадратичное отклонение.
Квантователь является нелинейным элементом, поэтому в замкнутых системах могут вернуть автоколебания.
В линии управляющих машин в качестве устройств, на которых реализуются законы управления и коррекции требуется установление рабочих программ.
При этом используют 4 способа программирования:
1. Прямое программирование.
2. Последовательное программирование.
3. Параллельное программирование.
4. Последовательно параллельное программирование.
Передаточную функцию системы можно записать в следующем виде:
 (184)
(184)
При прямом программировании определяется разностное уравнение по передаточной функции вида (184), которое принимает следующий вид:
![]() (185)
(185)
![]() (186)
(186)
Последовательное программирование
Здесь передаточную функцию приводят к следующему виду:
 (187)
(187)
Параллельное программирование
При параллельном программировании передаточная функция преобразуется в вид:
![]() (188)
(188)
![]() (189)
(189)