

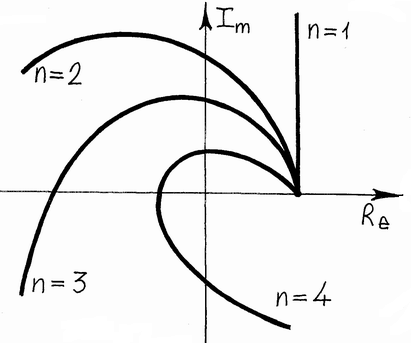
12. Графические критерии устойчивости сау
– Критерий МИХАЙЛОВА
Данный метод используется для исследования устойчивости замкнутой системы.
Согласно данному критерию для того, чтобы САУ была устойчивой необходимо и достаточно, чтобы при изменении ω от 0 до + ∞ вектор, начав движение из точки лежащей на положительной вещественной полуоси комплексной плоскости, вращаясь против часовой стрелки и нигде не обращаясь в ноль , обошел последовательно столько четвертей комплексной плоскости какова степень характеристического уравнения.
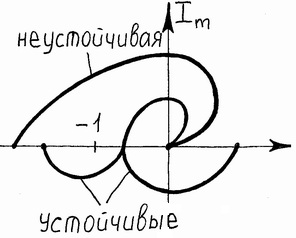
– Критерий НАЙКВИСТА
Если
СУ устойчива в разомкнутом состоянии,
то для того, чтобы она была устойчива в
замкнутом состоянии, необходимо и
достаточно, чтобы кривая АФЧХ
![]() разомкнутой системы при измененииω
от 0 до ∞
не охватывала точку
разомкнутой системы при измененииω
от 0 до ∞
не охватывала точку
![]() .
.
– D–разбиение
13. Выбор и обоснование каждого звена лсу
Из выше рассмотренных критериев (ТЗ, элем-ый, метрологический, энергетический, врем-ой, разделит. синтезы) основными являются все, но есть особенности: в элементном синтезе не допускаются нарушения размерности, а метрологический, энергетический, временной и разделительный синтез являются альтернативными.
14. Математическая модель каждого звена
Все математические модели делятся на два класса:
– Элементы с сосредоточенными параметрами (ССП) – если
быстродействие звена на 1-2 порядка превышает быстродей–
ствие объекта управления;
– Системы с распределенными параметрами (СРП) – если в
звене есть врем запаздывания, соизмеримое с постоянной
времени объекта управления.
В нашем примере к СРП могут быть отнесены редуктор, электродвигатель, лента конвейера.
Для математической модели наиболее часто применяются дифференциальные, интегрально-дифференциальные уравнения, записанные по координатой или векторно-матричной форме.
Динамические элементы относятся к непрерывным, если рассматриваются в них процессы и сигналы изменяются непрерывно.
В дискрет. элементах процессы и системы имеют конечное число значений по величине и времени.
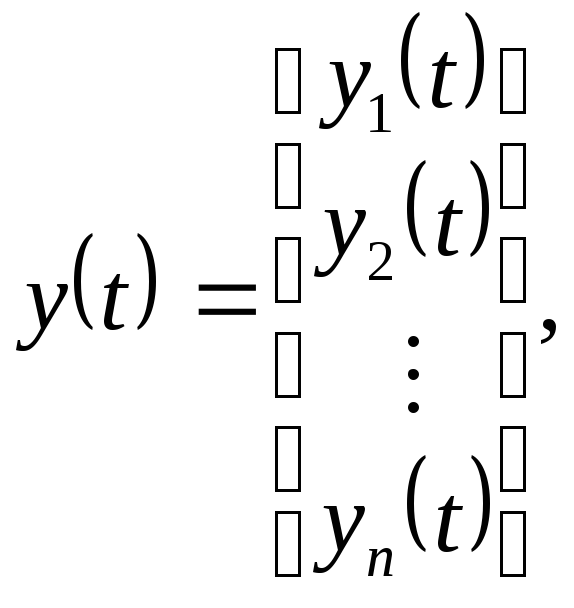
Математическое описание элементов удобно выполнить через переменные состояния. Они аналогичны обобщенным координатам, а пространство их изменения является фазовым.
Обычно при описании элементов непрерывного действия используют:
![]() –переменное
состояние;
–переменное
состояние;
![]() –выходной
сигнал;
–выходной
сигнал;
![]() –входной
сигнал.
–входной
сигнал.
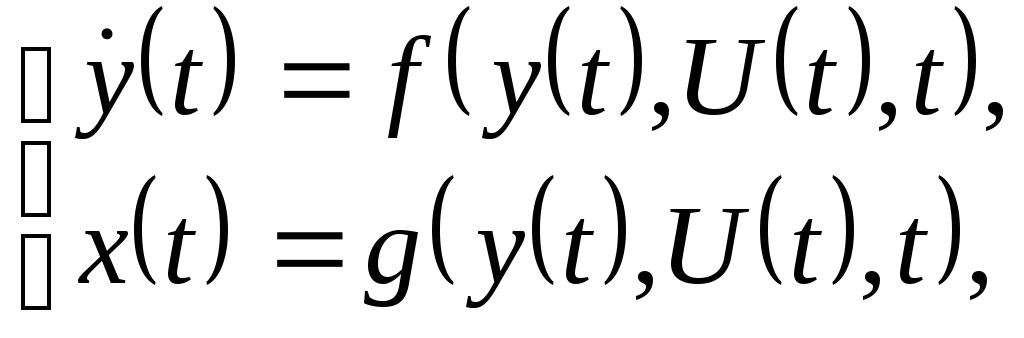 (1)
(1)


Система (1) справедлива на заданном интервале времени от t0 до t и при заданных начальных условиях y(t0), u(t0).
Система (1) считается нелинейной, если кроме нелинейных состояний y(t), есть их производные степени и транспортной функции (экспоненты, обратные ф-ции тригонометрическим).
Пример № 1. Рассмотрим ур-ие устр-ва д/замера угловых
скоростей на выходе вала двигателя внутреннего
сгорания.
![]() ,
(11)
,
(11)
где m – масса устройства,
l – перемещение устройства,
![]() –коэффициент
скоростного терния,
–коэффициент
скоростного терния,
![]() –коэффициент
жесткости пружины,
–коэффициент
жесткости пружины,
ω – угловая скорость выходного вала,
k – коэффициент пропорциональности при угловой
скорости.
Обозначим:
![]() ,
,
![]() ,
,
Получим:
– мат.
модель
выходного
вала.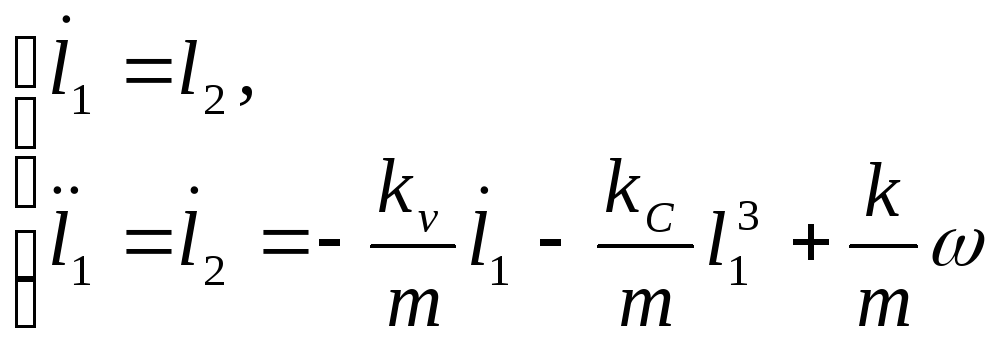
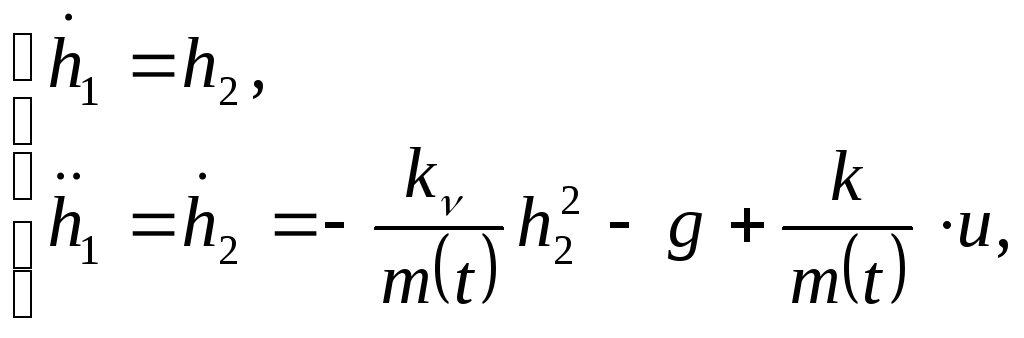
Пример № 2. Рассмотрим ур-ие вертикально стартующей вверх ракеты под действием силы тяги двигателя.
![]() ,
(4)
,
(4)
(4) – уравнение не линейное и не стационарное.
где h – высота подъема,
k – коэффициент пропорциональности,
![]() –коэффициент
трения,
–коэффициент
трения,
g – ускорение свободного падения.
Ведем следующие обозначения:
![]() ,
,
![]() .
.
 ,
,
Причем
![]()
При описании элементов дискретного действия в общем виде используют уравнения:
 (18)
(18)


 ,
,
 .
.
Система ур-ий используется в тех случаях, когда не задан такт квантования дискрет. элемента.
Если известно t0 и такт квантования, то
