

Гармоническая линеаризация типовых нелинейных элементов
Классическая – предлагает, что сигнал, снимаемый с выхода нелинейности, является периодическими и имеют основную частоту с частотой синуса входного сигнала. В результате этого допущения при нахождении эквивалентных передаточных функций или коэффициентов гармонической линеаризации учитывают только первую гармонику, а влияние высших корней пренебрегают. Это справедливо для систем, линейная часть которых является низкочастотной и подавляет колебание высоких частот.
Пусть на вход однозначной нелинейности поступает сигнал:
![]() .
(69)
.
(69)
Тогда выходной сигнал:
![]() .
(70)
.
(70)
Или
![]() .
(71)
.
(71)
Запишем выражение (71) через коэффициенты гармонической линеаризации.
![]() ,
(72)
,
(72)
![]() ,
(73)
,
(73)
![]() ,
(74)
,
(74)
![]() .
(75)
.
(75)
Коэффициент гармонической линеаризации однозначной нелинейности представляет собой коэффициент усиления, определяемый отношением амплитуды первой гармоники выходного сигнала к гармонике входного сигнала.
При гармонической линейности двузначной нелинейности, выходной сигнал имеет вид:
![]() ,
(76)
,
(76)
где
![]() - сдвиг фазы, зависящий от величины
амплитуды входного сигнала.
- сдвиг фазы, зависящий от величины
амплитуды входного сигнала.
![]() ,
(78)
,
(78)
![]() ,
(79)
,
(79)
![]() ,
(80)
,
(80)
![]() (81)
(81)
![]() ,
(82)
,
(82)
![]() ,
(83)
,
(83)
![]() ,
– эквивалентная функция.
(84)
,
– эквивалентная функция.
(84)
![]() ,
(85)
,
(85)
![]() ,
(86)
,
(86)
![]() .
(87)
.
(87)

Рисунок 17

Рисунок 18
 ,
(88)
,
(88)
![]() .
.

Рисунок 19
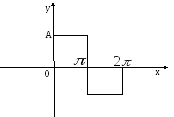
Рисунок 20
у
b

х
-b
Рисунок 21
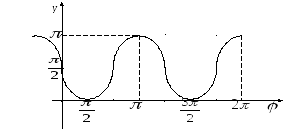
Рисунок 22
Ш аблоны
аблоны
Рисунок 23