

Международный университет природы, общества и человека «Дубна»
Кафедра «Персональной электроники»
Курсовая работа
по дисциплине
«Основы автоматических систем управления»
Тема: «Система управления температурой воздуха в жилом помещении»
Выполнил студент группы 4141
Щипунов Андрей Валентинович
Проверил: Трофимов Александр Терентьевич
Дубна, 2007
Оглавление
Оглавление 2
Определение целей управлении. Выбор переменных, подлежащих управлению. Формулировка требований к этим переменным. 3
Выбор конфигурации системы и исполнительного устройства. 3
Получение моделей объекта управления, датчика и исполнительного устройства. 4
Построение модели исполнительного устройства 4
Построение переходной характеристики объекта управления 5
Построение переходной характеристики всей системы 6
Оценка устойчивости системы 8
Анализ установившейся ошибки 11
Выводы 12
Определение целей управлении. Выбор переменных, подлежащих управлению. Формулировка требований к этим переменным.
В настоящее время широкое распространения получают системы интеллектуального здания и интеллектуального офиса. Эти системы позволяют облегчить жизнь человека и сделать более комфортной. Такие системы содержат некоторое количество подсистем, например: система управления освещением, система управления температурой, система управления пожаротушением и многие другие системы. Целью данной курсовой работы является построение модели системы управления температурой в интеллектуальном здании.
В данной курсовой работе будет разработана модель устройства, которое будет повышать температуру воздуха. Охлаждение же воздуха будет происходить естественным путём. В качестве нагревательного прибора выберем батарею, поступление горячей воды в которую будет регулироваться заглушкой. Положением заглушки управляет электродвигатель. То есть для изменения температуры воздуха в помещении надо управлять напряжением на электродвигателе. Таким образом, переменной управления является входное напряжение на электродвигателе, а объектом управления является воздушная среда в помещении.

Рис.1. Функциональная схема системы.
Выбор конфигурации системы и исполнительного устройства.
Система состоит из усилителя, электродвигателя и датчика термопары. На вход усилителя через сравнивающее устройство подаётся сигнал, содержащий информацию о желаемой температуре воздушной среды в помещении. В усилителе сигнал усиливается до нужной величины и подаётся на вход электродвигателя. В зависимости от амплитуды сигнала двигатель поворачивает заглушку на определённую величину, регулируя тем самым поток горячей воды в нагревательный элемент (в данном случае в батарею).
В качестве исполнительного устройства выберем электродвигатель, управляемый по цепи якоря. Структурная схема такого двигателя приведена на рисунке 2. Передаточная функция двигателя, управляемого по цепи якоря записывается следующим образом:
![]() (1)
(1)
где Km — коэффициент передачи двигателя, J — момент инерции заглушки, управляемой двигателем, b — коэффициент трения, R — сопротивление якоря, L — индуктивность якоря.
Рис. 2. Структурная схема двигателя, управляемого по цепи якоря.
Получение моделей объекта управления, датчика и исполнительного устройства. Построение модели исполнительного устройства
По известной передаточной функции в ИКС MATLAB построим модель исполнительного устройства. Само устройство состоит из усилителя с коэффициентом усиления Ka, электродвигателя и ним заглушки, связанной с двигателем через редуктор, управляющей потоком горячей воды в батарею. Параметры исполнительного устройства приведены в таблице 1.
Табл.1. Параметры исполнительного устройства.
|
Параметр |
Обозначение |
Значение |
|
Момент инерции заглушки |
J |
150 Н∙м∙с2/рад |
|
Коэффициент трения |
b |
50 кг/м/с |
|
Коэффициент усиления |
Ka |
1000 |
|
Сопротивление якоря |
R |
2000 Ом |
|
Коэффициент передачи двигателя |
Km |
1,2 Н∙м/А |
|
Индуктивность якоря |
L |
1 мкГн |
|
Передаточное число шестерёнчатого редуктора |
n |
0,01 |
Выражение (1) для передаточной функции электродвигателя можно представить в следующем виде:
![]()
где τL = J/b = 3 с, τ = L/R = 1 мс. Так как τ << τL, можно пренебречь величиной τ. Тогда
![]()
а с учётом редуктора получим
![]()
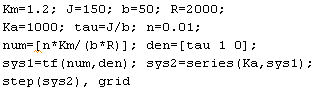
Рис.3. Скрипт построения переходной характеристики исполнительного устройства.
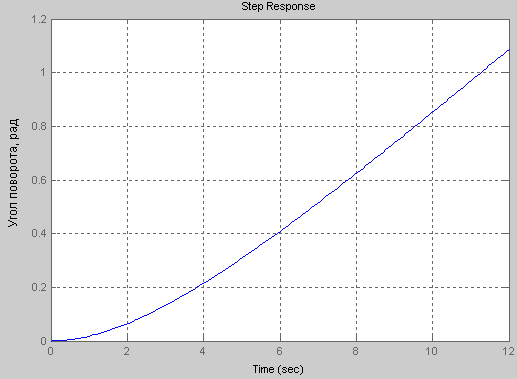
Рис.4. График переходной характеристики исполнительного устройства.