

Построение переходных процессов с помощью импульсных переходных функций
В случае действия ЛСА управляющего или возмущающего воздействия сложных форм, удобно пользоваться зависимостями, связывающими значение импульсной переходной функции замкнутой системы кз(t) с вещественной R(ω) и линейной S(ω) частными характеристиками:
|
|
|
|
|
j kз t e j tdt |
|
|
||
0 |
|
|
|
|
|
|
|
S kз t sin tdt |
|
j R jS |
R kз t cos tdt |
|||
|
|
|
0 |
0 |
|
|
|
|
|
n |
|
|
n |
|
R |
k |
t cos tdt |
R ki t sin tdt |
|
|
|
|||
i |
|
i 0 0 |
|
|
i 0 |
0 |
|
|
|
Исследование динамической точности непрерывных и дискретно-непрерывных ЛСА
Динамическая точность ЛСА определяется ошибками, возникающими в системе от действия управляющих и возмущающих воздействий.
Ошибки от случайного воздействия определяются не мгновенными значениями, а её средними квадратическими отклонениями.
Характеристики точности непрерывных ЛСА при действии регулярных сигналов
Точность ЛСА при действии медленно – меняющихся регулярных сигналов определяется коэффициентом ошибок, которые можно получить разложением передаточной функции замкнутой системы относительно ошибки в ряд Макларена.
Неподвижное состояние
В качестве типового режима рассматриваются устойчивые состояния при постоянных значениях |
|
управляющего и возмущающего воздействия. |
|
Ошибка системы в этом случае называется статической. |
22 |
|
|

|
|
g0 |
|
|
|
xст |
|
|
|
|
|
|
|
|
|||
|
1 W |
p p 0 |
|||
xст/ |
g0 |
|
// |
||
|
|||||
1 k |
|
xст |
|||
|
l |
|
|
|
|
|
Wk p fk 0 |
|
x/ |
x// |
|
|
k 1 |
|
|||
1 W p |
|||||
|
|
ст |
ст |
||
|
|
||||
|
|
|
|
|
|
|
|
p 0 |
|
|
1 f10
1 k
где l – число возмущений g0 – управление
fk0 – возмущение
Движение с постоянной скоростью
g(t)=υ(t); υ=const.
xуст |
|
xст xc xст |
D ki |
|
|
|
|
|
|||||
h |
|
|
– добротность по скорости. |
||||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
xc |
|
|
|
||
|
|
|
Движение с постоянным ускорением |
|
|
|
|||||||
E const |
g t |
t 2 |
xуст |
|
xст |
xy xст D k |
|
|
– добротность по ускорению. |
||||
|
|
|
2 |
k |
|
||||||||
|
|
|
xy |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Движение по синусоидальному закону |
|
|
||||||||
|
|
|
|
|
|
||||||||
g t gmax sin k t |
xmax |
gmax |
|
|
A k |
|
|||
|
|
Изображение ошибки:
x p x p G p 1 GWp p
где A(ωk) – модуль частотной ПФ разомкнутой ЛСА.
При ω=ωk.
Если управляющая функция времени g(t) имеет произвольную форму, но достаточно главную, чтобы иметь
m производных вида: |
dg |
; d |
2 |
g |
;.....; d |
m |
g |
|
|
||||||
|
|
|
|
|
|
|
|
|
dt |
dt 2 |
dt m |
||||
где Φх(р) – ПФ замкнутой системы по ошибке, |
23 |
G(р) – изображение управляющего воздействия. |
Разложим ПФ по ошибке в ряд по возрастающим степеням Р:
|
C1 p |
C2 |
p |
2 |
|
C3 |
p |
3 |
|
|
p |
|
x p C0 |
2! |
|
3! |
|
... G |
|||||||
|
|
|
|
|
|
|
|
|
|
|||
xуст C0 g t C1 |
dg t |
C2 |
d 2 g t |
..., |
|
|||||||
|
|
|||||||||||
|
|
dt |
|
|
2! |
|
dt2 |
|
|
|||
Переходя к оригиналу, получаем формулу для установившейся ошибки:
C0 x p p 0 ,C1 |
d x p |
d m x p |
|||||
|
|
|
,...Cm |
|
|
|
|
dp |
dp |
m |
|||||
|
|
p 0 |
|
|
p 0 |
||
где С0, С1, Ст - коэффициенты по ошибке. Их определяют согласно общему правилу расположение в ряд Тейлора.
В системах с астатизмом 1-го порядка: C0=0,
С1=1/kυ.
2-го порядка: С0=0, С1=0, С2=1/kε.
При исследовании ошибки от возмущающего воздействия можно получить все коэффициенты ≠0 при астатизме любого порядка, т.к. астатизм по управляющему воздействию может соответствовать наличию статической ошибки по возмущению.
24
Определение характеристик точности дискретных и дискретно-непрерывных ЛСА
|
|
|
|
E kT0 C0 g kT0 C1 |
|
|
g kT0 |
|
C2 |
g kT0 |
|
C3 |
g kT0 ... |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
1! |
|
|
|
|
2! |
|
3! |
|
||||
|
|
|
|
|
|
|
|
x p |
|
|
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
1 Wраз p |
|
|
|
|
|
|||||||||
C |
|
0 |
C1 |
1 |
d |
p |
C2 |
|
d |
2 |
x p |
|
|
|
|
|
||||||
0 |
|
x |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
h |
|
dp |
2 |
|
|
|
dp |
2 |
|
|
|
|
|||||||
|
|
|
|
|
p 0 |
|
|
|
|
|
p 0 |
|
|
|
|
|||||||
Синтез ЛСА
Состоит в выборе структуры и параметров системы регулирования объектов, которые в соответствии с заданными ТУ обеспечивают наиболее рациональные характеристики по запасам устойчивости, показателям качества и точности.
Задачу синтеза можно решить 2-мя методами:
-если известна только динамика объекта, то выбирают структуру и параметры регулятора (или следящей системы).
-если одновременно с объектом задана структура регулятора (следящей системы) и динамические характеристики привода ИУ (неизменная часть), то в этом случае находят усилительное и
корректирующее устройства системы.
Последовательные КУ вызывают повышенные частоты среза системы, и, следовательно, увеличивается влияние случайных сигналов, и при их использовании требуются двигатели большой
мощности для управления исполнительными органами.
Параллельные КУ наоборот, снижают частоту среза fср ЛСА и делают её малочувствительной к
флуктуациям и помехам КУ данного типа, уменьшают влияние нелинейности во внутренних контурах системы.
Для устранения этих недостатков применяют одновременно последовательные и параллельные КУ. В современных дискретных и дискретно – непрерывных ЛСА средства формирования запаса
регулирования и КУ реализуются в виде рабочих программ на управляющих ЭВМ и МП. |
25 |
|

Дискретно-непрерывные линейные и нелинейные системы.
Рассмотрим прямое программирование: |
U1 z |
|
b0 b1 z |
1 b22 z |
2 ... bnn z n |
|
W z U z |
|
1 a1 z 1 |
a2 z 2 |
... am z m |
При прямом программировании по передаточной функции определяем разностное уравнение
n |
m |
|
U1* z bkU * t kT0 |
akU * t kT0 |
|
|
|
|
k 0 |
k 1 |
|
U2* t |
U3* t |
|
Строится структурная схема программирования:
U*(t) |
1 |
U*(t- |
2 |
U*(t-2T0) |
3 |
U*(t- |
|
|||||
|
T0) |
|
|
|
|
mT0) |
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
e- |
|
|
|
e- |
|
|
|
e- |
|
|
|
b |
STo |
|
b |
STo |
|
b |
STo |
b |
|
|||
|
|
|
|
|
|
|||||||
0 |
|
|
1 |
|
|
2 |
|
m |
|
|||
|
|
|
|
|
|
|
|
|
|
|
U2*(t) |
e*p(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U3*(t) |
|
|
|
|
1 |
a |
|
|
2 |
a |
|
n |
a |
|
|
|
|
|
|
|
|
|
|
|
|||
e*p(t) |
e- |
|
|
|
e- |
|
|
|
e- |
|
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
|
|
U |
*(t-T ) |
U |
*(t-2T ) |
U |
*(t-nT ) |
|
|||||
|
|
|
|
|
||||||||
|
|
1 |
|
0 |
|
1 |
|
0 |
|
1 |
0 |
26 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Последовательное программирование.
|
|
|
W1 z |
W2 z |
Wn z |
|
|
|
||
U1 z |
|
|
|
|
|
|||||
1 |
1 e1 z 1 |
1 en z n |
|
|||||||
W z |
|
|
|
1 d2 z 1 |
... 1 dm z m |
|
|
|||
U z |
1 d1 z 1 |
|
||||||||
При параллельном программировании: |
|
W1 z |
W2 z |
|
W3 z |
Wn z |
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
W z |
P1 |
P2 |
|
P3 |
Pn |
||
|
|
|
|
1 d2 z 1 |
1 d3 z 1 |
... 1 dm z 1 |
||||
|
|
|
1 d1 z 1 |
|||||||
U1(z)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W1(z) |
|
W2(z) |
|
W3(z) |
||
|
|
|
|
|
|
|
2) Делаем сдвиг на (z-1)
~ |
|
|
|
1 |
~ |
|
|
|
|
U z |
|
0,05z 0,04 |
z |
z |
|
|
|
||
|
|
U |
|
z |
|
||||
Wky z U z |
0,06z2 0,03z 0,01 z |
1 U |
|
||||||
|
|
|
|
|
|
|
|
|
|
Если есть Wky(jλ)=, то можем составить
программу коррекции.
1) Производим обратно билинейное
преобразование: |
|
|
Wn(z) |
|
|
0,05z2 0,04z 1 |
||
Wky j Wky z 0,06z3 |
0,03z2 |
0,01z 1 |
U(z) |
|
|
Запишем разностное уравнение в масштабе реального времени
~ |
~ |
~ ~ |
Uky z 0,06Uk 2 |
0,03Uk 1 0,01Uk Uk 1 0,05Uk 1 |
0,04Uk Uk 1 |
27

Расчёт ПФ двигателя.
|
|
W S |
|
|
k |
|
|
|
|
|
|
|
|||
|
|
S T02 S 2 2T 2 S 1 |
|
|
|
|
|||||||||
Электрический |
|
kM |
|
|
|
|
|
|
|
|
|
|
Ra Jn Ra k Tg |
|
|
k |
T |
J A RaTg |
|
|
|
|
|
||||||||
|
Ra k km ke |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
R k k |
|
k |
|
|
2 Jn RaTg Ra k kmke |
|
||||||||
|
|
|
|
|
m |
e |
|
||||||||
|
|
|
|
|
|
a |
|
|
|
|
|||||
km – моментальная постоянная электродвигателя
Ra – сумма сопротивлений обмоток якоря электродвигателя, соединительных проводов и выходной
цепи электромагнитного усилителя kν – коэффициент вязкого трения
ke – постоянная противо-эдс
Jn – приведённый к валу двигателя момент инерции вращающихся частей и исполнительного
механизма |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Tg=La/Ra – электромагнитная постоянная якоря |
|
|
|
|
|
|||||||||||
Ra – омическое сопротивление |
|
|
|
|
|
|
|
Jnky E Vk |
|
|||||||
L |
a |
– индуктивное сопротивление |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
k |
|
k |
|
|
|
VJn |
|
|
|
|
|
|
Гидравлический |
k |
|
|
n |
|
гд |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||||
|
|
T |
|
2 VE Jn kгд2 k ky |
|
|||||||||||
|
|
|
kгд2 k k y |
|
|
|
|
|||||||||
|
|
|
E kгд2 k ky |
|
|
|
||||||||||
kn – постоянная гидравлической помпы |
|
kгд – постоянная гидродвигателя |
|
kω – коэффициент жидкостного трения |
|
ky – коэффициент, характеризующий утечки гидравлического привода |
|
V –объём рабочей жидкости в цилиндре при нормальном давлении |
|
E – модуль объёмной упругости |
|
Jn – приводимый к валу двигателя момент инерции всех вращающихся частей |
28 |
|

Пневматический двигатель
|
k |
|
|
|
|
|
|
nP10 L X n0 P20 X n0 |
|
||||
|
|
|
|
|
|
|
2 Fn mX n0 L X n0 |
|
|||||
|
|
|
||||
|
|
|
|
|
|
|
|
n 1 |
|
|
|
|
|
|
|
P |
n |
|
|||
|
P |
1 |
|
|
|
10 |
|
|
||
|
|
P |
|
|||||||
|
10 |
|
|
|
|
|
||||
k |
|
|
|
|
|
0 |
|
|
||
nP0 |
|
|
|
nP20 |
|
|
||||
|
|
|
|
|
||||||
|
X n0 |
|
|
L |
X n0 |
|
||||
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
n |
|
|
|
|
|
|
P |
|
n |
|
P |
|
|||||
|
|
|
|
|
|
n |
|
||||||||
|
P |
|
|
|
a |
|
|
|
20 |
|
|
|
|
||
|
P |
P |
|
||||||||||||
20 |
2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
20 |
|
|
|
|
a |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
nP0 |
|
|
|
nP20 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
X n0 |
|
L X n0 |
|
|
|
|||||||
|
|
|
|
|
||
T |
mX n0 L |
X n0 |
|
|||
Fn nP10 |
L |
X n0 |
nP20 X n0 |
|
||
|
|
|
||||
P10 – установившееся давление в 1-ой и 2-ой полостях силового цилиндра P0 – давление воздуха в резервуаре
Pa – атмосферное давление окружающей среды Xn0 – величина перемещения поршня
L – длина силового цилиндра за вычетом толщины поршня n – показатель политропы
λ1, λ2 – постоянные привода Fn – площадь поршня
m – масса поршня, штока и подвижных частей исполнительного механизма
kν – постоянная скоростного трения |
|
|
|
|
|
Jn |
|
Jn – момент инерции на валу двигателя, |
|
Передаточное соотношение редуктора: i |
|
|||
|
|
J g |
|
Jg – момент инерции объекта управления. |
|
|
|
|
|
Привод будет согласован с нагрузкой при следующих номинальных параметрах.
M n 2E |
|
|
|
|
|
|
||||
|
Jn Jg |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Jn |
|
|
|
|
|
||
n m |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
J g |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
W 2 |
m |
E |
m |
J |
|
|||||
n |
|
|
|
|
n |
|||||
Wn – мощность
Em и ωm – максимальная угловая скорость и максимальное ускорение углового вала.
29
Критерии выбора вычислительных устройств
1) критерий технической эффективности.
В качестве этого критерия используется эффективное быстродействие машины. Jt max Vэфj k jVномj
Vномj – номинальное быстродействие, определяемое быстродействием элемемнтов машины. kj – коэффициент пропорциональности:
kj=kэфj·kkj·kнпj
kэфj – коэффициент учитывающий эффективность системы команд машины, особенности структуры
машины,
kkj – коэффициент учитывающий снижение быстродействия за счёт включения в систему средств,
обеспечивающих требуемую надёжность,
kнпj – коэффициент учитывающий потери времени на профилактику и устранение неисправностей. kj должно быть <1,
j – номера сравниваемых машин.
2) Критерий технико-экономической эффективности.
Сущность этого критерия заключается в определении показателя, который бы давал оценку стоимости выполнения одной операции.
|
L2 j t |
|
|
|
Jmэ min gi |
|
|||
tVэфj |
|
|||
|
|
|
gi – цена эффективности БД,
L2j(t) – общая сумма затрат на постройку и эксплуатацию машины в течение времени t до момента его полного износа.
3) Критерий экономической эффективности (критерий минимальных затрат) J min Wпр С j нормWэj
Wпр – приведённые затраты,
Сj – единовременные капитальные затраты, имеющие место в момент установки, τнорм – нормальный срок окупаемости,
Wэj – эксплуатационные расходы в 1-й момент времени.
30
Адаптивные системы 1. Системы экстремального регулирования
Системами экстремального регулирования называются системы, в которых задающие воздействия, то есть заданные значения регулируемых величин, определяются автоматически, в соответствии с экстремумом некоторой функции F(y1, y2, …yn). Эта функция
зависит не только от регулируемых величин y1, y2, …yn, но и от неконтролируемых параметров системы и времени.
Условием экстремума дифференциальной функции нескольких переменных является равенство нулю в точке экстремума частных производных этой функции.
F |
0 |
F |
0 |
F |
0 |
F |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
y |
y |
2 |
y |
y |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
dF |
|
|
dF |
|
|
|
dF |
|
|
|
dF |
||||||||||||
Градиентом функции называется векторная величина: gradF k |
k |
k |
|
... k |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 dy |
|
|
2 dy |
2 |
|
|
3 dy |
3 |
|
|
n dy |
n |
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
где k1, k2, k3, …,kn – единичные векторы осей, по которым отсчитываются величины y1, y2, y3, …,yn. В точке экстремума gradF=0
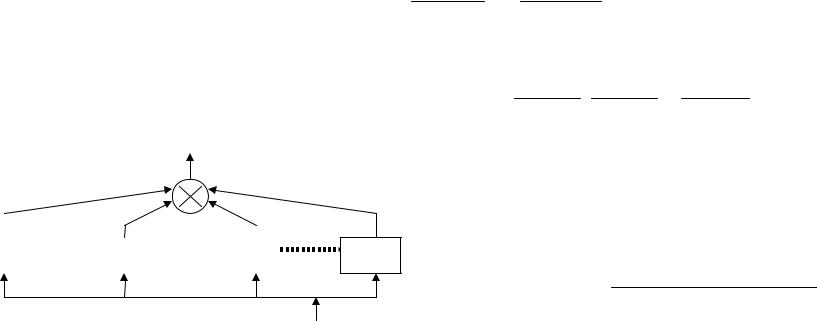
Способ синхронного детектирования
Основан на том, что к основным медленно меняющимся величинам добавляются малые гармонические составляющие
y |
|
y0 |
A sin t |
|
|
|
|
|
||
1 |
1 |
1 |
1 |
|
|
A1sinω1t |
|
|
||
|
|
Регулируемый |
|
|||||||
|
|
0 |
A2 sin 2t |
|
||||||
y2 |
y2 |
|
|
объект |
|
|||||
A2sinω2t |
|
|||||||||
|
|
|
|
|
|
|
|
|||
............................. |
|
|
|
|
|
|||||
|
A3sinω3t |
|
|
|||||||
y |
|
y0 |
A |
sin |
|
t |
|
|
||
n |
n |
|
|
|
|
|||||
|
n |
n |
|
|
|
|
|
|
||
sinω1 |
|
|
|
t |
|
U1 |
|
CD1 |
|
||
sinω2t |
sinω3 |
|
|
CD2 |
U3 |
||
t |
|||
|
|
||
|
CD3 |
U3 |
31