

Тактика технических данных (ттд) современных птурс.
Поражаемая цель: ТАНКИ, суда, вертолеты.
Проблемы: 1) повышенная скрытность действий комплекса
борьба с запылением (задымлением) траектории снаряда.
Система самонаведения лзрк (переносного зенитно-ракетного комплекса).
Система применяется для поражения высокоскоростных маневрирующих воздушных целей при стрельбе на встречных и дальних курсах. Обслуживается одним человеком.
Требования к СУ:
малые габариты и вес
высокая эксплуатационная надежность
ИК излучение
Компромисс между точностью и устойчивостью, решается в пользу устойчмвости. Система должна обеспечить маневрирования снаряда в процессе наведения с высокой скоростью.
Высокая точность системы на конечном участке наведения. Требования к малым весам и габаритам не позволяют иметь в снаряде мощную боевую часть.
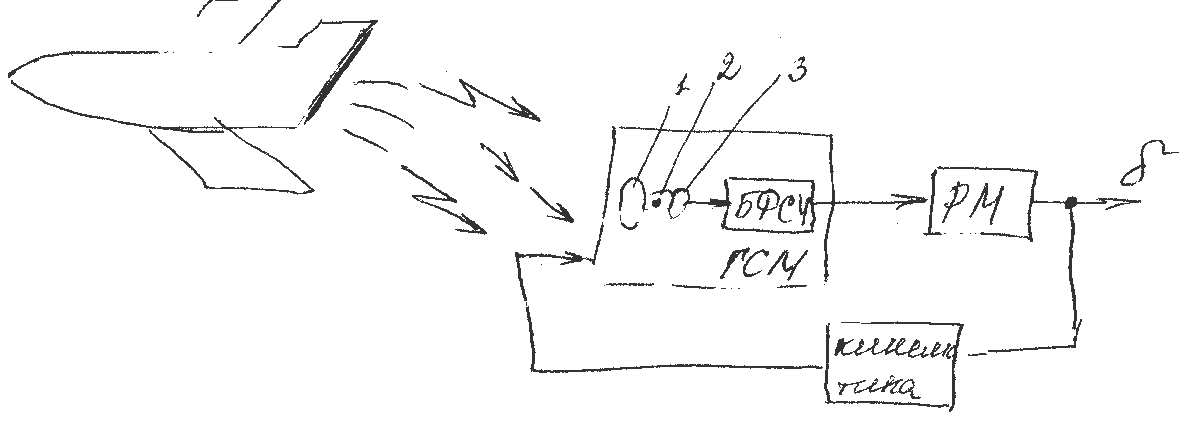
1 – оптика
2 – моделирующий растр
3 – чувствительный элемент
В качестве метода наведения, используется метод пропорционального сближения, когда сигнал управления на рули пропорционален угловой скорости разворота линии видимой цели. Головка самонаведения может быть реализована в 2х видах: 1) связанная головка; 2)развязанная (следящая)
Алгоритм работы комплекса.
Организуется служба раннего оповещения, которая указывает направление вероятного поведения цели
Стрелок предварительно направляет пусковое устройство в зону вероятного поведения цели.
Производится раскрутка гироскопа головки самонаведения.
Осуществляется захват головкой самонаведения приближающейся цели.
Производится пуск ракеты.
Системы автоматического управления летательными аппаратами.
******

Требования к системе управления:
Точность определяется величиной оценки в контролируемом времени. Δ = ±2000 м.
Обеспечение высоких запасов устойчивости.
Информативность бортовой вычислительной системы высокая. (обеспечивается за счет гироскопических датчиков и акселерометров).
т.к. величина конечной ошибки в существенной мереопределяется точностью измеряемых координат, то большое внимание уделяется топографической привязки координат пункта и цели.
Системы управления промышленными роботами.
Первые роботы появились в начале 40-х годов прошлого века на фрезерных станках.
Области применения промышленных роботов:
Перемещение грузов в системах крупносерийного и массового производства. (обеспечивают перемещение грузов с повышенной точностью по перемещениям при условии исполнения многократных повторяющихся движений, например автосварочное производство).
Выполнение технологических операций в экологически вредной среде (радиоактивные вещества, лакокрасочные покрытия).
Загрузка технологического оборудования.
Сборочное производство.
Классификация промышленных роботов.
Возможна классификация по различным параметрам:
По назначению и области применения
По типу привода
– электропривод (“+” – высокая точность, возможность воспроизведения сложных траекторий, простота сопряжения исполнительной части с вычислительной).
– гидравлический привод (“+” – возможность получения высоких переместительных усилий, точность; “-” – необходимость в специальном рабочем теле, высокая стоимость).
– пневмопривод (“+” – простота и дешевизна, “-” – трудность управления и сопряжения с вычислителем).
По скелеотехнике системы управления. В зависимости от степени интеграции электронных компонентов:
роботы на дискретной элементарной базы.
Микросхемы малой степени интеграции (серия к155)
Микросхемы большой степени интеграции
Микропроцессоры и большие интегральные схемы.
По физической компоновке робота.
Физическая компоновка обеспечивает рабочему органу робота перемещение в некотором фазовом пространстве. Основной характеристикой этого пространства является максимальное число степеней свободы.